”URDF“ 的搜索结果

库卡kr20的urdf文件
标签: 库卡 urdf
库卡kr20的urdf文件,使用sw2019进行导出,ros的测试环境为Ubuntu18.04,测试可用,具体的调试可以后期自己慢慢调 注意:如果不会使用,谨慎下载
机器人操作系统ROS(十):机器人建模
摆烂才是王道
如何使用这样一个文件描述机器人呢?...ROS中的建模方法叫做URDF,全称是统一机器人描述格式,不仅可以清晰描述机器人自身的模型,还可以描述机器人的外部环境,比如这里的桌子,也可以算作一个模型。
履带底盘urdf文件

URDF 文件是一个标准的 XML 文件关于gazebo标签,后期在使用 gazebo 仿真时,才需要使用到,用于配置仿真环境所需参数,比如: 机器人材料属性、gazebo插件等,但是该标签不是机器人模型必须的,只有在仿真时才需设置...
1.什么是URDF? URDF全称(United Robotics Description Format)统一机器人描述格式,是一个XML语法框架下用来描述机器人的语言格式,URDF在ROS界很流行。我们可以通过URDF对机器人建模然后放到ROS里面进行仿真与...
urdf2webots 此工具将URDF文件转换为Webots PROTO文件。安装从点子pip install urdf2webots在macOS上,将pip二进制路径导出到PATH: export PATH="/Users/$USER/Library/Python/3.7/bin:$PATH"从来源git clone ...
urdf_parser_py 开发设置 您必须手动运行setup.py 。 对于catkin开发,您可以通过以下方式安装到$ ws /../ build / lib / pythonX.Y / dist-packages devel_prefix=$(cd $(catkin_find --first-only)/.. && pwd) cd...
SolidWorks 到 URDF 导出器是一个 SolidWorks 插件,可以方便地将 SW 零件和装配体导出到 URDF 文件中。导出器将创建一个类似 ROS 的包,其中包含网格、纹理和机器人(urdf 文件)的目录。对于单个 SolidWorks 零件...
realtime_urdf_filter 该软件包为深度图像提供了基于OpenGL的,基于着色器的加速过滤。 场景几何是在URDF模型中定义的,还有定义摄像机位置和过滤参数的参数。 只要TF延迟不是太高,静态环境模型和铰接式机器人模型...
1、资源内容:基于Matlab实现自由度机械臂仿真模型使用solidworks导出urdf格式 simscape工具箱(源码+使用说明+数据) 2、适用人群:计算机,电子信息工程、数学等专业的学习者,作为“参考资料”参考学习使用。 3、...
Denavit Hartenberg表到统一机器人描述格式 ... 转换后的代码给出了放置在Denavit-Hartenber参考系上的轴(作为URDF圆柱体)。 然后可以使用此元素来创建完整的URDF。 在同伴网站,您可以查看URDF并使用联合值。
Phobos导出URDF , SDF或SMURF之类的格式以及常见的网格格式(立体光刻(.stl), Wavefront (.obj)或Collada (.dae))。 Phobos与不来梅一起在不来梅的机器人创新中心发起,目前正在开发中。 如果有任何疑问...
Franka robot Franka Emika Panda机器人的URDF and meshes 文件
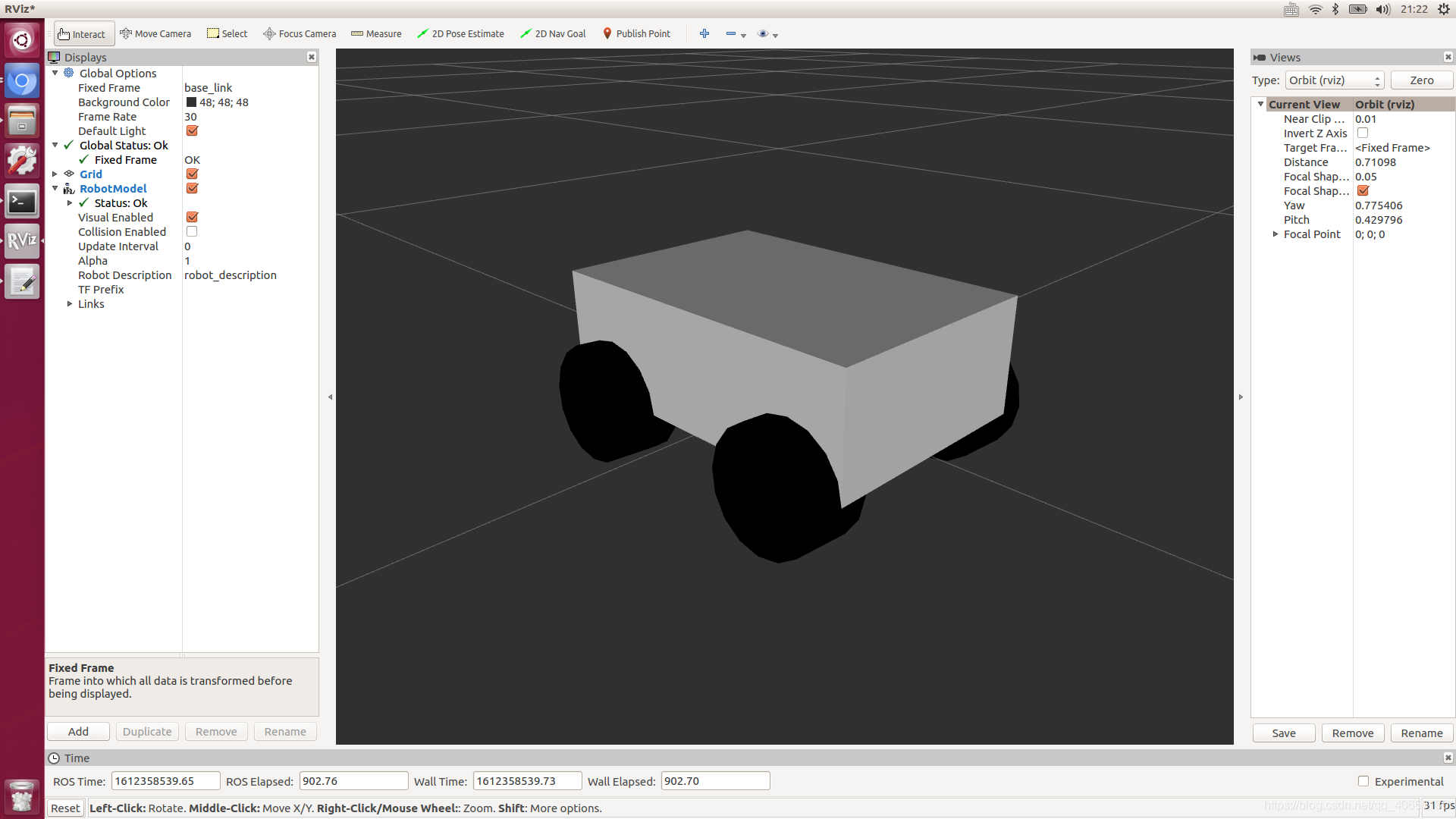
通过URDF自定义四轮小车模型
标签: 学习
通过URDF自定义四轮小车模型,即博客ROS学习(七)对应源码,博客地址:https://blog.csdn.net/u011832219/article/details/114936519
ur3_URDF文件,xacro.zip,使用Solidworks导出的URDF文件
matlab欧拉角算旋转矩阵代码RobEx03_FANUC-URDF 机器人课程@UniSa 的第三个练习。 2020/2021 学年。 导出 Fanuc 机器人的 DH 参数。 将 DH 参数转换为 URDF 并使用 urdf_tutorial display.launch 在 RViz 中可视化 ...
xacro 是 URDF 的升级版,易于修改机器人模型参数,生成xacro文件后进行检查分为如下几步 1 . cd 至 xacro 文件所在目录 例:cd ~/catkin_ws1/src/my_robot_description/urdf 2 . 分别执行如下命令 rosrun xacro ...
可实现URDF描述的文件
文章目录Solidworks导出的urdf文件在Gazebo中的仿真初处理0 从Solidworks中导出urdf文件1 测试导出的包2 修改已经生成的urdf文件2.1 修改urdf文件2.2 修改display.launch2.3 修改gazebo.launch3 创建控制功能包3.1 ...
履带底盘模型solidworks+urdf文件
1.基于市面上典型阿克曼小车设计SolidWorks三维模型; 2.小车拥有基本外形还有电池、控制器、深度摄像头等细节; 3.小车的URDF模型已经搭建好,可修改导出。
urdf-viz 可视化文件。 urdf-viz用Rust-lang编写。 安装 随cargo安装 如果您已经使用防锈琅和cargo的安装,您可以通过安装cargo install 。 cargo install urdf-viz (仅供参考)安装cargo curl --proto ' =...
将PUMA560机械臂的三维模型生成urdf文件导入MATLAB中。包含了PUMA560机械臂的零件和装配体,以及生成的urdf文件。
urdf-viz可视化URDF(统一机器人描述格式)文件。 urdf-viz用Rust-lang编写。 安装使用货物安装如果您使用的是rust-lan urdf-viz,请可视化URDF(统一机器人描述格式)文件。 urdf-viz用Rust-lang编写。 安装与货物...
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地