urdf语法详解-程序员宅基地
URDF 文件是一个标准的 XML 文件,在 ROS 中预定义了一系列的标签用于描述机器人模型,机器人模型可能较为复杂,但是 ROS 的 URDF 中机器人的组成却是较为简单,可以主要简化为两部分:连杆(link标签) 与 关节(joint标签),接下来我们就通过案例了解一下 URDF 中的不同标签:
- robot 根标签,类似于 launch文件中的launch标签
- link 连杆标签
- joint 关节标签
- gazebo 集成gazebo需要使用的标签
关于gazebo标签,后期在使用 gazebo 仿真时,才需要使用到,用于配置仿真环境所需参数,比如: 机器人材料属性、gazebo插件等,但是该标签不是机器人模型必须的,只有在仿真时才需设置
6.3.1 URDF语法详解01_robot
robot
urdf 中为了保证 xml 语法的完整性,使用了robot标签作为根标签,所有的 link 和 joint 以及其他标签都必须包含在 robot 标签内,在该标签内可以通过 name 属性设置机器人模型的名称
1.属性
name: 指定机器人模型的名称
2.子标签
其他标签都是子级标签
6.3.2 URDF语法详解02_link
link
urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性,比如: 机器人底座、轮子、激光雷达、摄像头...每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性

1.属性
- name ---> 为连杆命名
2.子标签
-
visual ---> 描述外观(对应的数据是可视的)
-
geometry 设置连杆的形状
-
标签1: box(盒状)
- 属性:size=长(x) 宽(y) 高(z)
-
标签2: cylinder(圆柱)
- 属性:radius=半径 length=高度
-
标签3: sphere(球体)
- 属性:radius=半径
-
标签4: mesh(为连杆添加皮肤)
- 属性: filename=资源路径(格式:package://<packagename>/<path>/文件)
-
-
origin 设置偏移量与倾斜弧度
-
属性1: xyz=x偏移 y便宜 z偏移
-
属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
-
-
metrial 设置材料属性(颜色)
-
属性: name
-
标签: color
- 属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])
-
-
-
collision ---> 连杆的碰撞属性
-
Inertial ---> 连杆的惯性矩阵
在此,只演示visual使用。
案例:
分别生成长方体、圆柱与球体的机器人部件
1.创建功能包,导入依赖
创建一个新的功能包,名称自定义,导入依赖包:urdf与xacro
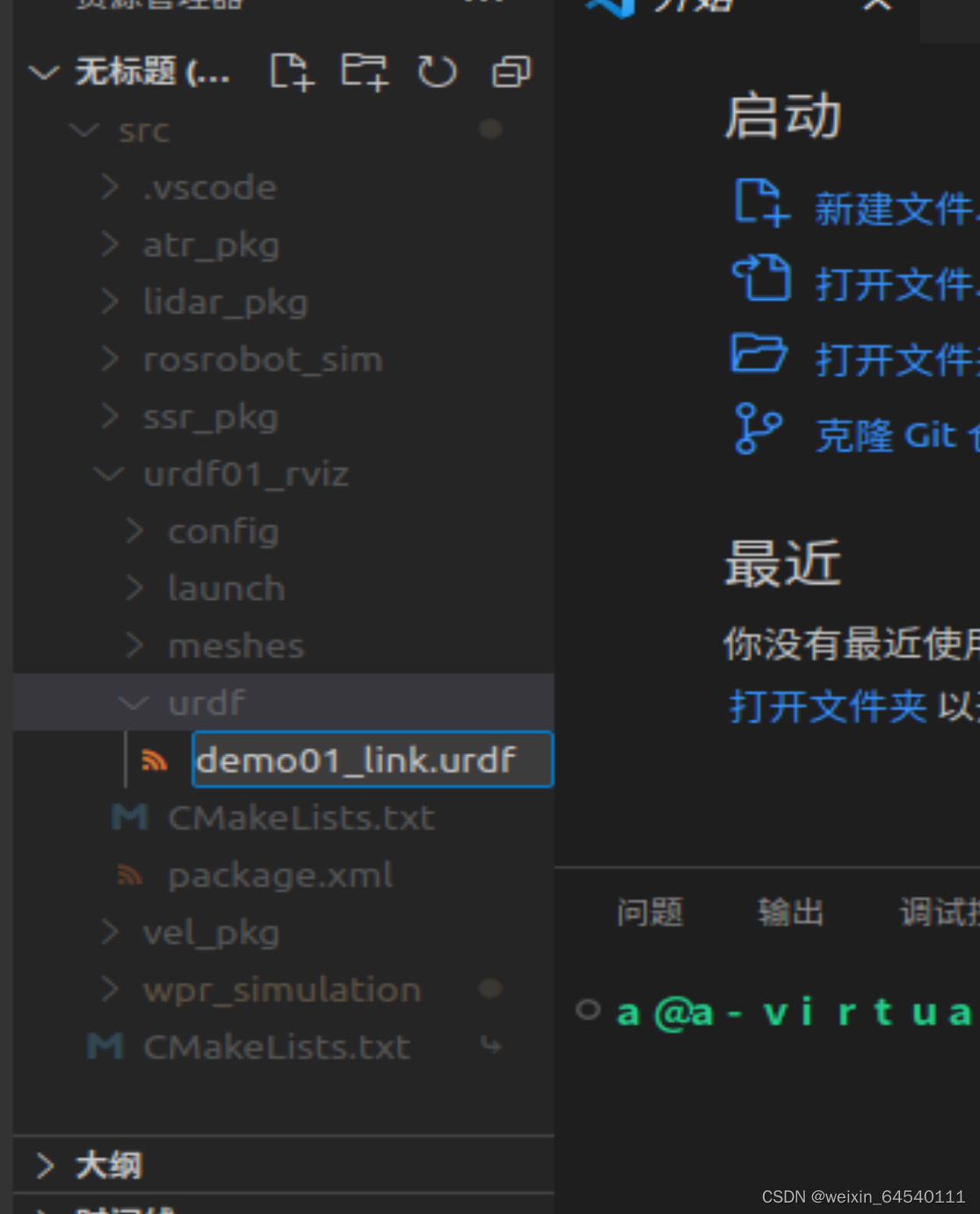
在当前功能包下,再新建几个目录:
urdf: 存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件
创建包的方法

catkin_create_pkg urdf01_rviz urdf xacro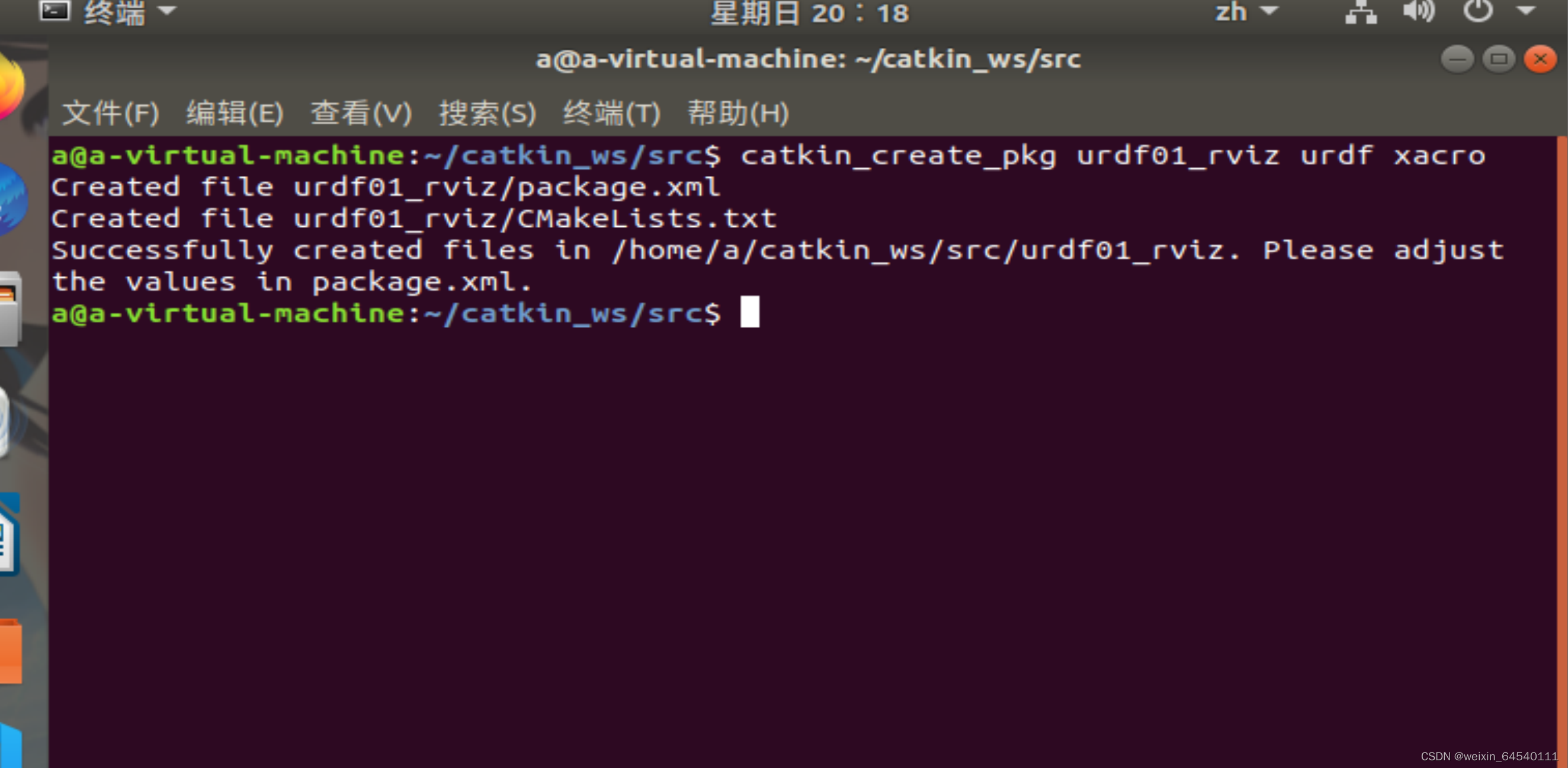

2.编写 URDF 文件
新建一个子级文件夹:urdf(可选),文件夹中添加一个.urdf文件
在urdf文件里使用link标签
《需求:设置不同形状的机器人部件》
<!--需求:设置不同形状机器人部件-->
<robot name="mycar"> <!-- naem后面是机器人名字 -->
<!-- link(连杆)标签 -->
<link name="base_link"> <!-- 给连杆命名 -->
<!-- 可视化模型-->
<visual>
<!-- 设置连杆的形状 形状 有开始有结束 -->
<geometry>
<!-- 长方体的长宽高 -->
<!-- <box size="0.5 0.3 0.1" /> -->
<!-- 圆柱,半径和长度 -->
<!-- <cylinder radius="0.5" length="0.1" /> -->
<!-- 球体,半径-->
<!-- <sphere radius="0.3" /> -->
</geometry>
<!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) -->
<origin xyz="0 0 0" rpy="0 0 0" />
<!-- 颜色: r=red g=green b=blue a=alpha -->
<material name="black">
<color rgba="0.7 0.5 0 0.5" />
</material>
</visual>
</link>
我打的:
<!--需求:设置不同形状机器人部件-->
<robot name="mycar"> <!-- naem后面是机器人名字 -->
<!-- link(连杆)标签 -->
<link name="base_link"> <!-- 给连杆命名 -->
<!-- 可视化模型-->
<visual>
<!-- 形状 -->
<geometry>
<!-- 长方体的长宽高 -->
<!-- <box size="0.5 0.3 0.1" /> -->
<!-- 圆柱,半径和长度 -->
<!-- <cylinder radius="0.5" length="0.1" /> -->
<!-- 球体,半径-->
<sphere radius="8" />
</geometry>
<!-- xyz坐标 rpy翻滚俯仰与偏航角度(3.14=180度 1.57=90度) -->
<origin xyz="0 0 0" rpy="0 0 0" />
<!-- 颜色: r=red g=green b=blue a=alpha -->
<material name="black">
<color rgba="0.7 0.5 0 0.5" />
</material>
</visual>
</link>

3.在 launch 文件中集成 URDF 与 Rviz
在launch目录下,新建一个 launch 文件,该 launch 文件需要启动 Rviz,并导入 urdf 文件,Rviz 启动后可以自动载入解析urdf文件,并显示机器人模型,核心问题:如何导入 urdf 文件? 在 ROS 中,可以将 urdf 文件的路径设置到参数服务器,使用的参数名是:robot_description
<launch>
<!-- 设置参数,在参数服务器载入urdf文件 -->
<param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
</launch>
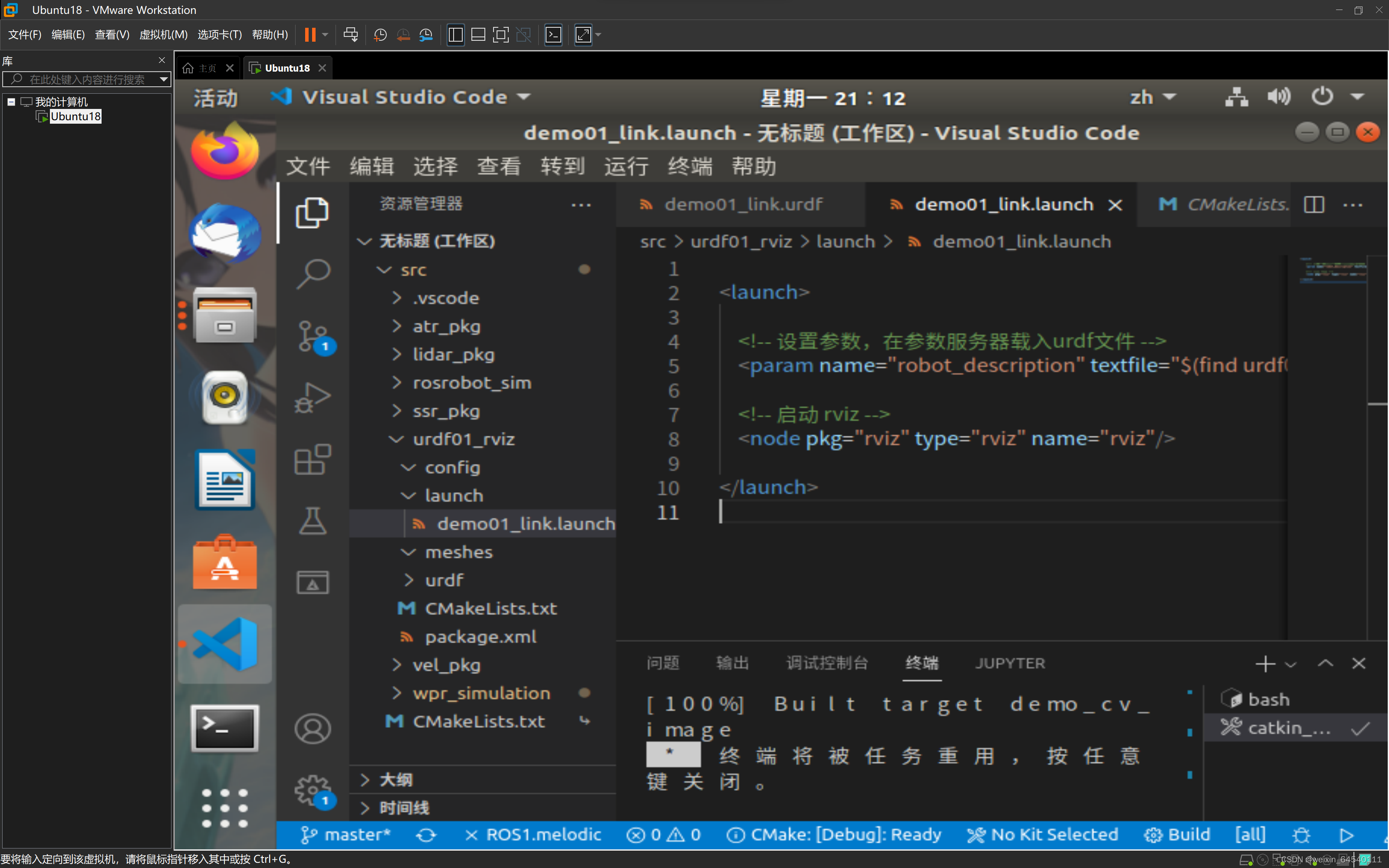
<launch>
<!-- 设置参数,在参数服务器载入urdf文件 -->
<param name="robot_description" textfile="$(find urdf01_rviz)/urdf/urdf/demo01_link.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz"/>
</launch>
启动launch文件
roslaunch urdf01_rviz demo01_link.launch 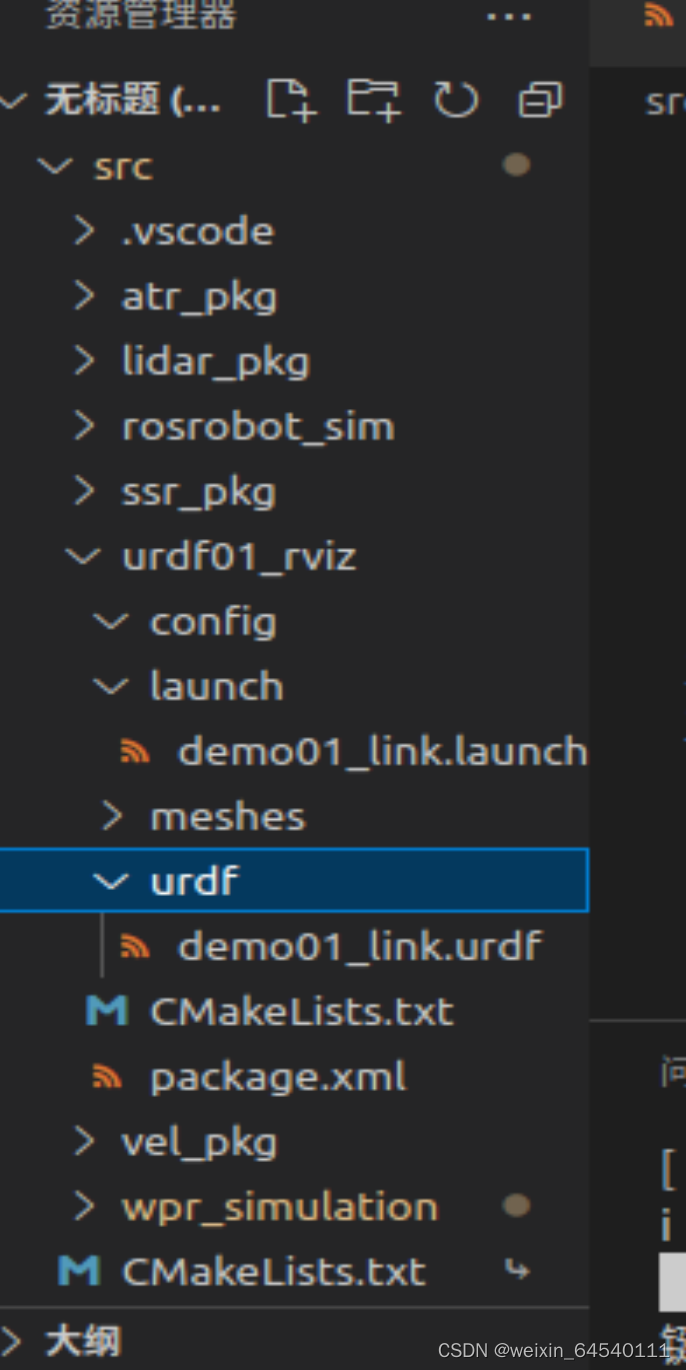

6.3.3 URDF语法详解03_joint
urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式: 旋转、滑动、固定、旋转速度、旋转角度限制....,比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。
joint标签对应的数据在模型中是不可见的

1.属性
-
name ---> 为关节命名
-
type ---> 关节运动形式
-
continuous: 旋转关节,可以绕单轴无限旋转
-
revolute: 旋转关节,类似于 continues,但是有旋转角度限制
-
prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
-
planer: 平面关节,允许在平面正交方向上平移或旋转
-
floating: 浮动关节,允许进行平移、旋转运动
-
fixed: 固定关节,不允许运动的特殊关节
-
2.子标签
-
parent(必需的)
parent link的名字是一个强制的属性:
- link:父级连杆的名字,是这个link在机器人结构树中的名字。
-
child(必需的)
child link的名字是一个强制的属性:
- link:子级连杆的名字,是这个link在机器人结构树中的名字。
-
origin
- 属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。
-
axis
- 属性: xyz用于设置围绕哪个关节轴运动。
- 3.案例
-
需求:创建机器人模型,底盘为长方体,在长方体的前面添加一摄像头,摄像头可以沿着 Z 轴 360 度旋转。
-
<!--
需求: 创建机器人模型,底盘为长方体,
在长方体的前面添加一摄像头,
摄像头可以沿着 Z 轴 360 度旋转
-->
<robot name="mycar">
<!-- 底盘 -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
</material>
</visual>
</link>
<!-- 摄像头 -->
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<!-- 关节 -->
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<!-- 需要计算两个 link 的物理中心之间的偏移量 -->
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
launch文件示例如下:
<launch>
<param name="robot_description" textfile="$(find urdf_rviz_demo)/urdf/urdf/urdf03_joint.urdf" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf_rviz_demo)/config/helloworld.rviz" />
<!-- 添加关节状态发布节点 -->
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<!-- 添加机器人状态发布节点 -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<!-- 可选:用于控制关节运动的节点 -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
</launch>
PS:
1.状态发布节点在此是必须的:
<!-- 添加关节状态发布节点 -->
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<!-- 添加机器人状态发布节点 -->
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
Copy2.关节运动控制节点(可选),会生成关节控制的UI,用于测试关节运动是否正常。
<!-- 可选:用于控制关节运动的节点 -->
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
Copy4.base_footprint优化urdf
前面实现的机器人模型是半沉到地下的,因为默认情况下: 底盘的中心点位于地图原点上,所以会导致这种情况产生,可以使用的优化策略,将初始 link 设置为一个尺寸极小的 link(比如半径为 0.001m 的球体,或边长为 0.001m 的立方体),然后再在初始 link 上添加底盘等刚体,这样实现,虽然仍然存在初始link半沉的现象,但是基本可以忽略了。这个初始 link 一般称之为 base_footprint
<!--
使用 base_footprint 优化
-->
<robot name="mycar">
<!-- 设置一个原点(机器人中心点的投影) -->
<link name="base_footprint">
<visual>
<sphere radius="0.001" /><geometry>
</geometry>
</visual>
</link>
<!-- 添加底盘 -->
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
</material>
</visual>
</link>
<!-- 底盘与原点连接的关节 -->
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 0.05" />
</joint>
<!-- 添加摄像头 -->
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
</geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
</material>
</visual>
</link>
<!-- 关节 -->
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
</joint>
</robot>
launch 文件内容不变。
智能推荐
Laya的粒子效果-程序员宅基地
文章浏览阅读1.6k次,点赞2次,收藏3次。参考:UI页面、粒子、动画、脚本新建面板详解Laya版本:2.5.0一创建一个粒子效果在UI编辑界面右键-> 新建 -> 粒子粒子有重力模式和半径模式重力模式:粒子是一个角度向另一个方向呈发射式的粒子效果半径模式:围绕中心点为半径的旋转式粒子效果两个模式除了初始参数不同,没有什么区别。你可以创建一个重力模式粒子,然后通过调整参数,实现半径模..._laya 粒子效果
flutter 加密安全-程序员宅基地
文章浏览阅读1.4k次,点赞20次,收藏18次。数据的加密解密操作在 日常网络交互中经常会用到,现在密码的安全主要在于 秘钥的安全,如论 DES 3DES AES 还是 RSA, 秘钥的算法(计算秘钥不固定) 和 保存,都决定了你的数据安全;但是常见的逆向操作 比如 hook 加密算法 都很容易拿到 秘钥; 这个时候我们可以 回溯到 之前的 古典密码学(依赖算法本身),基本思路 置换 移位 编码 等等手段 来配合 加密算法一起使用,提高我们应用的安全;
Verilog测试:TestBench结构_verilog testbench-程序员宅基地
文章浏览阅读6.1w次,点赞147次,收藏1k次。目录1. 完整的TESTBENCH文件结构2.时钟激励产生3.复位信号设计4.双向信号设计5. 特殊信号设计6.仿真控制语句以及系统任务描述7.加法器的仿真测试文件编写 Verilog功能模块HDL设计完成后,并不代表设计工作的结束,还需要对设计进行进一步的仿真验证。掌握验证的方法,即如何调试自己的程序非常重要。在RTL逻辑设计中,要学会根据硬件逻辑来写测试程..._verilog testbench
【Java面试题】这道分布式面试题一定要拿下,说说你对CAP的理解?看看高手如何回答_mic老师50万字面试宝典-程序员宅基地
文章浏览阅读284次。分布式架构之所以复杂,就是因为增加了网络通信,而网络通信本身具有不确定性。但是作为业务支撑的整个技术架构,所有业务的处理必须要具备确定性。因此在这样一个矛盾下,导致架构变得更加复杂。面试题”说说你对CAP的理解“这个问题,就是在这个背景下产生的大家好,我是Mic,一个工作了14年的Java程序员。下面我们来分析一下面试官对于这个问题的考察意图。_mic老师50万字面试宝典
Java-编码-Base64-程序员宅基地
文章浏览阅读316次,点赞9次,收藏11次。Java-编码-Base64
sgu288:Best Tournament Schedule(构造)_tournamentschedule时间复杂度-程序员宅基地
文章浏览阅读566次。题目大意: ~~~~~~一场比赛有 n ~n~个参赛选手,要求选手之间两两都有且仅有一次对决。每一轮中一个选手至多可以对决一次,也就是每一轮选出若干对不相交的选手进行对决。现在要求出最少的对决轮数来结束比赛和此时的对决方案。分析: ~~~~~~首先确定答案,当 n ~n~为偶数的时候,答案为 n−1 ~n-1~,否则为 n ~n~,另外,当 n=1 ~n=1~的时候,答案_tournamentschedule时间复杂度
随便推点
MS SQL Server2008大数、小数转varchar_dable怎么转成varchar-程序员宅基地
文章浏览阅读443次。试了下str, cast和convert,发现对于小数或大数,多少都存在一些问题,最后经过尝试终于找到一种满意的答案:select cast(HTJE as decimal(20,2)) from T_HTGL where ID = 1002993对于金额部分,这里设置了小数最多2位,能满足需求,尾部的0会自动去除,搞定!..._dable怎么转成varchar
解决el-radio-group只触发一次的问题-程序员宅基地
文章浏览阅读569次,点赞7次,收藏6次。把原来绑在el-radio-group的事件取消调 再el-radio-button俩个上面都绑定@click.native.prevent="changeMerge(1)"一个传1 一个传2 这样就触发了。原来想的是用el-button来写,试过el-button点多少次都会触发二次确认框 但是你需求更改其样式,还要把其样式修改为el-radio-button的样式 工程量比较大 所以没深研究。1.需求是点击合并后,出来二次确认框。现在的问题是点击完出现二次确认框后,再次点击不出来二次确认框了。_el-radio-group
MSVCRTD.lib(crtexew.obj) : error LNK2019: 无法解析的外部符号 _WinMain@16,该符号在函数 ___tmainCRTStartup 中被引用 Debug_pace.lib(crtexew.obj) : error lnk2019: 无法解析的外部符号 _-程序员宅基地
文章浏览阅读1.3k次。原问题:MSVCRTD.lib(crtexew.obj) : error LNK2019: 无法解析的外部符号 _WinMain@16,该符号在函数 ___tmainCRTStartup 中被引用Debug\jk.exe : fatal error LNK1120: 1 个无法解析的外部命令参考了这位大神九年前的博客:https://blog.csdn.net/playstudy/article/details/6661868我的环境是VS2010学习版(以下摘自上文原博客)产生这个问题的_pace.lib(crtexew.obj) : error lnk2019: 无法解析的外部符号 _winmain@16,该符号
smardaten新版本来啦~_smardaten平台页面如何自适应-程序员宅基地
文章浏览阅读311次。目前smardaten已成功服务10+行业,300+大型企业客户,越来越多的用户活跃于平台之上。使用过程中,大家依据各行业的应用场景和需求给我们提出了非常多好的建议和想法,而V8R4C60这个版本的更新内容有很大一部分就来自于这些用户。非常感谢大家的建议,正是这些建议促进我们的产品不断地迭代、进步,变得更好用。_smardaten平台页面如何自适应
imp导入IMP-00098: INTERNAL ERROR: impccr2_字符集_部分存储过程创建不了-程序员宅基地
文章浏览阅读9.1k次。Metalink 说Symptom(s) ~~~~~~~~~~ Export from a V734 database, while importing in V920 database gave imp-98 error: IMP-00098: INTERNAL ERROR: impccr2 Cause ~~~~~~~Imp-98 errors were g_imp-00098: internal error: impccr2
指令计数器--Program counter-程序员宅基地
文章浏览阅读3.1k次,点赞2次,收藏3次。别名:指令指针、指令地址寄存器、程序计数器;操作:顺序操作(计数器加一)、分支操作(计数器修改);Theprogram counter(PC), commonly called theinstruction pointer(IP) inIntelx86andItaniummicroprocessors, and sometimes called theinst..._program counter