”相机标定“ 的搜索结果
相机标定的原理及实现
标签: 相机标定

相机标定实验报告


相机标定PPT ,内容包含标定目的,四种坐标的转换、张正友标定法、单应性矩阵的求解、相机内参外参的求解,畸变矫正等。适用于学习单目双目视觉的研究者了解相机测距和三维建模等的原理。


什么是相机标定? 在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些...
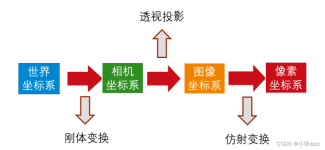
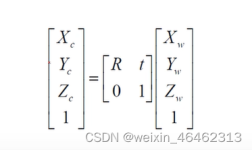
像素坐标系的单位为pixel,其中为成像平面中心点在像素坐标系下的坐标,和分别表示在像素坐标系下, x 轴和 y 轴方向每个像素的物理尺寸...内参矩阵取决于相机内部参数,外参矩阵取决于相机坐标系和世界坐标系的位置。
张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机标定---棋盘格图像下载 10 张 张正友相机...
相机标定相机标定的目的 获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像。 相机标定的输入 标定图像上...
基于opencv&c++的相机标定,建立世界坐标,寻找12个对应的图象坐标,计算出相机的内外参数。然后给出一个世界坐标,点击图片,自动给出对应的图象坐标。
基于Matlab开发的针对相机的单目标定和多目标定源码,实现相机内参与外参的自动生成
【程序老媛出品,必属精品,亲测校正,质量...源码说明: 基于matlab实现相机标定程序源码 matlab相机标定,直接线性法,透视投影矩阵法 包含完整源码和注释 非常适合借鉴学习 适合人群:新手及有一定经验的开发人员
针对现有参数化Scheimpflug相机标定方法中初值确定过程复杂的问题,提出一种非参数化的基于广义成像模型的Scheimpflug相机标定方法。该模型将Scheimpflug相机看作一组像素和其对应的虚拟空间光线的集合,标定直接...
基于opencv的双目相机标定程序,用的张正友的方法,非常好用的程序,使用前需要先获得单目相机标定的参数,然后带入此双目程序,再根据拍摄的两相机公共视场下的棋盘格的图像,就可以解算出两相机之间的位置关系,...
在基于圆点阵二维平面靶标的相机标定方法中,直接在拍摄的标靶图像中提取的椭圆中心并非真实的圆心投影像点,该圆心成像投影偏差必然会降低相机参数标定精度。基于此,提出将标靶图像逆向投影至空间虚拟矩阵以获得真实...
改进过的张正友标定法,可以用于使用圆形标记点标定板的相机标定。
相机标定棋盘格图片,jpg&png格式,有OpenCV和MATLAB版本,棋盘形状有7*10方形和16*16正方形两种。打印后可以直接使用。
相机标定图片.zip
标签: 相机标定 张正友
两组用于测试相机标定代码的棋盘格图片,含图片参数,包括内角点数和棋盘格大小的说明,理论部分可参考https://blog.csdn.net/BEJ97/article/details/107877021
为了解决运动参数光电探测过程中的相机标定问题,制作一种两端及中间各安装一个红外反光标记球的一维标定物。不需要其它复杂标定装置,只要将这种特制的一维标定物在测量空间内多次随意移动并摄取其图像,即可实现标定...
机器视觉,使用c#进行相机内参数标定有代码,有界面,有图像
使用了OpenCvSharp资源开发包,在VS下做了一个棋盘格图像下的相机标定助手小Demo,显然,C#也可以用OpenCv了。这是一个比较好的案例,可以参考下。鄙人不才,也用它做了一个SFM三维重建的Demo,这里就不放了。 具体...
鱼眼相机标定及校正,利用opencv对鱼眼相机进行标定及校正,输出校正后图像
进行单目相机的标定,输出单目相机的内参参数,可用于后续双目相机的标定
张正友的单目相机标定原理的源码,本人测试过可用
针孔、鱼眼相机标定,包括单目和双目标定demo, 基于OpenCV和C++。
张正友相机标定Opencv实现(完整程序+棋盘图)实例源码 张正友相机标定Opencv实现,附棋盘图和14张不同角度标定图。 包含完整的工程代码,有详细的注释说明,一键运行。实现了相机标定、输出相机内参、外参、旋转...
推荐文章
- Pytorch Dataloader 模块源码分析(二):Sampler / Fetcher 组件及 Dataloader 核心代码-程序员宅基地
- Asp类型判断及数组打印-程序员宅基地
- Adroid Studio 2022.3.1 版本配置greendao提示无法找到_plugin with id 'org.greenrobot.greendao' not found-程序员宅基地
- esxi查看许可过期_解决Vsphere Client 60天过期问题-程序员宅基地
- CMake_cmake_module_path-程序员宅基地
- 生产者消费者模型-程序员宅基地
- Adaptive AUTOSAR 解决方案 INTEWORK-EAS-AP_autosar的eas-程序员宅基地
- 穿山甲SDK错误码40025_穿山甲sdk错误码4025-程序员宅基地
- css firefox下的兼容问题_css 只用于firefox-程序员宅基地
- 【Python】对大数质因数分解的算法问题_python分解多个质因数代码-程序员宅基地