模仿对象Stanford Doggo是一种四足机器狗,由斯坦福学生机器人俱乐部的极限流动团队开发。灵活的移动性使其可以走路、小跑、跳舞、跳跃、后空翻等。重量不到5千克,最高跳跃1.07米,能以0.9米/秒的速度向前移动...
”四足机器人“ 的搜索结果

四足履带机器人_零件图_机械工程图_机械三维3D设计图打包下载
使用IMU作为数据输入,把机器人的姿态作为输出。得到四足机器人的自稳效果。

一文了解四足机器人的步态设计!
标签: 机器人
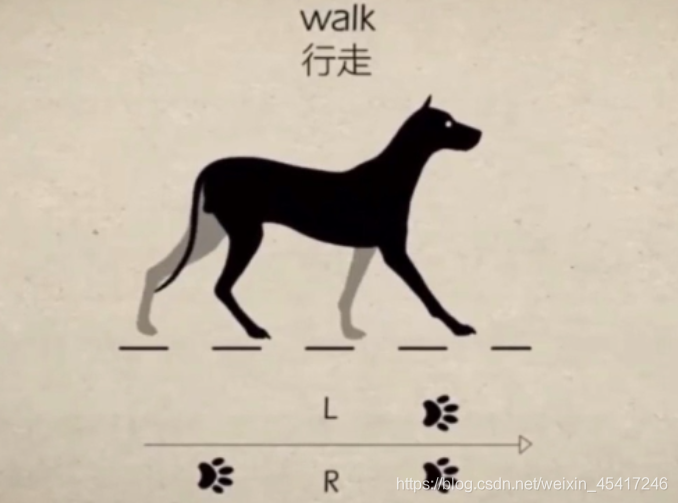
3D视觉工坊学习交流群0、步态规划四足机器人控制当中,步态是至关重要的一项。我们可以简单理解成四足机器人运动过程中各腿的状态,在这套设计方案中,我们对步态的规划主要分成两大主要部分,即接触状态和周期函数...
仿生智能与机器人2(2022)100029四足机器人的发展概况:关节构型、动态运动控制方法和移动操作方法柴辉a、b,李宜宾a、b,刘晓波a、b,宋瑞a、b,张国腾a、b,张中Qa、b、c,宋柳a、b,侯锦棉a,b,辛亚贤a,b,...
其次,在于感知平台可靠性及操作平台的...最后,相对轮式平台,普通四足机器人需要12个以上关节电机,且这些电机通常不会工作在额定值范围,这些电机低效工作导致巨大能量浪费与发热,对电源及电机散热均带来巨大挑战。
舵机连接到PCA9685的顺序按序号增大依次为左前、右前、左后、右后,依次连接上、中、下三层舵机。...最近决定研究一下四足机器人,但市面上的产品,要么性价比低,要么性能达不到要求。(轮子作为装饰,使用铜柱固定)
四足机器人 初步认识 仿制机器人介绍 -Stanford Doggo 四足机器人的机械结构 腿型 动力搭配 硬件清单 Odrive和无刷电机控制方式 一、Stanford Doggo Stanford Doggo由斯坦福学生机器人俱乐部的极限流动...
今年10月上旬,云深处科技发布“绝影X30”四足机器人
四足爬行机器人sw18可编辑

四足机器人系统设计
创客项目秀|基于树莓派的四足灭火机器人
1.简要叙述电驱动四足机器人的发展历史.电驱动四足机器人的发展历史可以追溯到20世纪60年代。当时,研究人员开始尝试使用电动马达和传感器来设计和构建四足机器人,以模仿动物的步态和行为。然而,由于当时技术水平...
〔四足机器人〕哔哩吧啦 [四足机器人]动态调整仿真测试


衡宇 发自 凹非寺量子位 | 公众号 QbitAI双足机器人赛道,又迎来一名搭载AI大模型的玩家。西湖机器人,西湖大学机器智能实验室的转化项目,被曝将重点涉猎双足机器人领域,并且是搭载GPT大模型的版本,以行为/轨迹为...
准备参加宁波市青少年科技创新大赛,设计了FPV救援四足机器人。
#资源达人分享计划#
CHAMP 是一个开源开发框架,用于构建新的四足机器人和开发新的控制算法。该控制框架基于“利用模式调制和阻抗控制的高动态运动分层控制器:在麻省理工学院猎豹机器人上的实现”。核心特点:完全自主(使用 ROS 导航...

https://www.bilibili.com/video/BV1jB4y147RJ/?spm_id_from=333.788.recommend_more_video.0资源地址,下载用
四足机器人.docx

四足机器人步态模型四足机器人的步态仿真研究
四足机器人32f1.zip
标签: 四足机器人
8自由度四足机器人 主控stm32f1 可自己设计 有注释
推荐文章
- js给div添加值_js给div添加内容-程序员宅基地
- oracle数据库中最常用的sql语句_oracle数据库常用sql-程序员宅基地
- map-server保存地图参数设置,使地图二值化_二值化 地图 生成器-程序员宅基地
- @ConditionalOnBean 与Bean注册优先级_conditionalonbean顺序-程序员宅基地
- 【C语言】模拟一个简单的银行系统(只涉及最简单的switch语句)_c语言,使用do while循环语句编写银行密码系统程序-程序员宅基地
- 个人电脑怎么搭建服务器 花生壳内网穿透 设置路由器虚拟服务器_192.168.2.128-程序员宅基地
- Telink 825x - SDK软件结构_telink tls825x 蓝牙芯片sdk-程序员宅基地
- vue可视化面板创建项目_可视化创建vue项目-程序员宅基地
- android加音乐歌词代码,Android简易音乐播放器实现代码-程序员宅基地
- Vue 2.x 项目升级到 Vue 3详细指南【总结版】_vue2升级vue3-程序员宅基地