
”变换矩阵“ 的搜索结果
透视变换的转换矩阵也与仿射变换的矩阵不同,是一个 3×3 的矩阵。输入点为(x,y),经过矩阵变换后为(x,0),该点也是在x轴上且距离输入点最近的点。以上变换中的cx+dy中的x和y可以使多项式,可以是矩阵,还可以是...
二维离散傅里叶变换矩阵表示1
标签: 矩阵
设 其中 计算步骤:对图像按行执行次一维得到 对矩阵按列执行次一维得到 计算步骤:对频率矩阵按行执行次一维得到 对矩阵按列执行次一维得到。
1、变换矩阵 变换矩阵可以分解为缩放,旋转,平移矩阵的乘积: M = T * R * S - 右手坐标系 当均匀缩放时,旋转和缩放可以交换顺序 缩放和平移不可以交换顺序 2、子坐标系与父坐标系 由在父坐标系中的坐标位置...
同理,Vrot⊥是通过正交分解求的,Vrot⊥在旋转的过程中长度不变(始终等于V⊥),因此V⊥的模乘以cosθ就是Vrot⊥在红色面上的投影长度,再把这个长度乘以V⊥方向的单位向量(b)就是Vrot⊥在红色面上的分量【同理...
为矩阵向量创建 Haar 小波变换矩阵 H Haar小波变换的乘法实现。 此函数使用以下漂亮的公式来创建 Haar 变换矩阵: H_n=1/sqrt(2)[H_(n/2) 克朗 (1 1) I_(n/2) 克朗 (1 -1)], 其中“kron”表示克罗内克积。 迭代从 H_...
SVD解算对应点集的刚体变换矩阵
标签: SVD
SVD解算对应点集的刚体变换矩阵
生成DCT变换矩阵,对8*8的变换矩阵产生基图像
matlab开发-Haar小波变换矩阵化。创建Haar小波变换矩阵

根据两张图片(经过变换的)中的特征点对,求解出其单应矩阵(或者变换矩阵)--多视图几何!---基于Opencv的C++源码
根据自定义的单应变换矩阵,对图像进行单应变换,其实不光是单应变换,通过自己设定变换矩阵H,根据xH=x‘,可以进行任意变换,注意变换矩阵不要设定的太离谱
三维空间刚体变换:变换矩阵
标签: 线性代数
【OpenGL】二十、OpenGL 矩阵变换 ( 矩阵缩放变换 | 矩阵旋转变换 | 矩阵平移变换 ) https://hanshuliang.blog.csdn.net/article/details/112859256 博客源码 ( 该源码是 Windows 桌面程序 , 使用 Visual Studio ...
本文介绍了仿射变换的类型及其关系以及仿射变换矩阵,基本的仿射变换包括平移、旋转、缩放和错切,镜像可以看做特殊的缩放。实际中一般图像的仿射变换就是平移、旋转、缩放和错切的叠加组合,每叠加一个处理,就进行...
从直观的角度看,仿射变换和透视变换的最大区别是:一个平行四边形,经过仿射变换后... 所以,仿射= 旋转 + 平移 仿射变换矩阵为: 其中,(x,y)是原图坐标,(x’,y’)是变换后的坐标;m11,m12,m21,m22为旋转量,m13,


本节以绕图像中心点循环旋转的组合仿射变换和以图像中心点开始与x轴成30°夹角的线段作为依赖轴的循环错切的组合仿射变换为例,详细介绍了二者的OpenCV-Python实现。通过相关案例的介绍,对前面4节介绍的仿射变换...
齐次坐标变换、齐次变换矩阵、ROS2、ROS、机器人



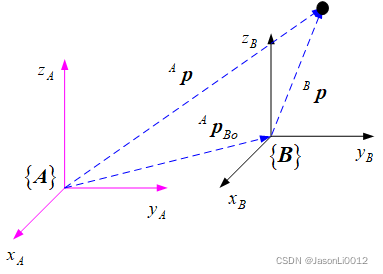
刚体运动: 两个坐标系之间的运动变换由一个旋转加上一个平移组成,这种运动就是刚体运动。刚体运动过程中,同一个向量在各个坐标系下的长度和夹角都不会发生变化。此时,我们说手机坐标系和世界坐标系之间,相差了...



1.平移变换 2.旋转变换 由固定坐标系旋转到另一个坐标系。

已知坐标系 AAA 相对于坐标系 BBB 的齐次变换矩阵为 TABT_{A}^{B}TAB,有时在求解问题时需要依据 TABT_{A}^{B}TAB 求取坐标系 BBB 相对于坐标系 AAA 的齐次变换矩阵 TBAT_{B}^{A}TBA ,这个问题可以简单的描述...
推荐文章
- 什么是ABA问题及ABA问题的解决方法。-程序员宅基地
- muduo库的Singleton类剖析_muduo网络库中的sinleton类是干嘛的-程序员宅基地
- attach java_【JAVA新生】nio attach引发的问题-程序员宅基地
- 位掩码(bitmask)在windows 串口事件驱动中的应用_windows返回bitmask的函数-程序员宅基地
- 【STL】stack & queue & priority_queue {栈,队列,优先级队列的介绍及使用;仿函数/函数对象;容器适配器,双端队列deque}_容器link、队列、栈、优先队列、bitset的使用方法-程序员宅基地
- Java泛型——限制可用类型_java 泛型 限制类型-程序员宅基地
- 冲刺港股IPO,速腾聚创「承压」-程序员宅基地
- C++中istringstream、ostringstream、stringstream详细介绍和使用_c++ istringstream-程序员宅基地
- Java面试之JUC系列: 阻塞队列详细解析_java实现阻塞队列面试-程序员宅基地
- WebUploader 大文件上传解决方案(500M以上)_webuploader 大小限制-程序员宅基地