
”urdf“ 的搜索结果
sdf转urdf,urdf查看robot模型

URDF优化_xacro笔记
文章目录\中的子标签:1.1 \ (option)\子标签有1.2 \(option) 描述link的外形\的子标签有\及子标签2.1 \ (optional)2.2 \ (required)2.3 \ (required)2.4 \ (optional 默认(1,0,0))2.5 \ (optional)2.6\ ...
1.Intro 交互式标记类似于先前教程中描述的“常规”标记,但是它们允许用户通过更改其位置或旋转,单击它们或从分配给每个标记的上下文菜单中选择某些内容来与它们进行交互。 它们由visualization_msgs / ...
内容概要:偶然做一个ROS项目但手上只有幻尔科技learm机械臂,发现网上没人做这个就自己做一下咯,主页还有另一个完整的learm机械臂ros控制程序,下了...阅读建议:①配合learm机械臂使用②ROS URDF相关基本配置完全
Unified Robot Description Format,简称为URDF(标准化机器人描述格式),是一种用于描述机器人及其部分结构、关节、自由度等的XML格式文件。一、创建第一个URDF文件将要创建的URDF文件描述的是一种最常见的移动机器人...
意思是这个拓展中的urdf渲染是由RobotWebTools来完成,可能是在安装时或者渲染时无法连接到这个RobotWebTools的网络导致的。执行 URDF Preview之后,虽然弹出了一个URDF Preview的窗口,但是这个窗口里面啥都没有。...
python中解析URDF文件的功能包有很多,最常用的可能是集成在ROS/ROS2中的urdf_parser_py,其次是KDL中将URDF转成KDL模型的kdl_parser,此外,webots官方的urdf2webots改改也能用~ 但是,以上功能包都太繁琐了,想要...
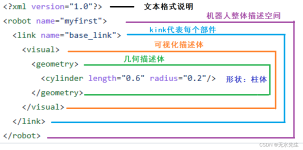

1.什么是URDF? URDF全称(United Robotics Description Format)统一机器人描述格式,是一个XML语法框架下用来描述机器人的语言格式,URDF在ROS界很流行。我们可以通过URDF对机器人建模然后放到ROS里面进行仿真与...
问题:sw2urdf插件自动生成的坐标系不符合我的使用需求,于是我在零件中自定义了坐标系,在装配体中,选择零件中的坐标系作为link的坐标系,但是在rviz中,机器人散架了。解决方法:在自定义link的坐标系、joint的...
ROS自学笔记十四:URDF语法详解
标签: 笔记
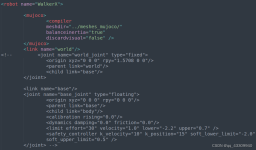
在这个例子中,`` 元素有一个名为 "my_joint" 的名称,表示关节的唯一标识符。`` 元素指定了连接到关节的父链接(`link1`),而 `` 元素指定了连接到关节的子链接(`link2`)。上述例子中,`` 标签包含了两个链接 (`...
ROS建模:一起从零手写URDF模型




先参考我上一篇博客需要先自己建立文件夹结构ROS创建机器人的urd模型、rviz可视化_杜嗨皮的博客-程序员宅基地先说一下我的文件夹结构这样你就容易理解我后边的步骤。

Pass parameters to xacro in launch file ... I had the same problem and solved it using the script but we found another way...
开源自主导航小车MickX4(四)底盘URDF模型1、底盘URDF模型1.1 URFD语法1.2 URDF语法绘制1.3 加载stl文件参考资料 1、底盘URDF模型 URDF(Unified Robot Description Format)是ROS中描述机器人外形尺寸的一种语言,...
首先,你需要创建一个符合 URDF 格式的 XML 文件,描述你的机器人模型的几何形状、连接、关节、传感器等信息。在 Gazebo 中加载你的 URDF 模型,可以使用 Gazebo 的命令行工具或编写一个简单的 launch 文件。你可以...
众所周知,URDF是ROS的原生支持格式,但是rviz不能提供复杂物理场景;因此在较复杂场景、带有物理属性(如风、摩擦力)的时候,采用Gazebo仿真时,因此使用SDF格式会更加合理。鉴于中文网络上几乎没有成体系的SDF...
python -m urdf2webots.importer --input=someRobot.urdf [--output=outputFile] [--normal] [--box-collision] [--tool-slot=linkName] [--help] -h, --help:显示帮助信息并退出。 --input=INPUT:指定要转换的 ...
官网地址:...Tutorial: Using a URDF in Gazebo The Universal Robotic Description Format (URDF) is an XML file format used in ROS to describe all elements of a rob...
ROS进阶---建立URDF模型
标签: 仿真器
ROS建立urdf模型 前期准备 1.ros-kinetic 2.ubuntu16.04 3.创建工作空间catkin_ws 建立urdf模型 1.进入工作空间中的src 功能包目录下 $ cd ./catkin_ws/src/ 2.输入创建功能包命令 $ catkin_create_pkg mbot_...
推荐文章
- withRouter,非根组件获取路由参数_withrouter 只能取到路由中的一个参数-程序员宅基地
- ubuntu环境下QT5操作摄像头报错,cannot find -lpulse-mainloop-glib cannot find -lpulse cannot find -lglib-2.0_cannot find–lpulse-程序员宅基地
- 用jbpm_bpel学jwsdp的ant方式使用-程序员宅基地
- 输入数字判断星期几_html获取当前星期几-程序员宅基地
- SpringBoot整合Activiti7——实战之放假流程(会签)_activit7中会签-程序员宅基地
- 阿里云服务器收到挖矿病毒的攻击,导致基础的文件被病毒污染的问题和对应的处理解决方法-程序员宅基地
- 北京东城区空调维修办法,格力变频空调出现ph,到底是怎么回事?_格力变频空调ph代码-程序员宅基地
- vscode编辑器使用拓展插件background添加背景图片改变外观_background vscode-程序员宅基地
- android 简单打电话程序_android拨打电话的程序-程序员宅基地
- 第二届中国(泰州)国际装备高层次人才创新创业大赛_泰州市双创人才计划2022-程序员宅基地