文章结构相关组件URDF(Unified Robot Description Format)——创建机器人模型Gazebo——搭建仿真环境Rviz(ROS Visualization Tool)——显示机器人各种传感器感知到的环境信息URDF集成RvizURDF相关语法...
”urdf“ 的搜索结果

Solidworks模型转化为URDF文件格式+三连杆机械臂示例+逆运动学 https://blog.csdn.net/gpeng832/article/details/73917487 关于SolidWorks导出URDF模型的总结 ... ...Rviz: Ro...
abb_irb1600id_support ABB IRB1600ID工业机器人的URDF、网格、配置文件等另请参阅引用此的 irb1600id moveit 配置
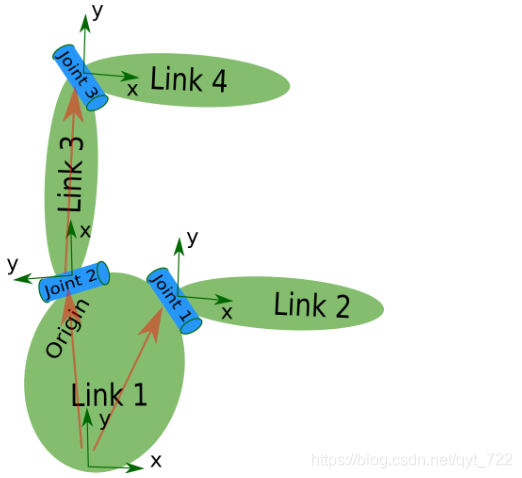
创建自己的URDF文件1.1创建树形结构文件在这部分教程中要创建的将是下面的图形所描述的机器人的urdf文件图片中这个机器人是一个树形结构的。让我们开始非常简单的创建这个树型结构的描述文件,不用担心维度等的问题...

机器人的组成3.URDF建模4.URDF机器人实战参考文献 1.机器人的定义 各个国家对机器人的定义各不相同,但总体上,机器人是指能够自动或通过编程的方式协助人类处理一些任务的机械装置。 2.机器人的组成 机器人通常可以...
ROS仿真小车(一)—— urdf模型+rviz可视化
2、urdf文件,参考官网添加相应的相机传感器。gazebo的urdf添加相机。ps,我这部分代码如下。可以看到相关的话题发布。可以看到相机的捕获画面。
URDF模型可在RVIZ中显示
标签: URDF
本人亲自建立的URDF模型,坐标选取已经颜色设定,初级菜鸟,大神们还望指教
ROS的gazebo仿真例程,纯urdf实现,实现差速轮式机器人在gazebo中运动,获取kinect点云数据
One of the codes of ros tutorial
采用URDF(Unified Robot Description Format)统一机器人描述格式,URDF使用XML格式描述机器人文件。列表包含了要安装到系统中的其他文件和目录,以及它们的安装路径。:关节(Joint),通过这两种组件即可完成对一...
这个文档详细描述了怎么能够显示在web界面的理解过程
如题,转化为URDF文件后,可以在Matlab或者Gazbo里面进行仿真

URDF_Xcaro
标签: python
xacro学习
ROS建模:从零手写机械臂的URDF模型

本教程展示如何在 Omniverse Isaac Sim 中导入 urdf。

原文链接SDFormat extensions to URDF (the 'gazebo' tag) — Documentation注意了ros2的gazebo部分已经跟ros1的gazebo部分不一样了:Toggle navigation BackEdit Version: 1.6 When URDF files are loaded by ...
ros机器人URDF

机器⼈建模与仿真(⼆)——机器⼈URDF模型仿真 机器⼈建模与仿真(⼆)——机器⼈URDF模型仿真 ⽬录 总述 在ROS中,机器⼈的模型⼀般放在RobotName_description功能包下。 ⼀、创建机器⼈描述功能包 catkin_create_...

urdf机器人基础建模
标签: ubuntu
目录一、URDF简介二、URDF机器人建模实现参考资料 一、URDF简介 组成 连杆 (link) 关节 (joint) 整个机器人可以是 n个link + n个 joint组成 1.1 link标签 描述机器人某个刚体部分的外观和物理属性(尺寸...
ROS2-URDF建模
标签: 机器人
ROS2学习笔记,使用URDF文件搭建自己的仿真机器人
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地