”urdf“ 的搜索结果

urdf2webots 此工具将URDF文件转换为Webots PROTO文件。安装从点子pip install urdf2webots在macOS上,将pip二进制路径导出到PATH: export PATH="/Users/$USER/Library/Python/3.7/bin:$PATH"从来源git clone ...
库卡kr20的urdf文件
标签: 库卡 urdf
库卡kr20的urdf文件,使用sw2019进行导出,ros的测试环境为Ubuntu18.04,测试可用,具体的调试可以后期自己慢慢调 注意:如果不会使用,谨慎下载
urdf_parser_py 开发设置 您必须手动运行setup.py 。 对于catkin开发,您可以通过以下方式安装到$ ws /../ build / lib / pythonX.Y / dist-packages devel_prefix=$(cd $(catkin_find --first-only)/.. && pwd) cd...
URDF文件中使用XML格式描述的机器人模型,下面介绍URDF的XML标签。joint 描述关节的运动学和动力学属性,并指定了关节的安全极限。link 元素用于描述具有惯性、视觉特征和碰撞属性的刚体。机器人描述文件中的根元素...
动力学仿真:Gazebo支持多种高性能的物理引擎,如ODE、Bullet、SimBody和DART,能够进行精确的动力学计算和仿真。三维可视化环境:它提供了一个逼真的三维环境,包括光线、纹理和影子,使得仿真场景更加接近现实。...
机器人操作系统ROS(十):机器人建模
履带底盘urdf文件
SolidWorks 到 URDF 导出器是一个 SolidWorks 插件,可以方便地将 SW 零件和装配体导出到 URDF 文件中。导出器将创建一个类似 ROS 的包,其中包含网格、纹理和机器人(urdf 文件)的目录。对于单个 SolidWorks 零件...
【代码】ros2 RVIZ2 不显示urdf模型。
(一)基于虚拟机ubuntu18的机器人系统仿真(rviz、urdf、xacro)
文章目录前言一、功能作用说明URDFSRDF二、样例文件说明URDF文件例子SRDF文件例子总结 前言 URDF全称为Unified Robot Description Format,中文可以翻译为“统一机器人描述格式”。与计算机文件中的.txt文本格式、....

realtime_urdf_filter 该软件包为深度图像提供了基于OpenGL的,基于着色器的加速过滤。 场景几何是在URDF模型中定义的,还有定义摄像机位置和过滤参数的参数。 只要TF延迟不是太高,静态环境模型和铰接式机器人模型...
1、资源内容:基于Matlab实现自由度机械臂仿真模型使用solidworks导出urdf格式 simscape工具箱(源码+使用说明+数据) 2、适用人群:计算机,电子信息工程、数学等专业的学习者,作为“参考资料”参考学习使用。 3、...
(二)基于虚拟机ubuntu18的机器人系统仿真(rviz、urdf、xacro)-机器人
limit用来限制关节上下位的限制(lower、upper的单位为弧度,上图中即表示关节的运动弧度从-180到+180,velocity单位(若为旋转则为弧度每秒,平移为米每秒)数学计算:${(motor_length+wheel_length)/2} 0" rpy="0 ...
URDF 文件是一个标准的 XML 文件关于gazebo标签,后期在使用 gazebo 仿真时,才需要使用到,用于配置仿真环境所需参数,比如: 机器人材料属性、gazebo插件等,但是该标签不是机器人模型必须的,只有在仿真时才需设置...
1.什么是URDF? URDF全称(United Robotics Description Format)统一机器人描述格式,是一个XML语法框架下用来描述机器人的语言格式,URDF在ROS界很流行。我们可以通过URDF对机器人建模然后放到ROS里面进行仿真与...
Denavit Hartenberg表到统一机器人描述格式 ... 转换后的代码给出了放置在Denavit-Hartenber参考系上的轴(作为URDF圆柱体)。 然后可以使用此元素来创建完整的URDF。 在同伴网站,您可以查看URDF并使用联合值。
Phobos导出URDF , SDF或SMURF之类的格式以及常见的网格格式(立体光刻(.stl), Wavefront (.obj)或Collada (.dae))。 Phobos与不来梅一起在不来梅的机器人创新中心发起,目前正在开发中。 如果有任何疑问...
kinect信息仿真以及显示
知道了机器人的基本构成之后还不够,还需要知道基本组成部分的一些物理信息,例如连杆的质量属性,惯量属性,颜色,以及关节的种类,这到底是转动关节还是平动关节。同理设置第二个连杆:1——设置连杆名字——2设置...
Franka robot Franka Emika Panda机器人的URDF and meshes 文件
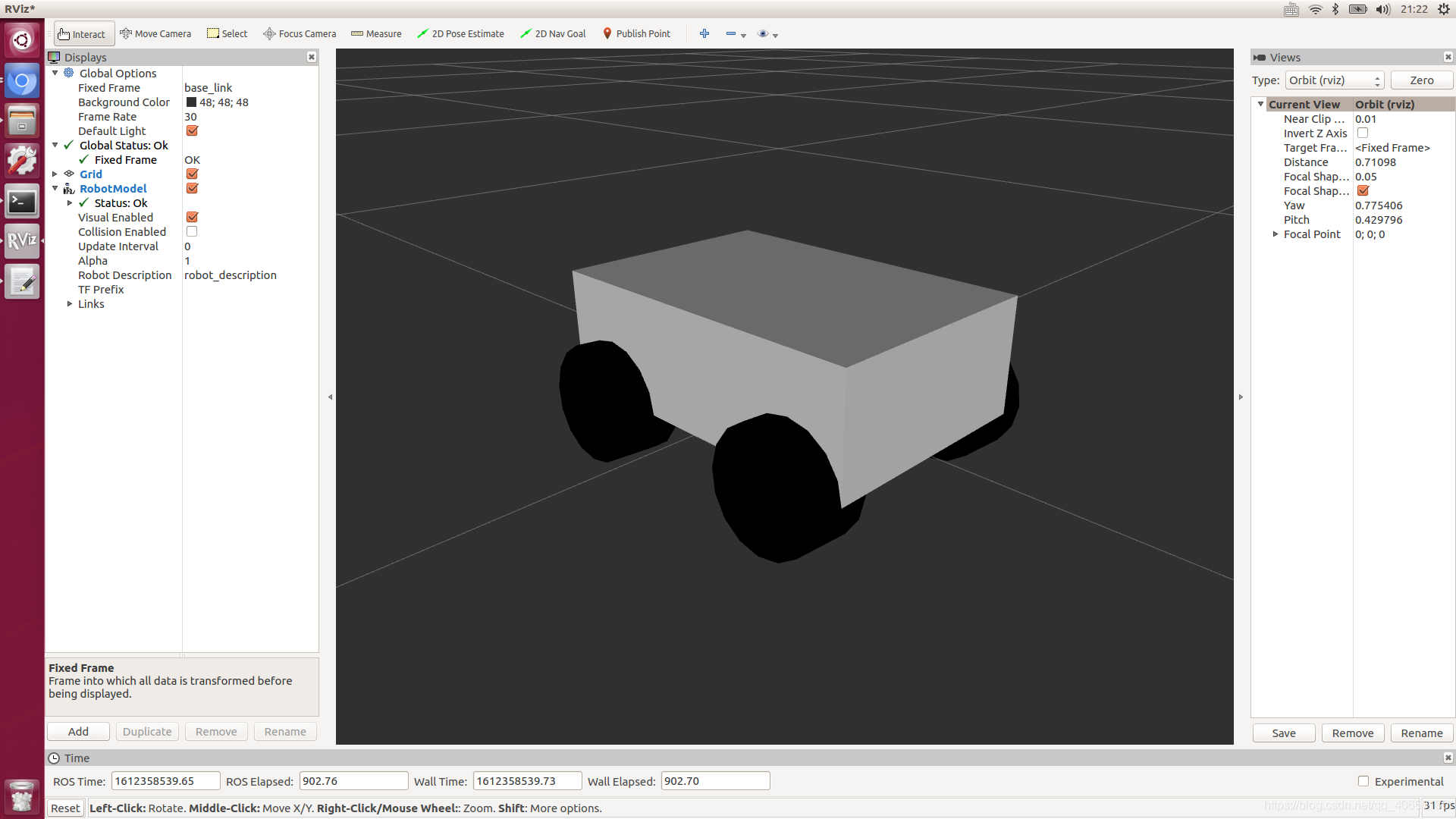
通过URDF自定义四轮小车模型
标签: 学习
通过URDF自定义四轮小车模型,即博客ROS学习(七)对应源码,博客地址:https://blog.csdn.net/u011832219/article/details/114936519
雷达与摄像头信息仿真以及显示
详细说明了urdf文件的编写结构,给出了两个简单的例子进行讲解
ur3_URDF文件,xacro.zip,使用Solidworks导出的URDF文件
推荐文章
- python读取raw数据文件_numpy – 使用python打开.raw图像数据-程序员宅基地
- Splunk分布式部署简介_splunk部署-程序员宅基地
- 基于鲸鱼优化算法WOA,哈里斯鹰算法HHO,灰狼算法WOA,算术优化算法AOA实现13类工程优化工程问题求解附matlab代码_aoa-hho算法-程序员宅基地
- FreeMarker(三)简单使用-程序员宅基地
- Qt + Opencv 实现的一个简单文字识别的demo_qt opencv字符识别-程序员宅基地
- CMakeLists.txt demo-程序员宅基地
- docker启动容器报错 Unknown runtime specified nvidia._docker: error response from daemon: unknown runtim-程序员宅基地
- spring cloud feign组件简单使用_"@feignclient(name = \"user-provider\",fallback = -程序员宅基地
- Android心得4.3--SQLite数据库--execSQL()和rawQuery()方法_android sqlite rawquery-程序员宅基地
- Spring MVC 学习笔记 第四章 Spring MVC 模型数据解析_spring mvc模型数据解析笔记-程序员宅基地