
”ros_control“ 的搜索结果
ROS控制样板简单的仿真界面和模板,用于为ros_control设置硬件界面。 想法是您以此为起点来创建您的硬件接口,这是必需的,因为很少。 该样板演示: 创建用于与ros_control一起使用的多个关节的hardware_interface ...
ros_control 请参阅上的ros_control建置状态靛青动能月球旋律理性的基于源的安装的分支ROS靛蓝ROS动力学ROS月球ROS旋律ROS Noetic 靛蓝开发动能发展动能发展旋律发展新奇发展出版物如果您认为这项工作有用,请通过...
ros_control通过服务调用加载和启动控制器创建您自己的硬件接口
3.添加后在rviz左面看到robot_description 里面的topic设置成/robot_description。E: 无法获得锁 /var/lib/apt/lists/lock。N: 请注意,直接移除锁文件不一定是合适的解决方案,且可能损坏您的系统。...
摆烂才是王道
在文中,我们将了解一个有用的软件包ros_control,但它难以理解。我们将首先简要了解什么是控制及其在机器人技术中的重要性。然后了解ros_control包如何派上用场来控制我们的机器人。让我列出我们将要讨论的主题。...
Gazebo ros_control 接口 这是一个用于将ros_control控制器架构与模拟器集成的 ROS 包。 这个包提供了一个 Gazebo 插件,它实例化一个 ros_control 控制器管理器并将它连接到一个 Gazebo 模型。 Gazebo 的网站上...
ros_controllers 请参阅和文档建置状态靛青动能月球旋律理性的基于源的安装的分支ROS靛蓝ROS动力学ROS月球...( ) @article{ros_control,author = {Chitta, Sachin and Marder-Eppstein, Eitan and Meeussen, Wim an
报错如下: CMake Error at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package): Could not find a package configuration file provided ... "gazebo_ros_control" with any of the foll...
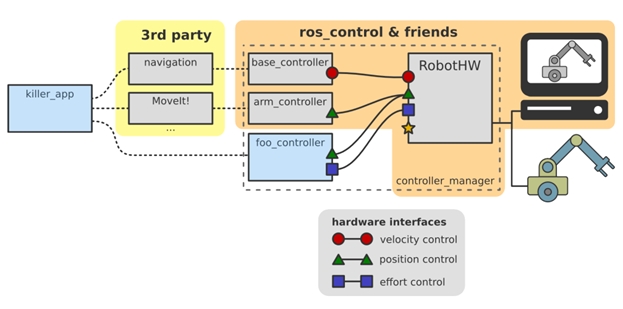
文章目录系列文章目录前言一、ros_control目的二、ros_control架构1、控制器管理器2、控制器3、硬件抽象层4、硬件资源5、真实机器人的执行器三、ros_control的Gazebo运动控制实现流程1.gazebo 已经实现了 ros_...
ros_control 介绍来源优势缺点基本架构简单实例 来源 ros_control 脱胎于pr2 的 硬件封装层部分 pr2_mechanism,经过pal-robotics 和 hidof 两个公司的工程师进行了改写,变得适用于所有机器人的硬件封装库,负责...

文章目录1. Controllers2.... gazebo_ros_control添加传动系统添加gazebo_ros_control插件默认gazebo_ros_control行为自定义gazebo_ros_control插件 1. Controllers sudo apt-get install ros-me
mav_control_rw 功能包是ETHZ ASL的利用mpc控制实现了旋翼式无人机的轨迹追踪算法。mpc是模型预测控制的简称,全称是Model-based Predictive Controlmpc利用一个已有的模型、系统当前的状态和未来的控制量,来预测...
ns是ros下的命名空间机制。arg标签是用来在launch文件中声明参数的,在launch中声明过的参数都可以在启动launch文件时传入已声明过的参数。param和arg的区别在于,param声明的变量是节点所接收的,而arg的参数是...
ROS Gazabo仿真问题解决: No p gain specified for pid. Namespace: /gazebo_ros_control/pid_gains/~
这里可以发现:这个tf2相关的包可以实现转换坐标的功能,而上一个代码中广播也可以(不过手动),这两个对比起来,tf2更为专业,可以使用少量代码实现相同功能。这里使用的是topic通信,主要实现原理是:turtle运动...


type: position_controllers/JointGroupPositionController // ros2_control 里面定义的控制器type: joint_state_broadcaster/JointStateBroadcaster //固定的joints:- Joint_1 // 注意和机械臂的urdf中定义的关节角...
探秘ROS Control:机器人操作系统中的控制框架 项目地址:https://gitcode.com/ros-controls/ros_control ROS Control是Robot Operating System(ROS)中的一个核心模块,它提供了一个强大的、灵活的控制系统设计...
此包装的支持已结束 抱歉,要维护的东西太多了。 使用风险自负。 Baxter SSH-在Baxter内部运行 Baxter SDK的C ++版本与Rethink SDK一起使用。 这是包含Baxter控制器的ros_control实现的基本软件包...control_toolbox -b
ros_control 框架论文,概述、精炼,适合初步了解ros控制架构。
本篇的目的是想解读gazebo_ros_control 以及 gazebo_ros. 因为gazebo本身是独立于ros的,通过教程Intermediate: Control plugin以及教程Category: Write a plugin发现自己单纯的写c++ plugin就能控制model,获取...
现场 rqt_graph 在一个陌生的框架下写代码,免不了有很多疑问与槽点。...不了解框架结构,千头万续,无从下手,说不清,理还乱。...ros_control是个什么东西? http://www.360doc.com/content/
用于为 ros_control 设置硬件接口的简单模拟接口和模板。这个想法是你把它作为创建硬件接口的起点,它是必要的,因为ros_control 文档很少。这个样板展示了: 为多个关节创建一个hardware_interface,以便与ros_...
9.浅谈ROS_control
标签: 线性代数

hardware_node参数〜control_frequency (双精度,默认值:10.0) 控制步骤的频率(从层读取,更新控制器以及写入层)以Hz为单位〜use_expected_period (bool,默认值:false) 如果为true,则在读取/写入层时,...
推荐文章
- Codeforces-学校排队-程序员宅基地
- 计算机毕业设计ssm基于JAVA的图书馆自习室座位预约系统194fd9 (附源码)轻松不求人_基于ssm的图书馆预约座位-程序员宅基地
- 实值复变函数求导 ——(Wirtinger derivatives)_wirtinger导数-程序员宅基地
- VMWare虚拟机设置固定IP上网方法_vm虚拟机只允许指定ip访问-程序员宅基地
- 深度学习修炼(一)线性分类器 | 权值理解、支撑向量机损失、梯度下降算法通俗理解-程序员宅基地
- 基于SpringBoot的社区团购APP+02043(免费领源码)可做计算机毕业设计JAVA、PHP、爬虫、APP、小程序、C#、C++、python、数据可视化、大数据、全套文案-程序员宅基地
- 如何在无公网IP环境下远程访问Serv-U FTP服务器共享文件-程序员宅基地
- uniapp的navigateTo页面跳转参数传递问题_uni.navigateto刷新携带参数丢失-程序员宅基地
- C++中std::getline()函数的用法-程序员宅基地
- vue 工作中的一些小总结(基础知识供刚入门的小伙伴看 vue+elementUi+vsCode+vue-router+iconfont )_mac+elementui+vscode-程序员宅基地