记录了日常使用时,对ros1与ros2的区别的一些笔录,希望对有需要的人有所帮助(^_^) 如果有写的不对的地方还望大家指正,共同学习。
”ros1和ros2区别“ 的搜索结果
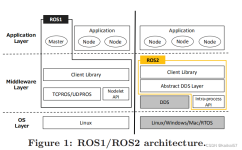
2.平台单一:ROS1基于linux系统,在其他系统中无法安装和使用。 3.实时性差:ROS1缺少实时性方面的设计。 4.稳定性差:ROS1中的节点依赖于ROS Master,一旦节点管理器崩溃,系统将无法订阅和发布主题。 ...
ros1和ros2的区别,要点记录
学习了解ROS1和2 的区别
ROS1的通信机制是每个节点通过ROS Master发送和接收话题消息。无实时性(real-time)嵌入式设备不友好对于网络通信的重依赖(需要高带宽且稳定的网络连接)多用于学术应用原生的 ROS 仅支持单机器人超高的灵活性带来的不...


每版的Ubuntu系统版本都有与之对应ROS版本的,每一版ROS都有其对应版本的Ubuntu版本,不可随便装,ubuntu20.04对应ROS1 noetic和ROS2 foxy版本。
ROS1和ROS2的区别
标签: 其他
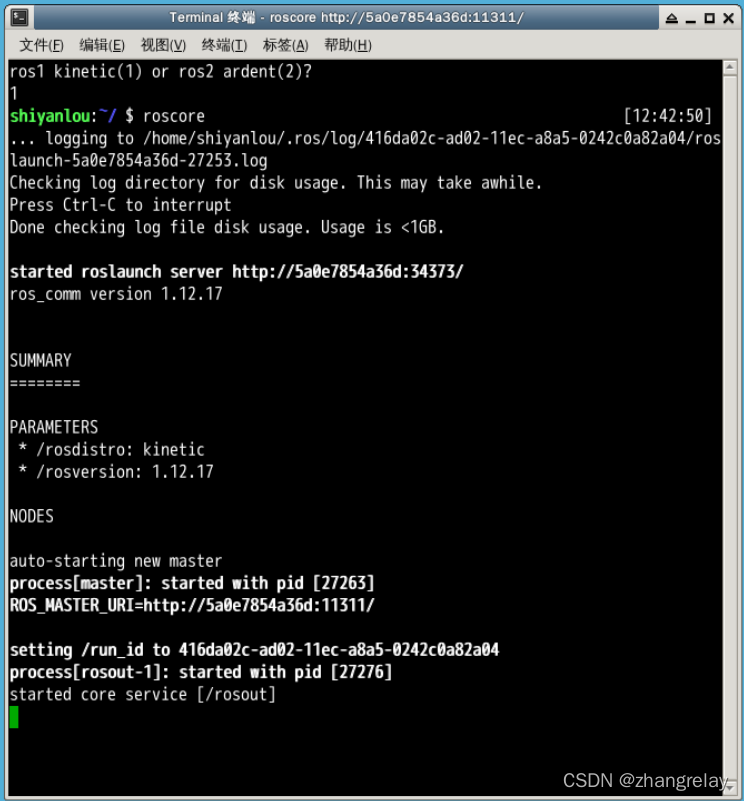
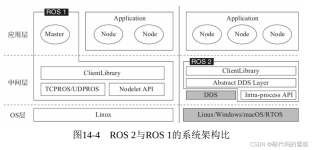
ROS2使用基于DDS的Discovery机制,和Master说拜拜,不需要使用roscore来启动Master,直接启动节点即可。 2、API重新设计 ROS1中的大部分代码都基于2009年2月设计的API。 ROS2重新设计了用户API,但使用方法类似,ROS2...
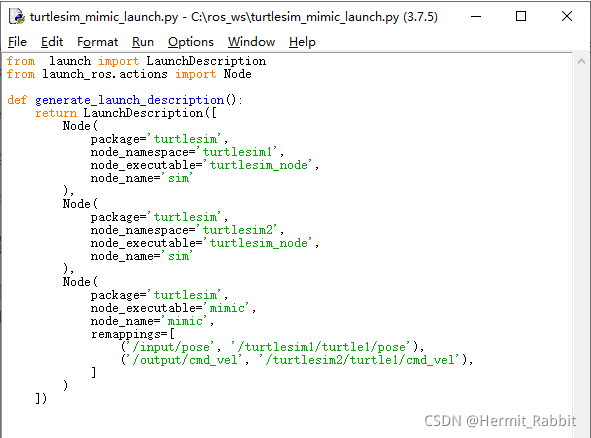
在处理launch过程中,ROS1和ROS2还是有些差别的,因为文件结构不同,不能直接搬用。这里将两者建立过程做一个比对,以提升概念的清晰度。在ROS2中,单独的launch文件是一个python文件,因此脱离ros2环境也能启动,...
凭借在建立ROS 1作为机器人研发的事实上的全球标准方面的十年经验,ROS 2从一开始就被建立在工业级 基础上并可用于生产,包括高可靠性和安全关键系统。 ROS 2的设计选择、开发实践和项目管理基于行业利 益相关者的...
ros1的rosbag和ros2的rosbag互换

为什么用ros2.00.概述1.基本概念基本概念:ROS... ros1 和ros2的通信模型 0.概述 其实是为了解决ros1中的一些问题 主要是从下面几个文章整过来 古月居的博客https://www.guyuehome.com/805 Why ROS 2? http://desi...
ROS安装版本: Noetic 清华源 sudo gedit /etc/apt/sources.list #清华源 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ bionic main restricted universe multiverse deb ...




文章信息:标题:ROS1/ROS2版本代号原文地址:https://fishros.org.cn/forum/api/topic/96关键词:一键安装,版本代号,参与者:,版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。
ROS2学习(1)ROS2简述
标签: ROS2
目录概述安装ROS21)安装python3及colcon2) 添加ROS2的源3)安装eloquent桌面版本4)修改~/.bashrc2 安装cartographer及cartographer_ros1) 安装cartographer2) 安装cartographer_ros3. 测试cartographer1) 创建...
大家好,我是今天的翻译官小鱼。今天给大家带来一篇...ROS2目前正在 Ubuntu Xenial、OS X El Capitan以及 Windows10上进行 CI 测试和支持(见ci.ros2.org) 1.2 语言 C++标准 ROS1 的核心是瞄准 C++03,并且在其 API
ubuntu20.04 安装ROS2 和ROS1共存 笔者是在已经装好ROS1的系统下安装ROS2。 1.安装ROS2 设置编码 $ sudo locale-gen en_US en_US.UTF-8 $ sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 $ export LANG=...
这使得在同一系统上安装和使用ROS1和ROS2成为可能。2.ROS1和ROS2之间的交互可以通过ROS1-ROS2桥实现。因此,用户可以将ROS1的现有软件包转换为ROS2,以充分利用ROS2提供的新功能和性能。2.使用两个框架需要额外的...
推荐文章
- 手写一个SpringMVC框架(有助于理解springMVC) 侵立删_springmvc可以用来写安卓后端吗-程序员宅基地
- 线性判别分析LDA((公式推导+举例应用))_lda推导-程序员宅基地
- C# 结构体(Struct)精讲_c# struct-程序员宅基地
- 支付宝Wap支付你了解多少?_阿里wap支付-程序员宅基地
- Java计算器编写,实现循环输入_java简易计算器可使用户多次输入-程序员宅基地
- 【多维Dij+DP】牛客小白月赛75 D-程序员宅基地
- Android之内存优化与OOM-程序员宅基地
- Azure Machine Learning - 视频AI技术_azure ai 視頻索引器-程序员宅基地
- 个人知识管理软件使用感受-程序员宅基地
- WWDC2019 ------深入理解App启动_wwdc app启动-程序员宅基地