
”ros1“ 的搜索结果
ROS1学习记录!!
ROS1Melodicwin10桌面完全版安装包 解压双击tools下,setup进行安装,其他库参考官方文档
ROS1 & ROS2相关知识
标签: 数学建模
ROS1只⽀持基于TCP的通信,通过配置QoS,ROS2可以表现出TCP的可靠性,也可以表现出UDP那样的⾼实时性。,DDS(Data-Distribution Service)是⼀种⽤于实时和嵌⼊式系统发布-订阅式通信的⼯业标准,这种点到点的通信...
根据要求自定义即可。
【ROS】ROS1导航(了解)
标签: ROS
1)sensor transforms:坐标转换,机器人使用tf发布有关坐标系之间的关系2)sensor sources:依靠传感器信息来避开障碍物,通过 ROS发布sensor_msgs/LaserScan或sensor_msgs/PointCloud消息来获取3)odometry source...
此工程为基于 apollo 1.0.0 的ros1移植版本,移植主要目的如下: - 学习apollo框架设计 - 学习apollo中的控制算法 目前移植版本与原有版本改动点如下: - 使用原生ros(基于noetic)替代apollo中更改的ros - 使用...
每版的Ubuntu系统版本都有与之对应ROS版本的,每一版ROS都有其对应版本的Ubuntu版本,不可随便装,ubuntu20.04对应ROS1 noetic和ROS2 foxy版本。
ros1和ros2的区别,要点记录
Debian发行版^_^AI:在Ubuntu 22.04上安装ROS1是可行的,但需要注意ROS1对Ubuntu的支持只到20.04。因此,如果要在22.04上安装ROS1,只能从源码编译安装。目前的机器人相关操作系统还是面向开发者的(developer)。与...
ROS1迁移到ROS2基础教程
标签: c++
将 ROS 1 包转换为 ROS 2包例子前言一、ROS1代码1. ros1工作空区的目录布局2. 代码2.1 src/talker/package.xml2.2 src/talker/CMakeLists.txt2.3 src/talker/talker.cpp3. 构建 ROS 1 代码4. 运行 ROS 1 节点4.1 ...
ubuntu 22.04 apt-get 安装 ros1 ros Noetic 最新版

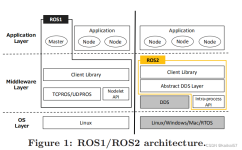
ROS1采用分布式框架,其架构可以分为三个层次:基于Linux系统的OS层,实现ROS核心通信机制以及众多机器人开发库的中间层;在ROS Master的管理下保证功能节点的正常运行的应用层。ROS1的通信机制是每个节点通过ROS ...
ros1的rosbag和ros2的rosbag互换
机器人操作系统ROS是使用最广泛的机器人中间件平台。它在机器人社区中使用了10多年,无论是在业余爱好者领域还是在工业领域。ROS可用于各种微控制器和计算机,从Arduino到...本文介绍ROS2和ROS1的项目尝试和结论。

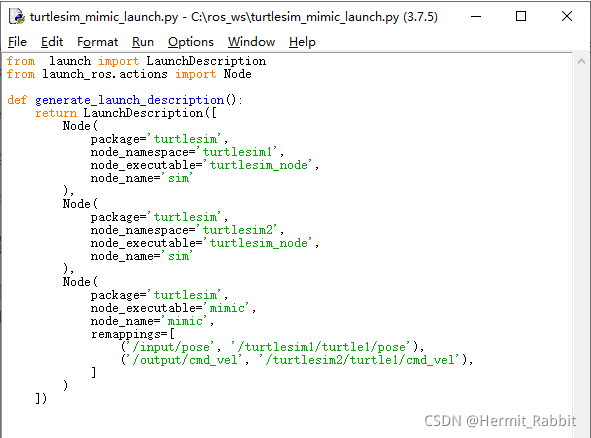
在处理launch过程中,ROS1和ROS2还是有些差别的,因为文件结构不同,不能直接搬用。这里将两者建立过程做一个比对,以提升概念的清晰度。在ROS2中,单独的launch文件是一个python文件,因此脱离ros2环境也能启动,...

在ros2下使用ros1_bridge与ros1自定义消息桥接 示例环境 操作系统:ubuntu 20.04 amd64 ros版本:noetic ros2版本:foxy
目录概述安装ROS21)安装python3及colcon2) 添加ROS2的源3)安装eloquent桌面版本4)修改~/.bashrc2 安装cartographer及cartographer_ros1) 安装cartographer2) 安装cartographer_ros3. 测试cartographer1) 创建...

背景:项目需要,一直折腾把ros1下面的包升级到ros2版本,没有熟人带路,纯属个人查找资料摸索,自我理解所得,有错误的地方,望大佬们不吝赐教. 1.消失的句柄 ros1: ros2: 参考链接: 2.接口文件(msg/srv)...
ROS 1 的迁移到ROS 2指南前言一、先决条件二、迁移步骤1.Package manifests2.元功能包Metapackages3.消息、服务和操作定义4.构建系统 Build system5.编译工具 Build tool6. 纯 Python 包6.更新 CMakeLists.txt 以...
今天给大家带来一篇文章,详细描述了ROS2相对ROS1做出了哪些改变?看完之后,小鱼自感收获颇深,希望大家也能有所收获。 一、平台依赖 1.1 平台 ROS1只在ubuntu进行 CI 测试。但ROS社区的中也做了对其他linux发行版...
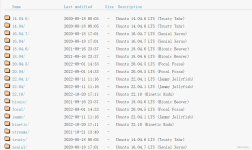
文章信息:标题:ROS1/ROS2版本代号原文地址:https://fishros.org.cn/forum/api/topic/96关键词:一键安装,版本代号,参与者:,版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。
推荐文章
- 什么是ABA问题及ABA问题的解决方法。-程序员宅基地
- muduo库的Singleton类剖析_muduo网络库中的sinleton类是干嘛的-程序员宅基地
- attach java_【JAVA新生】nio attach引发的问题-程序员宅基地
- 位掩码(bitmask)在windows 串口事件驱动中的应用_windows返回bitmask的函数-程序员宅基地
- 【STL】stack & queue & priority_queue {栈,队列,优先级队列的介绍及使用;仿函数/函数对象;容器适配器,双端队列deque}_容器link、队列、栈、优先队列、bitset的使用方法-程序员宅基地
- Java泛型——限制可用类型_java 泛型 限制类型-程序员宅基地
- 冲刺港股IPO,速腾聚创「承压」-程序员宅基地
- C++中istringstream、ostringstream、stringstream详细介绍和使用_c++ istringstream-程序员宅基地
- Java面试之JUC系列: 阻塞队列详细解析_java实现阻塞队列面试-程序员宅基地
- WebUploader 大文件上传解决方案(500M以上)_webuploader 大小限制-程序员宅基地