ORB-SLAM2源码学习(一)
标签: slam
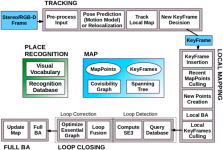
一、跟踪线程 参考关键帧跟踪:地图初始化成功那一帧是参考关键帧,直接使用上一帧 恒速模型跟踪:上一帧的位姿和速度相乘计算得到当前帧 重定位跟踪:跟踪丢失时使用, 局部地图跟踪:使跟踪更加准确 ...
标签: slam
一、跟踪线程 参考关键帧跟踪:地图初始化成功那一帧是参考关键帧,直接使用上一帧 恒速模型跟踪:上一帧的位姿和速度相乘计算得到当前帧 重定位跟踪:跟踪丢失时使用, 局部地图跟踪:使跟踪更加准确 ...
阅读PTZ-SLAM的过程中记录下自己学习过程中查询到的方法,明晰方法原理。
基于mathlab的fastslam实现教程源代码。
该代码是利用lsd技术实现的slam的C++代码,学习slam的朋友值得参考
ORB-SLAM3是一种基于特征点的稀疏实时单目SLAM(Simultaneous Localization and Mapping)系统。它是ORB-SLAM系列模型的第三代版本,用于在无人机、机器人和增强现实等领域中进行实时定位和建图。ORB-SLAM3使用了一...
slam十四讲源代码——SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。问题可以描述为:将一个机器人放入未知环境中的未知...
将不定期更新,或者有好的,大家评论我更新 MonoSLAM 单目https://github.com/hanmekim/SceneLib2 ...ORB-SLAM 单目为主http://webdiis.unizar.es/~raulmur/orbslam/ LSD-SLAM 单目为主http://visio...
机器人SLAM算法源代码.7z
经过一番努力,终于跑通了felix.endres的rgbd slam v2 源码,中间遇到挺多问题。总结如下: (1)关于SiftGPU问题:ERROR: SiftGPU cannot be compiled解决方法:将源码中CMakeLists.txt中第6行:set(USE_SIFT_GPU1...

创建一个SLAM系统2.1 创建SLAM系统2.2 创建一个节点的句柄,并发布话题2.3 对于所有图片2.3.1 加载RGB图像,深度图和时间戳2.3.2 检查图片是否加载成功2.3.3 (重点关注)在一个while循环里面遍历数据集里面的每一幅图片...
标签: 14讲
源代码+视觉SLAM14 资料
1、资源内容:基于MATLAB和GAZEBO实现的激光slam仿真+源代码+文档说明 2、代码特点:内含运行结果,不会运行可私信,参数化编程、参数可方便更改、代码编程思路清晰、注释明细,都经过测试运行成功,功能ok的情况下...
matlab的egde源代码GP-SLAM GP-SLAM是用于连续时间轨迹估计和映射的库增强型稀疏高斯过程(GP)回归。 核心库是用C ++语言开发的,还提供了一个可选的Matlab工具箱。 Matlab脚本中提供了示例。 GP-SLAM由Georgia ...
FastSLAM源代码(包含FastSLAM1和FastSLAM2)
1.版本:matlab2014/2019a/2021a,内含运行结果,不会运行可私信 2.领域:智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,更多内容可点击博主头像 ...
1.版本:matlab2014/2019a/2021a,内含运行结果,不会运行可私信 2.领域:智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,更多内容可点击博主头像 ...
源代码 MRPT 应用程序的示例配置文件可以在以下位置找到: 一些示例数据集存储在: . 更完整的数据集存储库是 . 使用您的新功能、错误修复等代码。 3.编译 3.1五秒指令 调用cmake-gui并选择: source在哪里--> ...
SLAM技术是机器人技术的一个重要内容,机器人在没有先验条件环境下的运动需要SLAM技术的支持。本资源为coreSLAM,也称tiny SLAM,是激光SLAM算法的一种,旨在用少量代码实现高效率是实时建图和定位。
要从源代码编译,请按照 ubuntu 上的命令: cd isam mkdir build && cd build && cmake .. make 有关该库的更多详细信息,请参阅 isam 下的 readme 文件文件夹。 两阶段选择脚本 文件夹focused_mapping 包含我们的两...
标签: 自动驾驶
matlab的egde源代码SFM-AR-Visual-SLAM 视觉SLAM 葛兰素史克 支持基于特征或直接方法的通用SLAM框架,可以处理不同的传感器,包括单眼相机,RGB-D传感器或任何其他输入类型。 OKVIS:打开基于关键帧的视觉惯性SLAM ...
标签: 经验分享
标签: slam

单线激光雷达SLAM建图与路径规划 使用的硬件:autolabor pro1小车、小觅双目相机(S1030标准版本)、IntelNUC迷你主机、显示器、2D激光雷达 Delta-1A 使用的软件:ubuntu 16.04 LTS、ROS-kinetic、小觅驱动、...
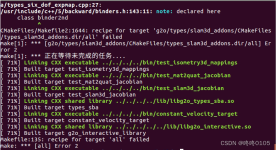
将include与src文件夹下的代码替换为了泡泡机器人注释版的orbslam2,可安装orbslam2官网正常编译运行
在线语义视觉SLAM基础:C++语言程序中调用Python实现的图像分割网络、获取分割结果+源代码+文档说明 - 不懂运行,下载完可以私聊问,可远程教学 该资源内项目源码是个人的毕设,代码都测试ok,都是运行成功后才上传...
paddleRobotics是基于paddle的机器人开源算法库集,包括人机交互、复杂运动控制、环境感知、slam定位导航等开源算法部分。 人机交互 主动多模交互技术TFVT-HRI 主动多模交互技术是通过视觉、语音、触摸传感器等输入...
matlab的egde源代码概述 MATLAB中的SLAM模拟器使用图形界面进行可视化,并允许手动绘制房间和障碍物。 有关该软件的视频和更多信息的示例,请访问: 版权信息 该软件由Jai Juneja编写和开发,是牛津大学工程科学系...