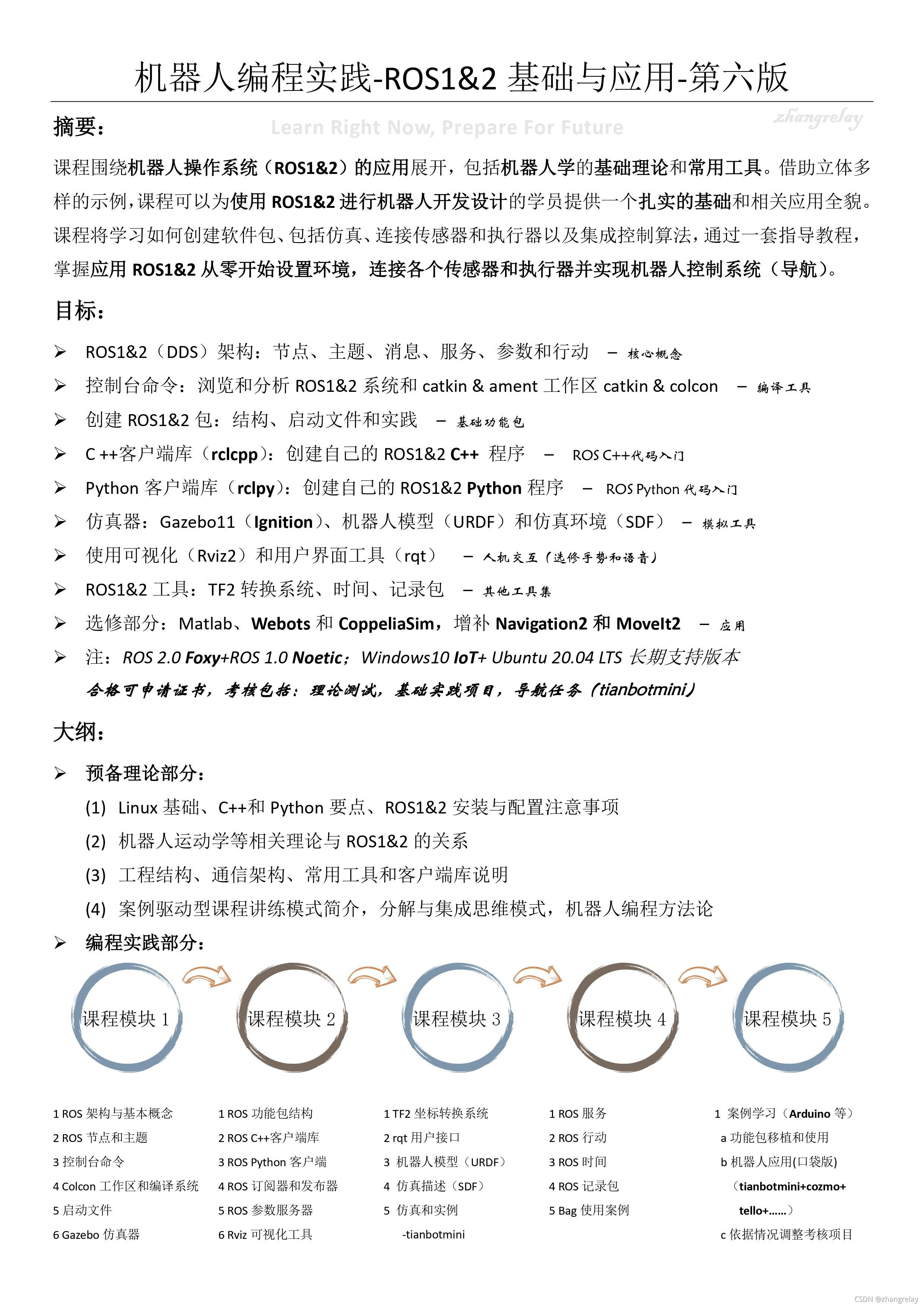
在本教程中,您将学习如何在 ROS 2 系统中导航。此外,您将启动您的第一个 ROS 2 节点并创建您自己的 ROS 工作区以用于进一步的教程。您可以使用文档中的给定链接获取更多信息。
”ROS2“ 的搜索结果
要启动ROS2中的rosbridge,需要先安装ROS2的rosbridge_suite软件包。安装完成后,再次尝试启动rosbridge_server,应该就不会再出现这个错误了。替换为正在使用的ROS2发行版的名称,我的开发板是。
在处理launch过程中,ROS1和ROS2还是有些差别的,因为文件结构不同,不能直接搬用。这里将两者建立过程做一个比对,以提升概念的清晰度。在ROS2中,单独的launch文件是一个python文件,因此脱离ros2环境也能启动,...



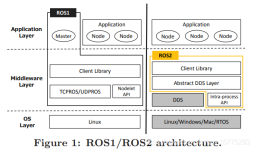
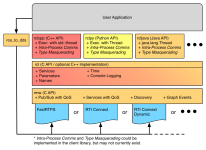
ROS1采用分布式框架,其架构可以分为三个层次:基于Linux系统的OS层,实现ROS核心通信机制以及众多机器人开发库的中间层;在ROS Master的管理下保证功能节点的正常运行的应用层。ROS1的通信机制是每个节点通过ROS ...
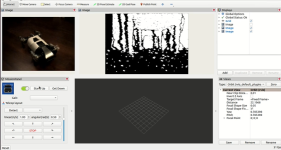
如何建立ROS2的导航地图?在ROS2的服务器中,其中有一个地图服务器,该服务器与参数服务器类同,当外界节点请求的时候,将新的地图导入导航系统中。注意,这里新的地图就是因为场景足够大时,一张地图覆盖不了物理...



ROS2安装教程,Foxy安装教程,在Ubuntu下安装ROS2
到了这一节,终于可以开始安装ROS2了。小鱼接下来会讲的比较细一些,帮助一些没有基础的同学进行安装。 首先启动虚拟机或者启动双系统中的ubuntu。 小鱼最新一行代码安装ROS2: wget ...
我们在开发ROS2程序时会发现,当面对只有一个node节点时,程序的调用是线性的,这个时候就会有两种解决方式,一种就是使用rclcpp_components来完成对子节点的注册,并完成类似ROS1中Nodelets的操作。另外一种就是...

官方文档。


ROS 2 Foxy 安装手册和踩过的坑官方流程准备工作魔术工具更换国内源安装前提系统要求安装选择安装流程设置语言区域设置源安装ROS2包环境配置验证样例参考 之前写过一篇18.04下安装ROS2E的手册,最近要用Moveit2了,...

Visual Studio Code,简称VSCode,是微软在2015年推出的一个轻量但功能强大的源代码编辑器,支持 Windows、Linux和 macOS操作系统,扩展组件非常丰富,可以快速搭建成为项目开发的神兵利器。
ROS2的每个版本都有其特点和改进。
ROS2 基础概念 服务
标签: ROS2

推荐文章
- C++语法基础--标准库类型--bitset-程序员宅基地
- [C++] 第三方线程池库BS::thread_pool介绍和使用-程序员宅基地
- 如何使用openssl dgst生成哈希、签名、验签-程序员宅基地
- ios---剪裁圆形图片方法_ios软件圆形剪裁-程序员宅基地
- No module named 'matplotlib.finance'及name 'candlestick_ochl' is not defined强力解决办法-程序员宅基地
- 基于java快递代取计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署_快递企业涉及到的计算机语言-程序员宅基地
- RedisTemplate与zset redis_redistemplate zset-程序员宅基地
- 服务器虚拟化培训计划,vmware虚拟机使用培训(一)概要.ppt-程序员宅基地
- application/x-www-form-urlencoded方式对post请求传参-程序员宅基地
- 网络安全常见十大漏洞总结(原理、危害、防御)-程序员宅基地