1、moveWithVelocity(CoreAPI*api, Flight* flight,float32_t xVelocity,float32_t yVelocity,float32_t zVleocity,float32_t yawRate,int timeoutInMs=2000,float yawRateThresholdInDegs = 0.5,float ...
”OnboardSDK“ 的搜索结果
在这里下载手册如何使用OnboardSDK 在这里下载SDK Ubuntu版非ROS源码的各种版本OnboardSDKgit分支 M600、A3/N3 最高仅支持OSDK 3.9;M210 V2系列无人机支持OSDK 3.9 及以上版本;M300 RTK 支持OSDK 4.0 及以上版本。...
1、飞控连接至PC 步骤 && Windows下使用onboardSDK sample文件夹下的PureQt激活API控制的时候,步骤如下: (1)通过usb-TTL连接PC机和飞控主板的UART口,只连接RX,TX,GND即可 (2)插入USB-TTL到电脑端,在设备管理器...
Ubuntu 16.04 + Onboard SDK软件环境搭建UAV软件要求apt安装build-essential,cmake(2.8.3或以上)ROS及其依赖安装ROS和环境配置在软件源设置中允许"restricted", "universe", "multiverse"添加软件源sudo sh -c '...
大疆作为无人机行业的佼佼者,其应用范围从户外旅行、拍照到影视拍摄,以及工业运用都有着极高的地位。那么,我们如何仅仅使用大疆的飞控来开发出我们自己的...onboard sdk 这里主要讲讲怎么利用大疆的SDK进行...
大疆Onboard SDK 3.2玫瑰线例程浅析 前不久参加2017英飞凌杯无人机竞赛,研究了一下大疆的OnbardSDK,现在比赛结束了,简单写一下其中自带的玫瑰线例程分析,也算对比赛进行一点总结。技术渣,有错误的地方还请各位...
DJI的Onboard SDK在ROS环境的配置 https://blog.csdn.net/KID_yuan/article/details/102561988
In file included from /home/lanx/Downloads/Onboard-SDK-3.4/osdk-core/platform/linux/src/linux_serial_device.cpp:33: /home/lanx/Downloads/Onboard-SDK-3.4/osdk-core/platform/linux/inc/linux_serial_...
大疆官网下载最新的onboard sdk,我的是3.8,我选择的是在linux上开发 1.解压之后sdk目录下创建build文件夹,选择在终端打开 我用的cmake版本是3.12 输入 cmake .. 然后输入make make成功后如下: ...
前段时间一直在搞在M100上搭载处理器,并且用大疆官方的Onboard SDK来进行开发,所以就记录一下,免得过段时间忘记了。先上一张M100的图(来源于大疆官网): 一、硬件介绍 1、首先介绍大疆M100的硬件大致...
参考信息:https://developer.dji.com/onboard-sdk/documentation/development-workflow/hardware-setup.html 按照大疆官网的说明,我们先链接好A3飞控自带的GPS模块、PMU模块、LED模块(非必须,当需要链接DJi助手...
参考信息:https://developer.dji.com/onboard-sdk/documentation/development-workflow/environment-setup.html#qt 根据大疆官网的说明,OSDK QT编辑环境要求如下: Qt 5.9及以上版本 Qt Creator 4.3 MSVC2015/...
上篇播客中已经完成了DJI ...Onboard: Intel NUC 运行SDK 战神笔记本:win 10 运行DJI Assitant2 模拟器 无人机:大疆 M100 参考网址: https://blog.csdn.net/u012968115/article/details/79097532 https://blog
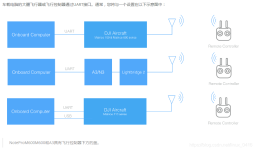
我可以使用OSDK来检测紧急情况,以便使用板载计算机自动部署降落伞 . 为清晰起见,请参阅this block diagram of my setup .我们正在使用DJI N3飞行控制器 . In order to deploy a parachute we need to make sure ...
需要#include <dji_control.hpp> (目前只使用过下面中的部分指令) (1)action() (有两个) 车辆基本动作指令,见FlightCommand对CMD的选择。 (2)angularRateAndVertPosCtrl() //控制姿态角 ...
大疆Onboard SDK开发中连接飞控后串口设置与开机自启动 Manifold/TX2/Linux 下相关设置 1、设置程序上电自动执行 设置程序上电自动执行,即为设置开机自动运行可执行文件,Manifold/TX2 中的设置大同小异,均需要...
我使用DJI A3和带有Onboard SDK 3.5的Raspberry Pi 3构建了自己的无人机 . 我测试了示例代码和遥测一个似乎没问题,但飞行控制一个没有用 . 在智能助手2的模拟器中,它运行正常,但在现实生活中,即使是电机也没有...
注意事项 第一次使用 M100 时需要连接手机app DJI ... 第一次使用Onboard SDK激活/获取控制权时也需要连接手机app DJI GO ,手机需要联网,DJI GO 会提示你是否使用开发者 app id 和 app key 激活,选择确认。 根...
1、Android DJI Mobile-SDK 开发 https://blog.csdn.net/undividedshy/article/details/601441862、【SDK使用】关于Onboard SDK的问题FAQhttps://bbs.dji.com/thread-15991-1-1.html3、DJI OnboardSDK学习笔记...
2019独角兽企业重金招聘Python工程师标准>>> ...
调整万向节的姿态,不需要那那么多语句。如果目的只是需要标准的某个姿态,那么直接控制万向节转到那个姿势即可。 将下面的代码在main.cpp中调用即可 //控制万向节转动 void setGimbalAngle(Vehicle* vehicle,int ...
Onboard-SDK-ROS:是DJI-M300无人机所对应的软件开发工具包,可以以ROS消息的形式拿到M300无人机传感器的数据,包括相机、IMU、GPS、RTK
大疆的onboardSDK3.8中自带的例程--linux的 telemetry —显示新数据订阅API的示例用法 camera-gimbal —显示相机命令和云台位置/速度控制的示例用法 flight-control —特别适用于位置控制,姿态控制,起飞,着陆 ...
一.关于Manifold有一些东西要写在前面: 1.Manifold的核心是英伟达TK1开发板。Manifold为arm7架构,搭载Ubuntu 14.04系统,...例如Onboard-SDK-3.7里的ADVANCED SENSING的例程。在开发手册中只说该例程仅在Ubuntu ...
参考博客: ... ... 官网:https://developer.dji.com/cn/onboard-sdk/documentation/quickstart/run-the-sample.html 妙算2G预装Ubuntu16.04系统,ROS版本为Kinetic
DJI_onboard SDK开发包以及使用方法: (1)http://blog.csdn.net/wendox/article/details/53066002 (2)http://blog.csdn.net/wendox/article/details/52349110
onboard Software Development kit to automate drones
dji_sdk: the core package handling the communication with Matrice 100, which provides a header file dji_drone.h for future use dji_sdk_demo: an example package of using dji_drone.h to
推荐文章
- 记录CentOS7 Linux下安装MySQL8_适合正式环境_干货满满(超详细,默认开启了开机自启动,设置表名忽略大小写,提供详细配置,创建非root专属远程连接用户)_centos7安装mysql8-程序员宅基地
- python 读取grib \grib2-程序员宅基地
- Kimi Chat,不仅仅是聊天!深度剖析Kimi Chat 5大使用场景!-程序员宅基地
- Datawhale-集成学习-学习笔记Day4-Adaboost-程序员宅基地
- TexStudio配置以及解决无法Build&View_texstudio 无法启动 build & view:pdflatex:"d:/data/texl-程序员宅基地
- 用户空间访问I2C设备驱动-程序员宅基地
- 人脸识别算法初次了解-程序员宅基地
- maven的pom文件学习-程序员宅基地
- wamp mysql 没有启动,WAMP中mysql服务突然无法启动 解决方法-程序员宅基地
- 《树莓派Python编程入门与实战(第2版)》——3.7 创建Python脚本-程序员宅基地