从学习dji-osdk到现在大概二十天左右,基本上是0基础学习这个东西,以前就用过一些51和stm32,Linux操作系统就会一些简单的操作指令,就这么点基础,然后开始学习OSDK。希望我的这篇文章可以帮助刚开始学习dji-sdk的...
”OSDK“ 的搜索结果
Mobile SDK(简称MSDK) https://developer.dji.com/cn/mobile-sdk/documentation/introduction/index.html 用于开发移动端(Android iOS)APP,在APP端实现对无人机的控制 UX SDK ...提供一套与无人机控制相关的界
1.初步了解PSDK w_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2JpZ2Jvc3N6aA==,size_16,color_FFFFFF,t_70) 为开发者能够开发出挂载在无人机上的负载设备,Payload SDK,X-Port云台...PSDK,MSDK,OSDK区别: PSDK:使...
参考博客: https://blog.csdn.net/qingtian11112/article/details/113524113 https://blog.csdn.net/qingtian11112/article/details/113531452 ... 妙算2G预装Ubuntu16.04系统,ROS版本为Kinetic

DJI的OSDK可以说是无人机软件developer的一个大门,想起在当年大三的时候某学长们做的视觉跟踪无人机,由于重点在于视觉跟踪算法,不想开发飞控,他们买了DJI naza飞控作为飞机飞控。可是遇到问题了:怎么用程序控制...
平台: UBUNTU16.04 ROS kinetic DJI ASSISTANT 2 OSDK3.3.1 Onboard SDK ROS 3.3.1 DJI N3飞控(型号:3.2.36.8 固件:1.7.1.5) DJI Ligh
大疆无人机红外图片提取sdk再centos下使用无法编译使用,解决办法有两种 (1)使用ubuntu docker镜像,导出导入到centos. (2)先再ubuntu下编译生成可执行文件,然后使用patchelf,并结合glibc all in one 开源插件使用...
Djitello、Yolov5、无人机技术 目标检测是一种计算机视觉技术,专注于识别和定位图像或视频中的特定对象。它不仅能够识别图像中的物体,还能够指示这些物体在图像中的位置。传统的目标检测方法通常使用特征工程和...
1.时间同步 对于M210 RTK来说: PPS信号是1HZ 的脉冲信号(一秒一次)同时一个PPS信号包含一个UTC数据 UTC数据包里包含含以下信息: typedef struct { ... Specifies year.... Specifies month....
1.这篇主要围绕osdk的M100激活进行展开,M100要进行OSDK开发,第一步就是现将设备激活,才能通过SDK对它进行控制; 一.硬件条件: 1.通过usb接口连接dji assistant,视频如下...
(1)从“https://github.com/dji-sdk/Onboard-SDK”下载了Onboard-SDK-master,OnboardSDK-master是OSDK的主分支,包含最新的功能特性,master分支已经合并了OSDK-3.9,用这个就行。 (2)“cd //Onboard-SDK-...
编译ROS工程前先按照DJI OSDK4.0.1在妙算2-g上编译运行文章中描述的方法将OSDK-4.0.1编译成功。 Onboard-SDK-ROS-4.0.1 项目地址: https://github.com/dji-sdk/Onboard-SDK-ROS/tree/4.0 妙算2-G操作系统为ubunut...
飞控UART接线2.DJI OSDK安装3.DJI ROS接口3.1 service相关3.1.1 获取与释放控制权限3.1.2 发布起飞、着陆与返航请求3.1.3 设置惯性系参考点3.2 话题订阅相关3.2.1 惯性坐标3.2.2 GPS3.2.3 欧拉角3.2.4 线速度3.2.5 ...

M600pro实现一键锁桨功能
标签: 经验分享
M600pro实现一键锁桨功能 近期使用Onboard-SDK-3.9和Onboard-SDK-ROS控制M600pro进行轨迹飞行,但是在飞行过程中出现一些糟糕的... osdk-core -> api -> dji_control.cpp文件中将: if(vehicle->getFwVersion
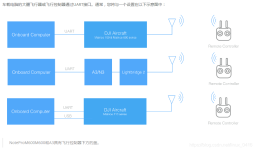
一、连线 需要: 两台笔记本电脑(一台安装Win10+DJI Assitant2 For Matrice进行仿真以及上位机显示,另一台安装Ubuntu16.04+ros系统起到替代秒算(Onboard Computer)的作用) 一根双头USB或者USB转TypeC(安卓...
对DJI Onboard-SDK Developer网站上的说明进行整理,第一次开发OSDK时可以参照这个来配置环境运行一个例程应用,也方便之后运行自己的app。 准备 1.一个DJI设备 2.一个Ubuntu系统作为Onboardcomputer 3.一个...
树莓派32位系统下安装最新的opencv4.5
机器环境 DJI_MINI_2 下载了大疆官方SDK,在认证完毕后调用推流方法: DJISDKManager.getInstance().getLiveStreamManager().setLiveUrl(liveShowUrl); int result = DJISDKManager.getInstance()....
本篇基于openharmony3.2R是提供给应用开发的工具包,跟随DevEco Studio下载,不包含系统应用所需要的高权限API是提供给OEM厂商开发应用的工具包,不能随DevEco Studio下载,包含了系统应用所需要的高权限API。
Camera初始化流程
标签: android
Camera Hal 初始化分析
上篇播客中已经完成了DJI SDK的安装:https://blog.csdn.net/AnChenliang_1002/article/details/108737955 下面是通过SDK对无人机进行控制: 设备如下: Onboard: Intel NUC 运行SDK 战神笔记本:win 10 运行DJI ...


开发者不需要对产品的每一项功能进行开发,使用合适的SDK,可以花费较少的时间,实现产品的功能。
芯片:交换芯片BCM56334,PHY5464,PHY5461交叉编译OS为TileproSDK版本:sdk-all-5.6.6BCM针对其出品的所有交换芯片和PHY芯片的配置源代码都在BCM的SDK软件包中,通过编译SDK可以生成针对你所需要的芯片的内核模块...
大疆Onboard-SDK、M100
要搞图形界面,SDL是比较好上手的一个库。今天试着在centos下搞了一个SDL的程序。下面是配置的步骤:首先yum search SDL,会出现SDL相关的软件包。不过我这里只有SDL1的,没有2的。然后看对了后,install一下。...
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地