错误串口不对串口通信不正常电机不动 串口不对 运行下面的代码看一下所有串口,...不会吧不会吧,不会真有人用osdk还不勾这一项吧 波特率不匹配,这个要给他改成匹配的才能正常。 比如Assistant 2里面是230400,那…/
”OSDK“ 的搜索结果
DJI OSDK4.0.1网址为: https://github.com/dji-sdk/Onboard-SDK/tree/4.0,在该网址下载zip压缩包至妙算机,在本地解压。 OSDK教程文档地址:...
大疆官方提供的软件包的主要有3个部分 1. 核心的API部分dji-sdk-lib,用于串口通信,建立各种任务的线程,读取信息的线程。 2. 用于封装核心API为ROS接口的dji_sdk 3. 简单的demo,给出了dji_sdk的使用方法。...

DJI OSDK 相关介绍 DJI 软件开发工具包 Mobile SDK:定制专属移动APP,做无人机行业应用专家 UX SDK:使用UI组件快速构建无人机行业应用 Windows SDK:定制专属桌面级应用,做无人机行业应用专家 Payload SDK:打造专用...
大疆官方提供的软件包的主要有3个部分 核心的API部分dji-sdk-lib,用于串口通信,建立各种任务的线程,读取信息的线程。 用于封装核心API为ROS接口的dji_sdk 简单的demo,给出了dji_sdk的使用方法。...
osdk:即dji大疆onboard sdk,用来做二次开发的的开发包 我使用的ONBOARD SDK版本是:3.6.0 用于A3和N3的二次开发 官方的开发文档链接:https://developer.dji.com/onboard-sdk/documentation/quick-start/index.html...
DJI OSDK-flight_control_samples学习 flight_control_sample.hpp /*! @file flight_control_sample.hpp * @version 3.3 * @date Jun 05 2017 * * @brief * Flight Control API usage in a Linux environment.....
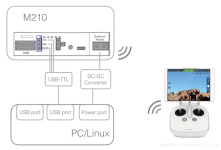
参考资料: Hardware Setup Guide - DJI Onboard SDK Documentation 文章目录1.... 软件环境搭建2.1 github下载源码2.2 DJI PC ... 启用OSDK5. STM32工具链6. 测试 1. 硬件连接 连接GND,TX,RX三线,VC...
DJI机载SDK ROS 4.1.0最近更新OSDK-ROS 4.1.0于2021年1月20日发布。您需要阅读下面的最新更新以获取更新信息。 请参阅和以获取更多信息。我们稍后将更新 。1.特点此版本4.1.0发行了功能部件包:dji_osdk_ros。 该...
在上一篇demo编译测试中,使用的代码代码包含了dji_linux_...使用一个函数替代osdk配置创建Vehicle *对象的代码。 原代码为 LinuxSetup linuxEnvironment("UserConfig.txt"); Vehicle *vehicle = linuxEnvironment.
OSDK3.9 QT编译
标签: 编译器
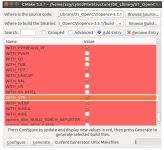
下载OSDK3.9 打开Onboard-SDK-3.9.0\Onboard-SDK-3.9.0\sample\platform\Qt\djiosdk-qt-sample工程文件 QT选择MinGW 32bit编译器 编译工程 如果有错误,可能是不支持C++11. 类似Time_UTC. 注释掉即可
大疆的PSDK是指机器人(无人机等)软件开发者套件,而OSDK是指开发者套件。这两个套件都是由大疆科技推出的,旨在为开发者提供更多的开发工具和接口,使他们能够更灵活地定制和开发自己的无人机应用程序。 PSDK...
本系列博客用于记录如何利用DJI M210和OSDK进行上位机的算法开发,以及开发过程中遇到的问题。 基础内容来自OSDK的开发官网,同时加入了自己的理解。 ERROR 1: 在运行stereo-vision-single-thread-sample时报错:...

OSDK配置Linux
标签: 嵌入式
1.软件环境配置 Ubuntu Linux 工具安装: 1.安装gcc 4.8.1/gcc 5.3.1 2.一个bash shell 3.CMake必须大于等于2.8 4.一个现代的linux发行版 5.(可选)Libusb库,用于M210上的高级传感功能 权限:(您需要将您的用户添加...
一、安装系统 刷机过程,一言难尽…都是血与泪… NX内存只有16G,安装完系统后无法再安装Jetpack的CUDA、DeepStream等软件包,强行安装会导致无法开机,不得不采用SD卡启动方案。 硬件准备 服务器主机:PC一台,...
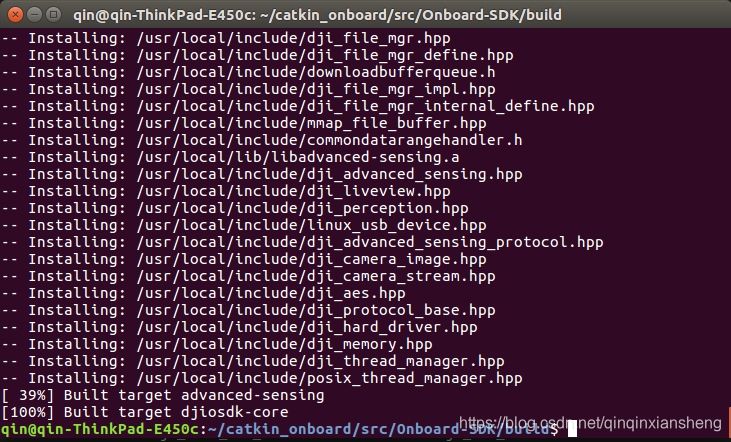
本系列博客用于记录如何利用DJI M210和OSDK进行上位机的算法开发,以及开发过程中遇到的问题。 大部分内容来自OSDK的开发官网,同时加入了自己的理解。 一、以Linux方式运行例程 1、编译OSDK和例程 从Github...
已知问题 nh.subscribe("dji_osdk_ros/height_above_takeoff", 10, &heightSubCallback); 该订阅返回的高度会出现跳变。 会逐步更新
Keil 编辑OSDK 安装 Keil 的版本 MDK529.EXE(建议购买License,网上有破解生成器的这里不介绍) https://blog.csdn.net/nicholas_duan/article/details/100515251 安装STM32的库 Keil.STM32F4xx_DFP.2.13.0.pack ...
**DJIM210V2+NANO+OSDK3.9开发** ps:可直接下载完整PDF文档(完整文档包括整个开发流程+问题记录+与官方技术交流邮件截图等) 链接:https://download.csdn.net/download/qq_35390371/12514361 注意事项 使用OSDK ...
大疆OSDK开发-在模拟器中画个一箭穿心 使用OSDK中的自主航线飞行的例子,在模拟器中画一个心形轨迹。 首先计算心形坐标,如下是python程序: from math import * import matplotlib.pyplot as plt xs = [] ys = ...
When running the "rosrun dji_osdk_ros camera_stream_node" Got below error: dbus[10854]: arguments to dbus_message_new_method_call() were incorrect, assertion "path != NULL" failed in file ../../../...
在嵌入式开发中,目标机多数不便于开发和调试,也为了批量部署,...本章以wsl为宿主机,使用多个交叉编译器,编译生成不同架构平台下的osdk-core静态库,并生成目标程序,最终直接复制程序到目标机(树莓派arm)运行。
DJI-OSDK学习笔记 1 写在前面一些计划结语 写在前面 此系列博客将为本人在学习DJI-OSDK3.9中的一些笔记,存在的问题会比较多,希望观者有选择地浏览。本篇主要是对如何学习的一些计划。 开了一个不一定填的完的坑 ...
再自行购买机载电脑, 购买一个升压(降压)电源模块给电脑供电, 就行了。都知道DJI配套的机载电脑妙算停产了, 二手市场被吵到高价。有一个方案相对便宜, 65淘宝买根线。目前仅是想法,还未实践。
一、先获取大疆SDK的开发包以及开发帐号 ... ... 注册好帐号后点击右上角进入用户中心,点击app 点击creat app创建OSDK APP ...新建工作空间并下载OSDK ROS开发包 mkdir -p ~/Desktop/catkin_ws/...
推荐文章
- Android RIL框架分析-程序员宅基地
- Python编程基础:第六节 math包的基础使用Math Functions_ps math function-程序员宅基地
- canal异常 Could not find first log file name in binary log index file_canal could not find first log file name in binary-程序员宅基地
- 【练习】生成10个1到20之间的不重复的随机数并降序输出-程序员宅基地
- linux系统扩展名大全,Linux系统文件扩展名学习-程序员宅基地
- WPF TabControl 滚动选项卡_wpf 使用tabcontrol如何给切换的页面增加滚动条-程序员宅基地
- Apache Jmeter常用插件下载及安装及软硬件性能指标_jmeter插件下载-程序员宅基地
- SpringBoot 2.X整合Mybatis_springboot2.1.5整合mybatis不需要配置mapper-locations-程序员宅基地
- ios刷android8.0,颤抖吧 iOS, Android 8.0正式发布!-程序员宅基地
- 【halcon】C# halcon 内存暴增_halcon 读二维码占内存-程序员宅基地