FPGA实现CAN通信
标签: stm32

标签: stm32

标签: 嵌入式
SocketCAN 采用常用的 Socket 网络编程接口来封装 CAN 协议,可以使开发人员几乎无压力地使用 CAN。SocketCAN 编程的思路与 Socket 网络编程几乎一样。socket() 函数返回一个 socketcan 的句柄,后续的操作都是基于...

标签: 网络

python-can 库为 Python 提供控制器局域网支持,为不同的硬件设备提供通用抽象,以及一套用于在 CAN 总线上发送和接收消息的实用程序。python-can 可以在任何 Python 运行的地方运行;从 CAN 的高功率计算机到 USB ...



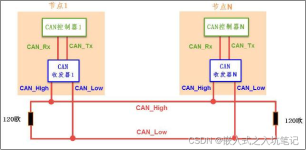
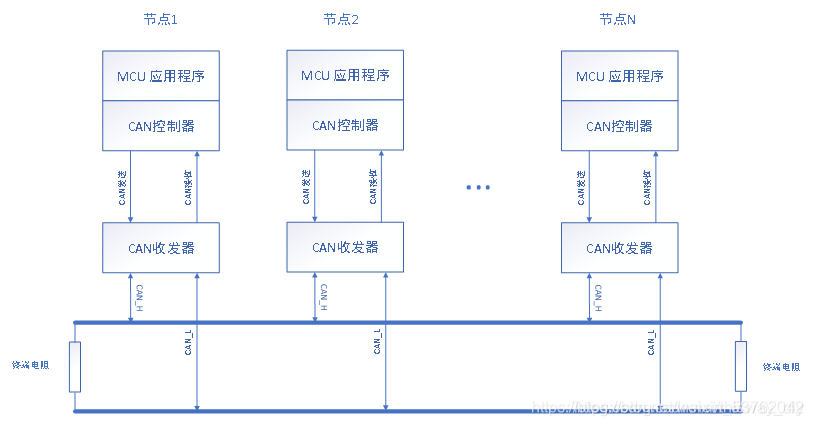
CAN通信是一种多节点通信协议,最早由Bosch公司开发并在1986年首次推出。...CAN总线由两根线组成,分别是CAN_H(CAN High)和CAN_L(CAN Low)。CAN总线使用不同的电压电平来表示0和1,并通过差分信号传输来抗干扰。
本文件夹中所带的例子可操作以下型号设备 PC104-CAN PC104-CAN2 ISA-9620 ISA-5420 PCI-5110 PCI-5121 ...USBCAN (USBCAN-I USBCAN-I+ USBCAN-II USBCAN-II+ USBCAN-2A) DNP9810 PEC9920 PCIE9220


标签: 网络

1. 前言 bxCAN是STM32系列最稳定的IP核之一,无论有哪个新型号出来,这个IP核基本未变,可见这个IP核的设计是相当成熟的。本文所讲述的内容属于这个IP核的一部分,掌握了本文所讲内容,就可以很方便...
本文详细介绍了如何在Rockchip系列中配置和使用CAN与CAN FD接口。包含驱动文件、内核配置、测试工具使用和常用命令。针对CAN FD,特别补充了与CAN的主要差异和优势 一些调试的大坑。


标签: CAN
基于C#的CAN通讯示例,实现CAN通讯的写入读出,测试通过。
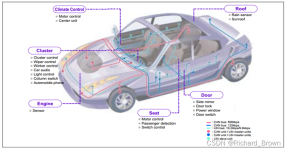
CAN总线作为一种高速、可靠、可靠的通信协议,已经成为现代汽车电子控制系统和其他工业自动化控制系统的主要通信协议。CAN总线不仅可以实现不同控制器之间的数据交换和协同控制,而且具有高实时性、高可靠性、低成本...

摘要:最近用到python-can,发现网上参考资料实在不多,也缺乏一定的系统性,特此进行一番整理。——by catmemo 1、简述 python-can库为Python提供了控制器局域网的支持,为不同的硬件设备提供了通用的抽象,并提供...
目录概述Linux can常用操作命令Linux CAN 应用编程CAN发送程序示例CAN接收程序示例CAN过滤器的使用 概述 CAN 协议通信技术在自动化领域,嵌入式器件编程,和汽车领域等具有广泛的应用。Socketcan 套接字是 Linux 下 ...

CA1N1、CAN2总线接收,中断接收。 平台:STM32F405RGT6、标准库。 CAN1配置 void CAN1_Mode_Init(u8 mode) { GPIO_InitTypeDef GPIO_InitStructure; CAN_InitTypeDef CAN_InitStructure; CAN_...
标签: can
Socket can 文档原名称:can.txt,位于 linux-3.2.0-m3352/Documentation/networking/can.txt。 CAN 控制器局域网络协议族之 Readme 文件(aka Socket CAN)。另外在该文档的后边附加一个CAN收发测试程序,用于与下位机...