论文解读--Visual Lane Tracking and Prediction for Autonomous Vehicles-程序员宅基地
技术标签: 算法 自动驾驶 论文解读 目标检测 人工智能 目标跟踪
自动驾驶汽车视觉车道线跟踪和预测
摘要
我们提出了一种用于自动驾驶汽车跟踪水平道路车道标记位置的可视化方法。我们的方法是基于预测滤波的。预测步骤估计在每个新的图像帧中期望的车道标记位置。它也是基于汽车的运动学模型和嵌入式测程传感器产生的信息。使用适当准备的测试车辆获得的实验结果表明,在某些条件下,如振荡和变道,预测步骤可以显著地减少跟踪误差。因此,我们相信我们的方法应用于基于图像的控制自动驾驶汽车可以提高系统性能。
1.介绍
汽车本身无疑是现代自动化的最大挑战之一。一方面,飞机和船舶的汽车驾驶员是众所周知的和广泛使用的。另一方面,由于更加复杂,对于汽车和卡车,这项技术仍在开发中。其目标是使汽车自动从地址A驾驶到地址B,与有经验的人类司机一样安全(或更安全)。在这种情况下,用户就只是一名乘客。
对于汽车来说,自动驾驶系统的一个基本要求是能够将车辆保持在道路内,并行驶在车道的中心。这需要了解周围环境的知识,这是通过安装在汽车上的传感器获得的,例如,照相机、激光扫描、GPS和惯性单元。
(NASHMAN,1992年)、(SCHNEIDERMAN,1994年)、(POMERLEAU,1996年)、(BROGGI,1999年)和(LU,2002年)等项目只依赖于摄像机生成的灰度图像,用于检测道路的位置和估计曲率。在(CHRISMAN,1998)和(SALES,2010)中,彩色图像被用来对属于道路的区域进行分类。这一想法也被应用于(DAHLKAMP,2006),以扩大系统的范围,超出在其自主车辆上使用的激光测距仪(LRF)传感器的范围。
立体视觉系统允许计算场景上物体的距离。在(BROGGI,2010)和(LIMA,2010)中使用了双目视觉系统(立体视觉)用于障碍检测。但是,这种系统具有计算成本高的缺点。
像(GUIZZO,2011)和(自动驾驶实验室,2012)等项目将LRF传感器与相机、GPS、IMU和地图信息相结合,使自动驾驶研究达到前所未有的水平。这两个项目都成功地完成了在真实城市环境中的自主导航任务。
在巴西,这一领域的研究正在开始发展,我们强调一些:为你驾驶,UNIFEI(VEERMAS,2010),CADU,UFMG(LIMA,2010),VERO,CTI /Campinas(VERO,2012),EESC / USP(SENA,2012),CARINA(CARINA,2010),由ICMC / USP开发。我们大学的另一个小组(UFES)也在开发一个自动驾驶汽车项目。他们买了一辆已经安装了主要硬件组件的车,他们主要关注的是软件方面。他们的主要目标是了解人类大脑是如何利用图像来解释世界的(LCAD,2013)。另一方面,我们项目的主要目标是建立一辆具有简单和低计算成本的解决方案的自动驾驶汽车。为了实现这一目标,我们正在通过安装执行器和传感器来调整普通汽车。我们的汽车已经能够在可控的条件下,在真实的道路上自动驾驶(VIVACQUA等人,2012年)。
我们的系统由一台连接到一个USB摄像头的笔记本电脑和一个接口板组成。USB摄像头安装在前挡风玻璃上,指向道路。接口板将计算机连接到汽车编码器,并连接到负责驱动轮定位的步进电机。
计算视觉系统产生的视觉信息受到由遮挡、反射、阴影等引起的噪声或误差的影响。为了使这些问题的影响最小化,对原始图像进行过滤过程,以产生更可靠的信息。这些信息是所谓的模型状态的基础,并被反馈到视觉算法中,以定义感兴趣的图像区域(ROI)(见图1)。在(VIVACQUA 等人,2012)中,这些信息也被控制器用来使自动驾驶汽车保持在道路的中心。

图1:用来生成模型状态的可视化信息流
一些视觉车道跟踪的方法(SCHNEIDERMAN,1994)、(AUFRERE,2000)、(LU,2002)和(CHOI,2012)。它们都使用某种过滤过程来更新其模型状态(描述车道标记的参数),但没有一种方法使用预测。为了实现预测,车辆的位移信息必须是可访问的和可靠的。我们已经对我们的自动驾驶汽车进行了必要的调整,在本文中,我们提出了一种基于预测过滤的可视化方法来跟踪水平道路车道标记的位置的可视化方法。预测步骤估计在每一个新的图像帧中的期望车道标记位置,以最小化跟踪误差。下面的几部分将对我们的系统进行解释,并讨论一些实验结果。
2.参照系
在进行预测步骤之前,需要将系统参照系从相机的参照系更改为汽车的参照系,考虑到摄像机在原点(自我参照系-OR)。在自动驾驶汽车中使用的视觉系统检测到的水平车道标记(VIVACQUA,2012)通过反向透视投影(图2)进行映射,就像图像是从天空看到的一样,假设道路是完美的平面(鸟瞰图)。

图2:参照系。(A)相机参照系;(B)汽车参照系
在自我参照系中,原点是地平面中相机正下方的点,Z轴对应于汽车的位移方向(当向前移动时),X轴是横向方向。图2 (B)显示了与图2 (A)图像中检测到的信息对应的两条导线(左和右)。预测步骤的基本思想是,可以根据运动学模型预测汽车在下一个图像帧中的位置,和在实际帧上的位置。
3.汽车运动学模型
汽车运动学模型可以用图3所示的自行车模型来近似。图中:Pr为描述车辆轨迹的圆周的中心,Pc为车辆中的摄像机位置(或原点),R为Pc描述的轨迹曲率半径,Lt为车辆前后轴的距离,Lr为或原点与后轴的距离,α为前轮转角。

图3:汽车运动学模型
使用汽车运动学模型(1),根据其参数和前轮转角(α),我们可以计算出世界参照系(WR)中的车辆轨迹。
 (1)
(1)
其中,x、z、θ为车辆在WR中的位置和方向,v为车辆的线速度。值得注意的是,世界参照系WR的起源是固定在地面上的,而不是固定在汽车上的。因此,当汽车移动时,点Pc描述了点线轨迹,固定物体在世界中的位置保持不变。
4.位置预测
在OR参考系中,点Pc与原点重合,世界上的固定物体旋转Pr,但方向相反。图4显示了在或参考系统中所看到的世界上一个固定物体的初始位置。根据初始位置的信息和由运动学模型所定义的轨迹,可以估计未来的位置。

图4:对象位置预测:(a)右转;(b)左转;(c)直行。
旋转中心(Pr)、摄像机轨迹的曲率半径(R)和角位移(Δθ)采用(2)、(3)和(4)进行计算。
以米为单位的距离(通过位于前轴的编码器获得)和前轮转角(α)(通过安装在驱动轮轴上的另一个编码器获得):
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
其中,ΔL为位移距离。
5.抛物线旋转
要估计任何物体的新位置,人们只需知道旋转中心(Pr)、旋转角度(Δθ),并应用一个二维旋转操作。在(VIVACQUA,2012)中描述的自动驾驶车辆的具体案例中,系统被测试,跟踪对象是构成道路模型的两个道路车道标记。每一个标记都用一个二次多项式表示。
![]() (5)
(5)
给定旋转抛物线的一个点(X,Z),我们可以通过反向旋转操作,在原始抛物线中找到相应的点(X,Z),由下式给出
![]() (6)
(6)
![]() (7)
(7)
其中Px和Pz为旋转中心的坐标。在(5)中替换(6)和(7),我们得到了旋转抛物线的一般形式:
![]() (8)
(8)
这种形式与软件中使用的原始数据结构不兼容,不允许对X给定Z的显式计算,这在计算上是不可取的。为了解决这个问题,我们提出了一种方法来找到一个良好的旋转抛物线的近似值,以保持在(5)中给出的默认形式。
考虑旋转的抛物线方程
![]() (9)
(9)
我们需要解决的问题是找到系数a2r,a1r和a0r。解决这个问题的一般思想是:找到区间内原始抛物线x (z)的中心点M[z0..z1];应用Δθ绕Pr点旋转(从而使M变成Mr);考虑Mr属于新的抛物线xr (z);并考虑这个点的切线方向被旋转角度Δθ减去。
切线在M点上的倾角由![]() 给出。利用切线差的性质,我们有:
给出。利用切线差的性质,我们有:
![]() 。由于旋转的抛物线曲率没有改变,我们有a2r=a2。系数a1r可以用
。由于旋转的抛物线曲率没有改变,我们有a2r=a2。系数a1r可以用![]() 计算,系数a0r用
计算,系数a0r用![]() 计算。通过这样做,我们得到在OR参考系的旋转抛物线参数。
计算。通过这样做,我们得到在OR参考系的旋转抛物线参数。
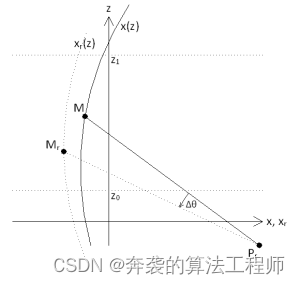
图5:旋转抛物线的近似值
6.滤波
我们考虑到车道标记位置在连续帧中不会有太大的变化,大量的噪声会导致图像快速变化(如反射或遮挡)。为此,我们选择使用一阶低通滤波器,考虑到其对系统行为的影响,我们在实验中定义了该时间常数:如果该值过低,滤波对零星误差测量的衰减作用很小。另一方面,如果它太高,这将延迟响应,并且会给模型带来困难,例如在弯道前后发生的道路形状的缓慢变化。在用车载摄像机在80km/h速度下拍摄的视频进行测试后,我们发现τ = 3的值在鲁棒性和响应速度之间产生了很好的折衷。
式(10)表示表示状态模型的向量Wi。式(11)是低通滤波器的表达式,它从视觉系统(Ui)生成的度量中更新模型状态。
![]() (10)
(10)
![]() (11)
(11)
7.实验结果
为了测量预测系统的性能,我们使用一个适当适应的测试车辆进行了一些实验,以获取与里程长测量同步的道路图像。该车辆在三种曲率条件下驾驶,如图6: (A)在左转;(B)在一条直线上;和(C)在右转。在每个曲率条件下,车辆就轨迹的振荡水平以三种不同模式进行(图6 (D)至6 (F)):无振荡(L0),车辆沿与导线平行的道路行驶;低振荡水平(L1),车辆周期性穿过中心线;高振荡(L2),车辆也穿过中心线,但有更明显的偏差。


图6:实验条件:(A)左转、(B)直行、(C)右转、(D、E、F)对应路线
在轨迹中引入振荡,迫使车辆移动不平行于道路线,以便预测能够证明其保持模型状态接近瞬时测量的能力。
测试在100米长的路径上以大约40 km/h的速度进行,每40 ms采集一次数据(图像和里程计)。图7显示了图6中每个轨迹的注册驱动轮位置。

图7:在试验中获得的驱动轮位置数据
收集到的数据在实验室进行分析,用来评估系统性能(有和不使用预测)。所使用的性能指数是绝对水平平均误差(AHAE),由模型定义的曲线与瞬时测量定义的曲线的差值计算出来。
![]() (12)
(12)
8.讨论
图8显示了从测试中获得的视频中获得的帧序列,它与图6(D)中所示的L2轨迹的情况相对应。这个序列对应于车辆远离中心线的延伸,可以从黄色标记的连续位移到左边。

图8:帧序列,显示了有和没有预测的跟踪过程。
图8清楚地显示,与只使用滤波和预测的模型(黑色虚线)相比,使用滤波和预测的模型(白色虚线)更接近度量值(红色连续线)。这说明了我们的方法的好处。
感知模型状态和视觉测量之间更接近的另一种方法是通过图9中的图,图中显示了过滤模型和带有预测的过滤模型的多项式的参数a0(车道偏移)和a1(车道方向)。曲率参数(a2)没有给出,因为它在考虑的拉伸中实际上是恒定的。

图9:仅滤波和滤波-预测的模型参数表现

图10:振荡等级2中的累积误差
在图9中,我们可以注意到低通滤波去除高频噪声的能力,这导致了延迟平滑曲线(没有预测情况)。通过使用预测,可以减少不期望的延迟(预测)。这种减少是因为预测补偿了汽车运动对捕获图像的影响。图10为具有较高振荡(L2)的测试条件下,指数AHAE的归一化累积误差(NAE),其中认为无预测的累积误差为1。用(13)计算,其中n为实验中使用的总帧数。
![]() (13)
(13)
在所有测试用例中,有预测的累积误差上升速率小于未有预测的累积误差(低于0,51)。
图11总结为在所有测试条件下得到的最终NAE值,详见图11。我们可以注意到,当汽车以较高振荡水平的轨迹行驶时,NAE的值会降低。这是因为当存在振荡时,车道标记在摄像机视野内横向发生位移,预测的使用补偿了这种效应,使模型更接近真实测量,同时保持滤波过程给出的鲁棒性。我们相信,预测步骤将提高自动驾驶车辆在类似条件下驾驶时的性能。
智能推荐
Kotlin 解压缩_kotlin 对上传的压缩包进行分析-程序员宅基地
文章浏览阅读638次。fun unZip(zipFile: String, context: Context) { var outputStream: OutputStream? = null var inputStream: InputStream? = null try { val zf = ZipFile(zipFile) val entries = zf.entries() while (en..._kotlin 对上传的压缩包进行分析
64K方法数限制解决办法_java函数大于64k编译失败-程序员宅基地
文章浏览阅读1.9k次。随着业务逻辑越来越多,业务模块也越来越大,不可避免会遇到64K方法数的限制。最直观的表现就是编译报错:较早版本的编译系统中,错误内容如下:Conversion to Dalvik format failed:Unable to execute dex: method ID not in [0, 0xffff]: 65536较新版本的编译系统中,错误内容如下:trouble writing outp_java函数大于64k编译失败
案例分享——低压电力线载波通信模组(借助电源线实现远距离数据传输、宽压输入、波特率范围广、应用场景多样化)_电力载波模块csdn-程序员宅基地
文章浏览阅读2k次,点赞7次,收藏10次。物联网领域,有很多数据通信场景,因为原设备整体系统结构、运行环境等方面的限制,需求在不增加通信数据线缆的情况下实现数据的远程传输,因为特殊应用场景下考虑到环境的限制,还不能使用常规的无线通信手段,所以借助电源线缆进行传输的电力线载波技术应运而生,本次博文给大家分享的就是博主完全自主研发的低压电力线载波通信模组。_电力载波模块csdn
密码学基础_密码体制的五个要素-程序员宅基地
文章浏览阅读7.4k次。密码学基本概念 密码学(Cryptology)是结合数学、计算机科学、电子与通信等学科于一体的交叉学科,研究信息系统安全的科学。起源于保密通信技术。具体来讲,研究信息系统安全保密和认证的一门科学。 密码编码学,通过变换消息(对信息编码)使其保密的科学和艺术 密码分析学,在未知密钥的情况下从密文推_密码体制的五个要素
python支持中文路径_基于python 处理中文路径的终极解决方法-程序员宅基地
文章浏览阅读1.9k次。1 、据说python3就没有这个问题了2 、u'字符串' 代表是unicode格式的数据,路径最好写成这个格式,别直接跟字符串'字符串'这类数据相加,相加之后type就是str,这样就会存在解码失误的问题。别直接跟字符串'字符串'这类数据相加别直接跟字符串'字符串'这类数据相加别直接跟字符串'字符串'这类数据相加unicode类型别直接跟字符串'字符串'这类数据相加说四遍3 、有些读取的方式偏偏..._python 路径 中文
阿里云 B 站直播首秀,用 Serverless 搭个游戏机?-程序员宅基地
文章浏览阅读107次。最近,阿云 B 站没声音,是在憋大招!8月5日周四 19:00 是阿里云的直播首秀,给大家请来了 Forrester 评分世界第一的 Serverless 团队产品经理江昱,给大家在线...._阿里云直播b站
随便推点
AS 3.1.3连续依赖多个Module,导致访问不到Module中的类_为什么as在一个包下建了多个module,缺无法打开了-程序员宅基地
文章浏览阅读1.1k次。我好苦啊,半夜还在打代码。还出bug,狗日的。问题是这样的:我在新建的项目里,建了两个Module: fiora-ec和fiora-core。项目的依赖顺序是这样的,App依赖fiora-ec,fiora-ec又依赖于fiora-core,因为这种依赖关系,所有可以在app和fiora-ec中删除一些不必要的引入,比如这个玩意儿:com.android.support:appcompat-v7:..._为什么as在一个包下建了多个module,缺无法打开了
Magento 常用插件二-程序员宅基地
文章浏览阅读1.4k次。1. SMTP 插件 URL:http://www.magentocommerce.com/magento-connect/TurboSMTP/extension/4415/aschroder_turbosmtp KEY:magento-community/Aschroder_TurboSmtp 2. Email Template Adapter..._magento extension pour ricardo.ch
【连载】【FPGA黑金开发板】Verilog HDL那些事儿--低级建模的资源(六)-程序员宅基地
文章浏览阅读161次。声明:本文为原创作品,版权归akuei2及黑金动力社区共同所有,如需转载,请注明出处http://www.cnblogs.com/kingst/ 2.5 低级建模的资源 低级建模有讲求资源的分配,目的是使用“图形”来提高建模的解读性。 图上是低级建模最基本的建模框图,估计大家在实验一和实验二已经眼熟过。功能模块(低级功能模块)是一个水平的长方形,而控制模块(低级控制模块)是矩形。组..._cyclone ep2c8q208c黑金开发板
R语言实用案例分析-1_r语言案例分析-程序员宅基地
文章浏览阅读2.2w次,点赞10次,收藏63次。在日常生活和实际应用当中,我们经常会用到统计方面的知识,比如求最大值,求平均值等等。R语言是一门统计学语言,他可以方便的完成统计相关的计算,下面我们就来看一个相关案例。1. 背景最近西安交大大数据专业二班,开设了Java和大数据技术课程,班级人数共100人。2. 需求通过R语言完成该100位同学学号的生成,同时使用R语言模拟生成Java和大数据技术成绩,成绩满分为100,需要满足正_r语言案例分析
Java知识体系总结(2024版),这一次带你搞懂Spring代理创建过程-程序员宅基地
文章浏览阅读639次,点赞11次,收藏26次。虽然我个人也经常自嘲,十年之后要去成为外卖专员,但实际上依靠自身的努力,是能够减少三十五岁之后的焦虑的,毕竟好的架构师并不多。架构师,是我们大部分技术人的职业目标,一名好的架构师来源于机遇(公司)、个人努力(吃得苦、肯钻研)、天分(真的热爱)的三者协作的结果,实践+机遇+努力才能助你成为优秀的架构师。如果你也想成为一名好的架构师,那或许这份Java成长笔记你需要阅读阅读,希望能够对你的职业发展有所帮助。一个人可以走的很快,但一群人才能走的更远。
车辆动力学及在Unity、UE4中的实现_unity 车辆动力学模型-程序员宅基地
文章浏览阅读3.9k次,点赞9次,收藏53次。受力分析直线行驶时的车轮受力如下:水平方向上,所受合力为:F=Ft+Fw+FfF=F_t+F_w+F_fF=Ft+Fw+Ff其中,FtF_tFt为牵引力,FwF_wFw为空气阻力,FfF_fFf为滚动阻力,下面我们将逐个介绍。驱动力先来说扭矩,扭矩是使物体发生旋转的一个特殊力矩,等于力和力臂的乘积,单位为N∙mN∙mN∙m:设驱动轴的扭矩为TtT_tTt,车轮半径为rrr,那么牵引力:Ft=Tt⁄rF_t=T_t⁄rFt=Tt⁄r如何求得驱动轴扭矩TtT_tTt呢?_unity 车辆动力学模型