学习stm32 pwm 基础内容示例说明led 控制_stm32的pwm例程-程序员宅基地
学习stm32 pwm 控制舵机,首先要了解pwm 的原理和工作模式,详情请参考stm32 中文参考手册。本次着重说明一下通用定时器,因为下面程序会使用到通用定时器。已经定时器与pwm 的使用,这次介绍内容比较多,舵机控制接着下一个,这次就led 灯的pwm 操作。
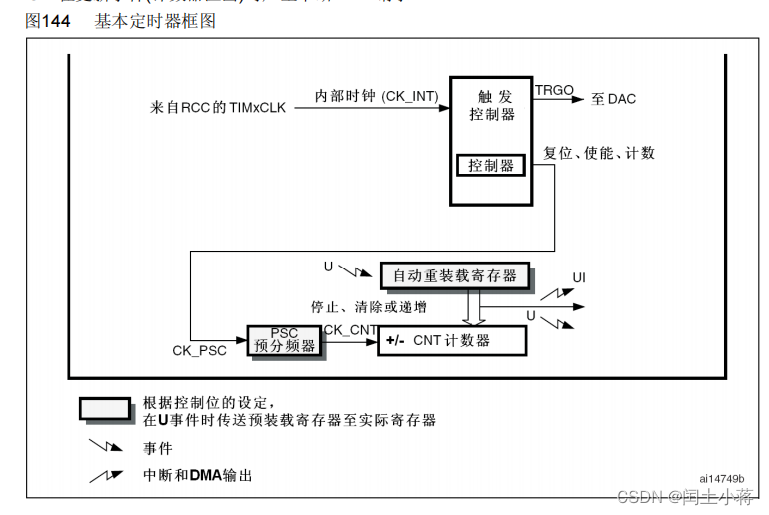
基本定时器(TIM6和TIM7)
基本定时器TIM6和TIM7各包含一个16位自动装载计数器,由各自的可编程预分频器驱动。它们可以作为通用定时器提供时间基准,特别地可以为数模转换器(DAC)提供时钟。实际上,它们在芯片内部直接连接到DAC并通过触发输出直接驱动DAC。 这2个定时器是互相独立的,不共享任何资源。
下面是基本定时器框图
高级控制定时器
高级控制定时器(TIM1和TIM8)由一个16位的自动装载计数器组成,它由一个可编程的预分频器驱动。
它适合多种用途,包含测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较、PWM、嵌入死区时间的互补PWM等)。
使用定时器预分频器和RCC时钟控制预分频器,可以实现脉冲宽度和波形周期从几个微秒到几个毫秒的调节。
高级控制定时器(TIM1和TIM8)和通用定时器(TIMx)是完全独立的,它们不共享任何资源。它们可以同步操作,具体描述参看13.3.20节。
下面是高级定时器框图
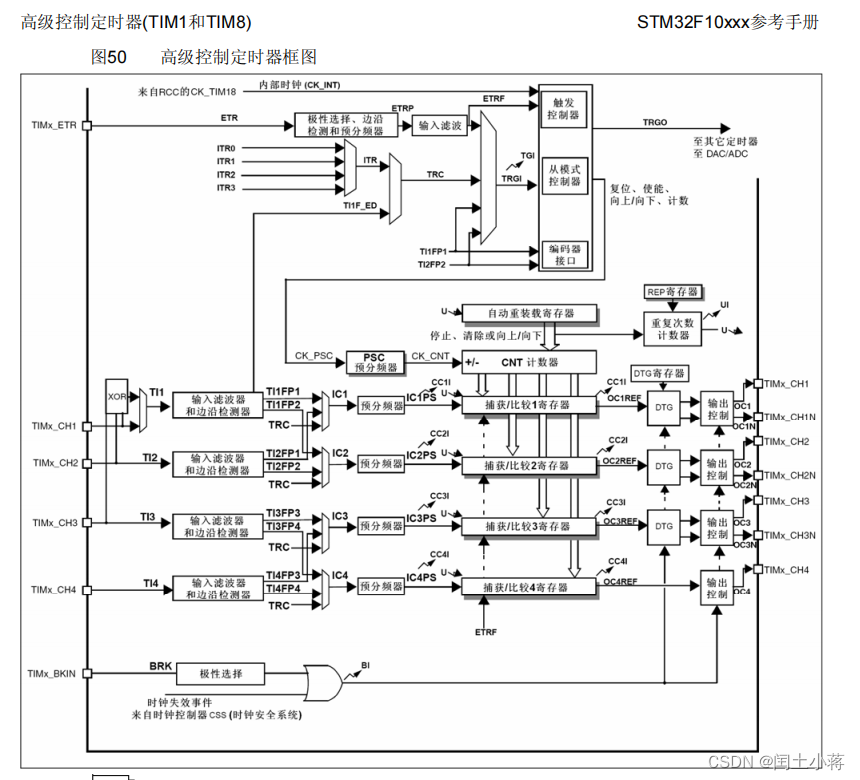
- TIM1和TIM8
- 时基单元包含
● 计数器寄存器(TIMx_CNT)
● 预分频器寄存器 (TIMx_PSC)
● 自动装载寄存器 (TIMx_ARR)
● 重复次数寄存器 (TIMx_RCR)
、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
通用定时器(TIMx)
通用定时器是一个通过可编程预分频器驱动的16位自动装载计数器构成。
它适用于多种场合,包括测量输入信号的脉冲长度(输入捕获)或者产生输出波形(输出比较和PWM)。
使用定时器预分频器和RCC时钟控制器预分频器,脉冲长度和波形周期可以在几个微秒到几个毫秒间调整。
每个定时器都是完全独立的,没有互相共享任何资源。
- TIM2、TIM3、TIM4和TIM5
下图是通用定时器的框图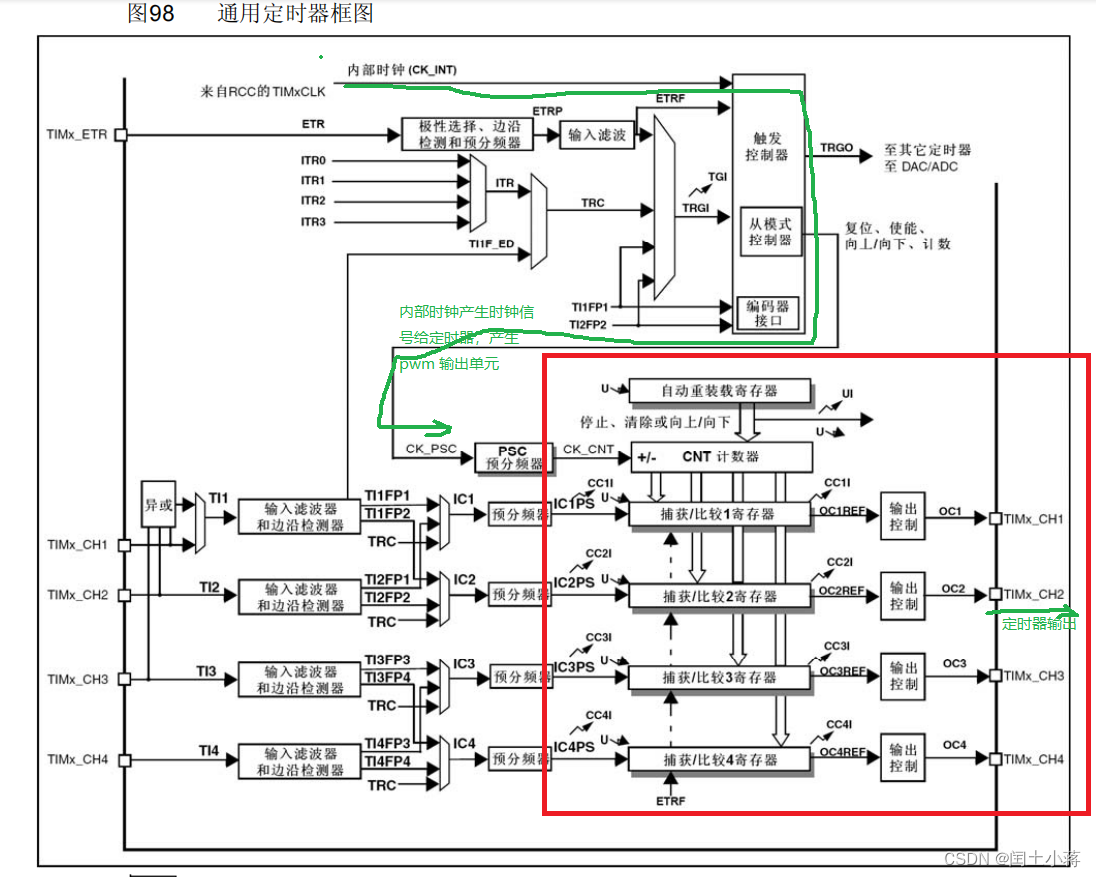
由上图所知pwm的时钟来源于内部时钟,通过定时器产生pwm 输出单元。
可编程通用定时器的主要部分是一个16位计数器和与其相关的自动装载寄存器。
这个计数器可以向上计数、向下计数或者向上向下双向计数。此计数器时钟由预分频器分频得到。
计数器、自动装载寄存器和预分频器寄存器可以由软件读写,在计数器运行时仍可以读写。
时基单元包含:
- 计数器寄存器(TIMx_CNT)
计数器由预分频器的时钟输出CK_CNT驱动,仅当设置了计数器TIMx_CR1寄存器中的计数器使能位(CEN)时,CK_CNT才有效。(有关计数器使能的细节,请参见控制器的从模式描述)。
注:真正的计数器使能信号CNT_EN是在CEN的一个时钟周期后被设置。 - 预分频器寄存器 (TIMx_PSC)
预分频器可以将计数器的时钟频率按1到65536之间的任意值分频。它是基于一个(在TIMx_PSC寄存器中的)16位寄存器控制的16位计数器。这个控制寄存器带有缓冲器,它能够在工作时被改变。 - 自动装载寄存器 (TIMx_ARR)
自动装载寄存器是预先装载的,写或读自动重装载寄存器将访问预装载寄存器。根据在TIMx_CR1寄存器中的自动装载预装载使能位(ARPE)的设置,预装载寄存器的内容被立即或在每次的更新事件UEV时传送到影子寄存器。当计数器达到溢出条件(向下计数时的下溢条件)并当TIMx_CR1寄存器中的UDIS位等于’0’时,产生更新事件。更新事件也可以由软件产生。
计数器模式
- 向上计数模式
在向上计数模式中,计数器从0计数到自动加载值(TIMx_ARR计数器的内容),然后重新从0开始
计数并且产生一个计数器溢出事件。
每次计数器溢出时可以产生更新事件,在TIMx_EGR寄存器中(通过软件方式或者使用从模式控
制器)设置UG位也同样可以产生一个更新事件。 - 向下计数模式
在向下模式中,计数器从自动装入的值(TIMx_ARR计数器的值)开始向下计数到0,然后从自动
装入的值重新开始并且产生一个计数器向下溢出事件。
每次计数器溢出时可以产生更新事件,在TIMx_EGR寄存器中(通过软件方式或者使用从模式控
制器)设置UG位,也同样可以产生一个更新事件。 - 中央对齐模式(向上/向下计数)
在中央对齐模式,计数器从0开始计数到自动加载的值(TIMx_ARR寄存器)−1,产生一个计数器
溢出事件,然后向下计数到1并且产生一个计数器下溢事件;然后再从0开始重新计数。
在这个模式,不能写入TIMx_CR1中的DIR方向位。它由硬件更新并指示当前的计数方向
时钟选择
- 内部时钟(CK_INT)
- 外部时钟模式1:外部输入脚(TIx)
- 外部时钟模式2:外部触发输入(ETR)
- 内部触发输入(ITRx):使用一个定时器作为另一个定时器的预分频器,如可以配置一个定时
器Timer1而作为另一个定时器Timer2的预分频器。
PWM模式
脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。
在TIMx_CCMRx寄存器中的OCxM位写入’110’(PWM模式1)或’111’(PWM模式2),能够独立地设置每个OCx输出通道产生一路PWM。必须设置TIMx_CCMRx寄存器OCxPE位以使能相应的预装载寄存器,最后还要设置TIMx_CR1寄存器的ARPE位,(在向上计数或中心对称模式中)使能自动重装载的预装载寄存器。
PWM模式1和PWM模式2
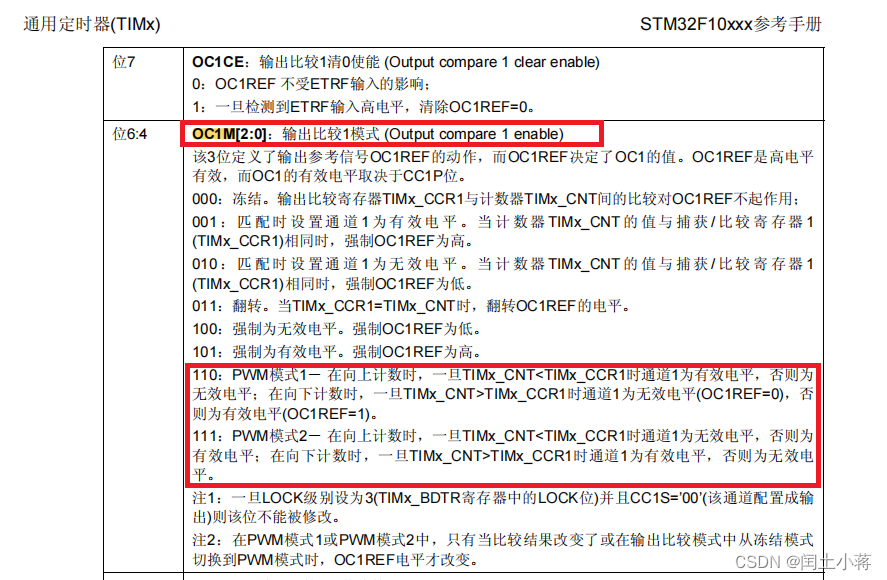
110:PWM模式1- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为
无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否
则为有效电平(OC1REF=1)。
111:PWM模式2- 在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为
有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电
平。
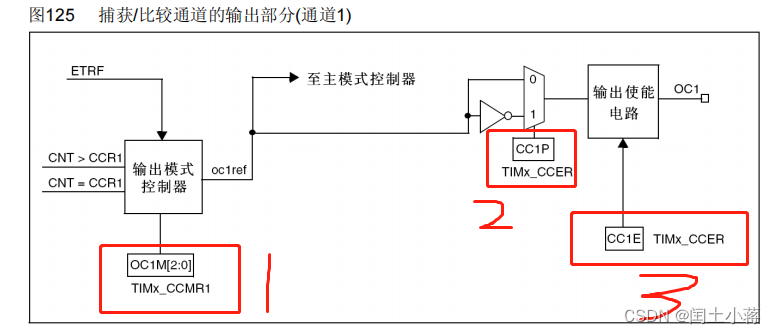
(捕获/比较使能寄存器TIMx_CCER, 参考中文手册14.4.9 )
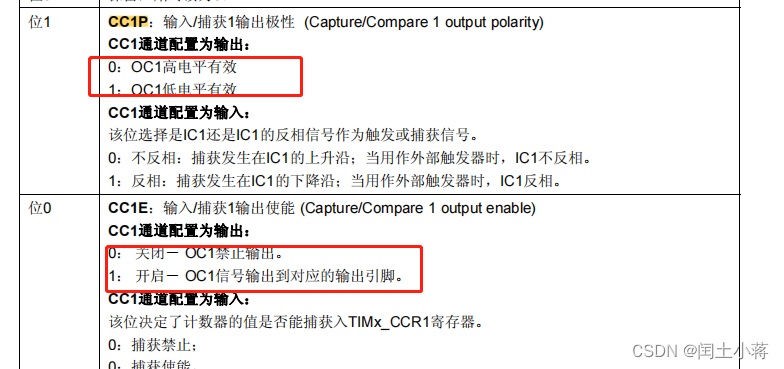
理解:
第一步:TIMx_CNT<TIMx_CCR1 (捕获寄存器值)均为有效电平
第二步:CC1P 设置 0高电平,1低电平
比较是否有效+设置高低电平=我们需要的pwm
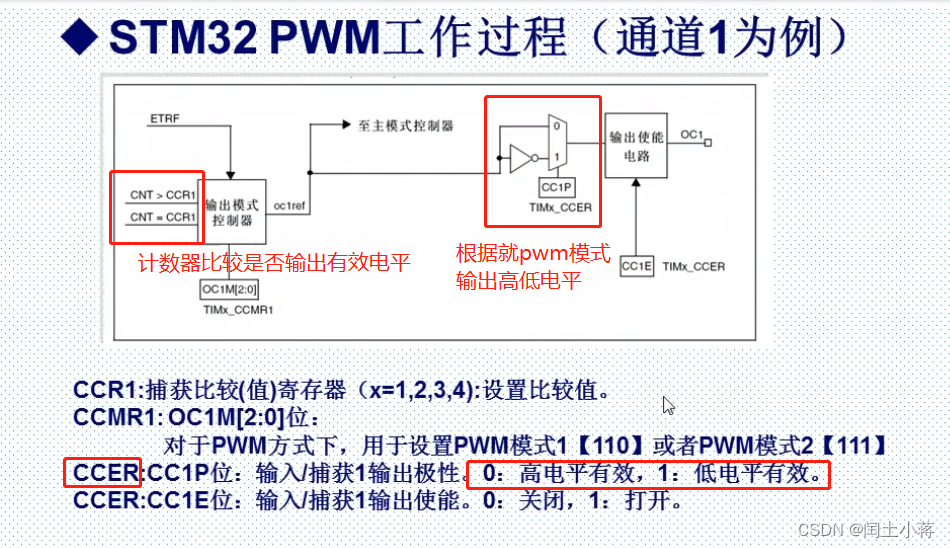
pwm 工作过程
如上图所示:通过捕获寄存器,获取计数器的数值,把计数器的值和CCRx进行比较 判断输出高低电平,从而产生一个pwm 波形输出。
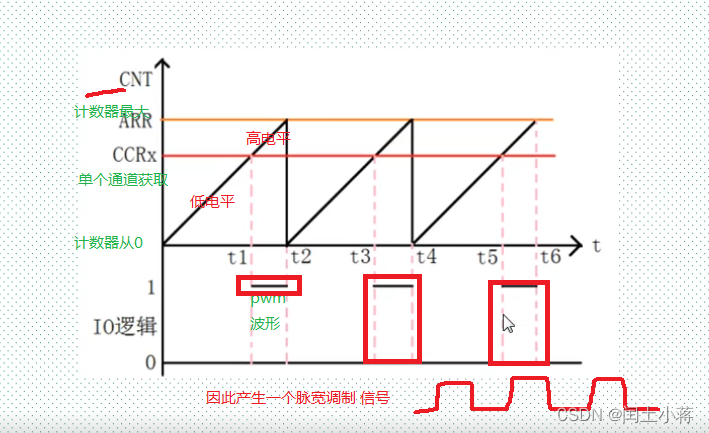
ARR :信号周期,
CCRx :捕获比较寄存器的值(决定占空比)
由上图所看:通过计数器去比较CCR1 进入CC1 去控制高低电平的输出,大于CCR输出高电平,小于输出低电平。
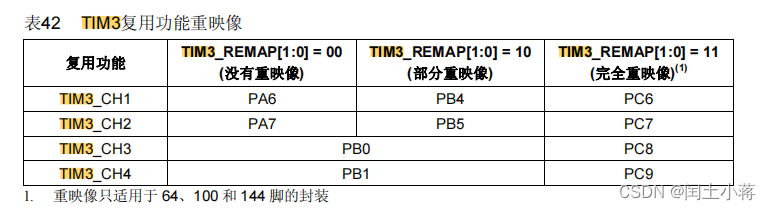
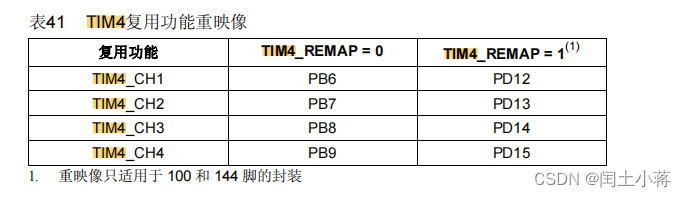
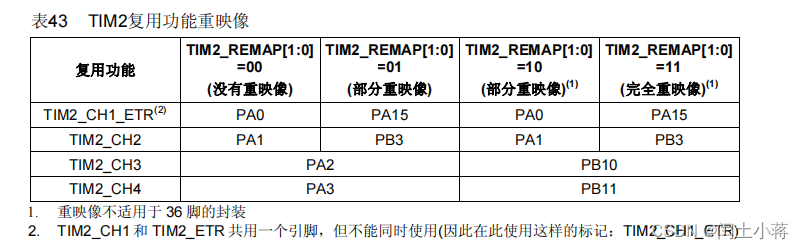
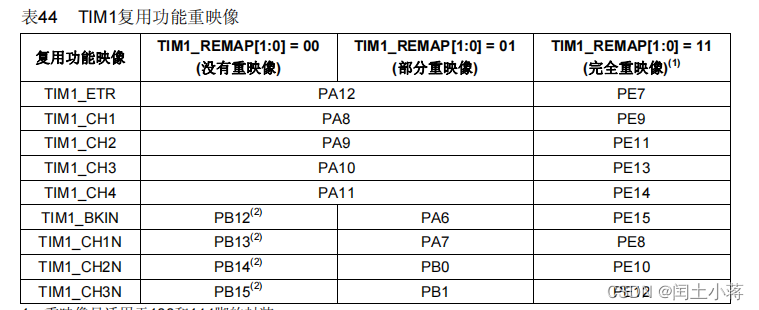
通用计时器通道
使用定时器,需查看手册,对应的io口使调用对应的定时器
列举如下图通道对应的引脚 (具体参考中文手册 8.3.7 定时器复用功能重映射)

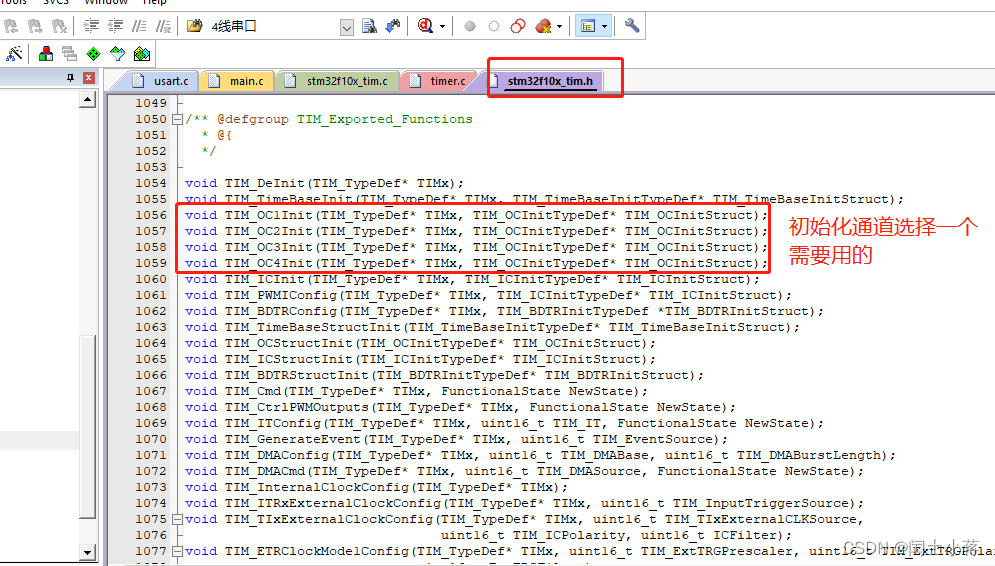
项目应用(库函数)
第一步骤引入 stm32f10x_tim.c 文件
按照上图所示我们需要设置这3个模块的函数
结构体指针类型
typedef struct
{
uint16_t TIM_OCMode; /*!< 指定TIM模式。该参数可以是@ref TIM_Output_Compare_and_PWM_modes的值,模式1,模式2 */
uint16_t TIM_OutputState; /*!< 指定TIM输出比较状态。该参数可以是@ref TIM_Output_Compare_state的值 是否输出使能IO口*/
uint16_t TIM_OutputNState; /*!< TIM互补输出比较状态。该参数可以是@ref TIM_Output_Compare_N_state的值@note该参数仅对TIM1和TIM8有效*/
uint16_t TIM_Pulse; /*!< 指定要加载到捕获比较寄存器的脉冲值。该参数可以是一个介于0x0000和0xFFFF之间的数字CCRx ,CCR1,CCR2,CCR */
uint16_t TIM_OCPolarity; /*!< 该参数可以是@ref tim_output_compare_极性的值 */
uint16_t TIM_OCNPolarity; /*!< 指定互补输出极性。该参数可以是@ref tim_output_compare_n_极性的值
@note该参数仅对TIM1和TIM8有效。*/
uint16_t TIM_OCIdleState; /*!< Idle状态下TIM Output Compare引脚状态。该参数可以是@ref TIM_Output_Compare_Idle_State的值@note该参数仅对TIM1和TIM8有效. */
uint16_t TIM_OCNIdleState; /*!< Idle状态下TIM Output Compare引脚状态。该参数可以是@ref TIM_Output_Compare_N_Idle_State的值@note该参数仅对TIM1和TIM8有效. */
} TIM_OCInitTypeDef;
示例
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明了
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明了
使用定时器,需查看手册,对应的io口使调用对应的定时器上面已经把通用定时器对应的引脚和映射引脚说明了
单片机使用的是stm32f103 zet6 设置led 灯的熄灭
- 通用定时器3中断初始化
- 定时器x中断服务程序
- TIMx PWM部分初始化
源码参考于 正点原子-ALIENTEK战舰STM32开发板,实验9 PWM输出实验
tim3.c
#include "timer.h"
#include "led.h"
#include "usart.h"
//
//1,增加TIM3_PWM_Init函数。
//2,增加LED0_PWM_VAL宏定义,控制TIM3_CH2脉宽
//
//通用定时器3中断初始化
//这里时钟选择为APB1的2倍,而APB1为36M
//arr:自动重装值。
//psc:时钟预分频数
//这里使用的是定时器3!
void TIM3_Int_Init(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //时钟使能
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 计数到5000为500ms
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 10Khz的计数频率
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE ); //使能指定的TIM3中断,允许更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
}
//定时器3中断服务程序
void TIM3_IRQHandler(void) //TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检查指定的TIM中断发生与否:TIM 中断源
{
TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中断待处理位:TIM 中断源
LED1=!LED1;
}
}
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIO
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
}
tim3.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
void TIM3_Int_Init(u16 arr,u16 psc);
void TIM3_PWM_Init(u16 arr,u16 psc);
#endif
主函数的应用
#include "timer.h"
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TIM3_PWM_Init(899,0); //不分频。PWM频率=72000000/900=80Khz
while(1)
{
delay_ms(10);
if(dir)led0pwmval++;
else led0pwmval--;
if(led0pwmval>300)dir=0;
if(led0pwmval==0)dir=1;
TIM_SetCompare2(TIM3,led0pwmval);
}
}
智能推荐
NeurIPS 2023 | FedFed:特征蒸馏应对联邦学习中的数据异构-程序员宅基地
文章浏览阅读75次。作者 |杨智钦单位 |北京航空航天大学来源|将门创投在本文中,我们提出了一种新的即插即用的联邦学习模块,FedFed,其能够以特征蒸馏的方式来解决联邦场景下的数据异构问题。FedFed首次探索了对数据中部分特征的提取与分享,大量的实验显示,FedFed能够显著地提升联邦学习在异构数据场景下的性能和收敛速度。论文标题:FedFed: Feature Distillation against..._about [neurips 2023] "fedfed: feature distillation against data heterogeneit
《Ray Tracing in One Weekend》——Chapter 1: Output an image_c++如何输出图片-程序员宅基地
文章浏览阅读3k次,点赞2次,收藏3次。《Ray Tracing in One Weekend》目录 第一部分:学习总结问题二:用C++输出第一张图片 第二部分:原文截图《Ray Tracing in One Weekend》目录_c++如何输出图片
spring-cloud-kubernetes与k8s的configmap_spring-cloud-starter-kubernetes-config maven-程序员宅基地
文章浏览阅读8k次,点赞7次,收藏9次。spring-cloud-kubernetes-config是spring-cloud-kubernetes框架下的一个库,用于将kubernetes的configmap作为配置文件,提供给springboot应用_spring-cloud-starter-kubernetes-config maven
BZOJ2753: [SCOI2012]滑雪与时间胶囊(最小生成树)-程序员宅基地
文章浏览阅读307次。传送门题意: n个有高度的点和m条边,边只能从高点到低点走,求最小树形图??题解: 最小生成树。 朱刘算法求最小树形图只能得70分,考虑更高效的算法。首先对图分层,发现低层节点对高层答案没有影响,考虑先处理高层的边。现在假设已经处理了高层的所有边,对于本层的边,其实就是一颗最小生成树。因为高层连向本层的边看做双向边没有任何影响。那么直接把边按照层数排序,第二关键字用权值排序即可。#includ
PySide:Python语言在GUI开发中的利器-程序员宅基地
文章浏览阅读1.3k次。python GUI开发中PySide2、PySide6及PyQt间区别,python版本要求,官方文档支持等_pyside
opencv+python Hough变换的基本原理_opencv python hough_multi_scale-程序员宅基地
文章浏览阅读3.3k次,点赞4次,收藏19次。Hough变换思想(参数空间变换):在原始图像坐标系下的一个点对应了参数坐标系中的一条直线,同样参数坐标系的一条直线对应了原始坐标系下的一个点,然后,原始坐标系下呈现直线的所有点,它们的斜率和截距是相同的,所以它们在参数坐标系下对应于同一个点。这样在将原始坐标系下的各个点投影到参数坐标系下之后,看参数坐标系下有没有聚集点,这样的聚集点就对应了原始坐标系下的直线。在实际应用中,y=kx+b形式..._opencv python hough_multi_scale
随便推点
vs2019安装和使用教程(详细)-程序员宅基地
文章浏览阅读10w+次,点赞565次,收藏2.9k次。vs2019安装和使用教程(详细)_vs2019
【渝粤题库】陕西师范大学201941 Java程序设计 作业(专升本)_which of the following are correct? _____ a. strin-程序员宅基地
文章浏览阅读2.5k次,点赞2次,收藏2次。《JAVA程序设计》作业一、选择题编译HelloWorld.java的正确命令是:java HelloWorld.class B)java HelloWorld.java C)javac HelloWorld.java正确运行HelloWorld.java的正确命令是:java HelloWorld B)javac HelloWorld.java C)javac HelloWorld.class下面程序代码,使用多行注释正确的是:A) // int k=9;// int j=8_which of the following are correct? _____ a. string[] list = new string{
Zynq UltraScale+ MPSoC:嵌入式设计 UG1209 视频教程_zynq ultrascale+ mpsoc 嵌入式设计方法指南-程序员宅基地
文章浏览阅读812次。注:本文转自赛灵思中文社区论坛,源文链接在此。本文原作者为XILINX工程师。以下为个人译文,仅供参考,如有疏漏之处,还请不吝赐教。本篇博文提供了一份视频列表,用于展示 (UG1209) 中的教程。这些视频是使用 Vivado Design Suite 2019.1 版和赛灵思软件开发套件 (SDK) 创建的。其中所含示例均为针对 Zynq UltraScale+ MPSoC ZCU102 Rev1 评估板的示例。视频 1 演示了如何使用 ZCU102 评估板来运行应用。虽然大部分视频都使_zynq ultrascale+ mpsoc 嵌入式设计方法指南
浅谈拉格朗日插值法_y_j_gi-程序员宅基地
文章浏览阅读284次。拉格朗日插值法_y_j_gi
hbase性能调试 转-程序员宅基地
文章浏览阅读263次。_hfile.format.version
MIT算法导论——第五讲.Linear Time Sort_linear time sorting-程序员宅基地
文章浏览阅读896次。本栏目(Algorithms)下MIT算法导论专题是个人对网易公开课MIT算法导论的学习心得与笔记。所有内容均来自MIT公开课Introduction to Algorithms中Charles E. Leiserson和Erik Demaine老师的讲解。(http://v.163.com/special/opencourse/algorithms.html)第五节-------线性时间_linear time sorting