这是高博《视觉SLAM14讲,从理论到实践》第4章的练习。加了一些注释和理解:
#include <iostream>
#include <cmath>
using namespace std;
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "sophus/so3.h"
#include "sophus/se3.h"
int main( int argc, char** argv )
{
// 沿Z轴转90度的“旋转矩阵”
Eigen::Matrix3d R = Eigen::AngleAxisd(M_PI/2, Eigen::Vector3d(0,0,1)).toRotationMatrix();
Sophus::SO3 SO3_R(R); // Sophus::SO(3)可以直接从“旋转矩阵”构造
Sophus::SO3 SO3_v( 0, 0, M_PI/2 ); // 亦可从“旋转向量”构造
Eigen::Quaterniond q(R); // 或者“四元数”
Sophus::SO3 SO3_q( q );
// 上述表达方式都是等价的
// 输出SO(3)时,以 "旋转向量(角+轴)" 形式输出
cout<<"SO(3) from matrix: "<<SO3_R<<endl;
cout<<"SO(3) from vector: "<<SO3_v<<endl;
cout<<"SO(3) from quaternion :"<<SO3_q<<endl;
Eigen::Vector3d so3 = SO3_R.log(); // 使用 "对数映射" 获得它的李代数
cout<<"so3 = "<<so3.transpose()<<endl;
cout<<"so3 hat=\n"<<Sophus::SO3::hat(so3)<<endl;// hat 为向量-------->矩阵
// 相对的,vee为反对称到向量
cout<<"so3 hat vee= "<<Sophus::SO3::vee( Sophus::SO3::hat(so3) ).transpose()<<endl; // transpose纯粹是为了输出美观一些
// 增量扰动模型的更新
Eigen::Vector3d update_so3(1e-4, 0, 0); //假设更新量为这么多
Sophus::SO3 SO3_updated = Sophus::SO3::exp(update_so3)*SO3_R;
cout<<"SO3 updated = "<<SO3_updated<<endl;
cout<<"*******************萌萌的分割线*****************************"<<endl;;
// 对SE(3)操作大同小异
Eigen::Vector3d t(1,0,0); // 沿X轴平移1-----------平移部分
Sophus::SE3 SE3_Rt(R, t); // 从R,t构造SE(3)-------旋转(旋转矩阵)+平移
Sophus::SE3 SE3_qt(q,t); // 从q,t构造SE(3)--------旋转 (四元数) +平移
cout<<"SE3 from R,t= "<<endl<<SE3_Rt<<endl;
cout<<"SE3 from q,t= "<<endl<<SE3_qt<<endl;
// 李代数se(3) 是一个六维向量,方便起见先typedef一下
typedef Eigen::Matrix<double,6,1> Vector6d; //6*1的double矩阵
Vector6d se3 = SE3_Rt.log(); // 使用 "对数映射" 获得它的李代数se3
cout<<"se3 = "<<se3.transpose()<<endl;
// 观察输出,会发现在Sophus中,se(3)的平移在前,旋转在后.
// 同样的,有hat和vee两个算符
cout<<"se3 hat = "<<endl<<Sophus::SE3::hat(se3)<<endl;
cout<<"se3 hat vee = "<<Sophus::SE3::vee( Sophus::SE3::hat(se3) ).transpose()<<endl;
// 最后,演示一下更新
Vector6d update_se3; //更新量
update_se3.setZero();
update_se3(0,0) = 1e-4d;
Sophus::SE3 SE3_updated = Sophus::SE3::exp(update_se3)*SE3_Rt;
cout<<"SE3 updated = "<<endl<<SE3_updated.matrix()<<endl;
return 0;
}
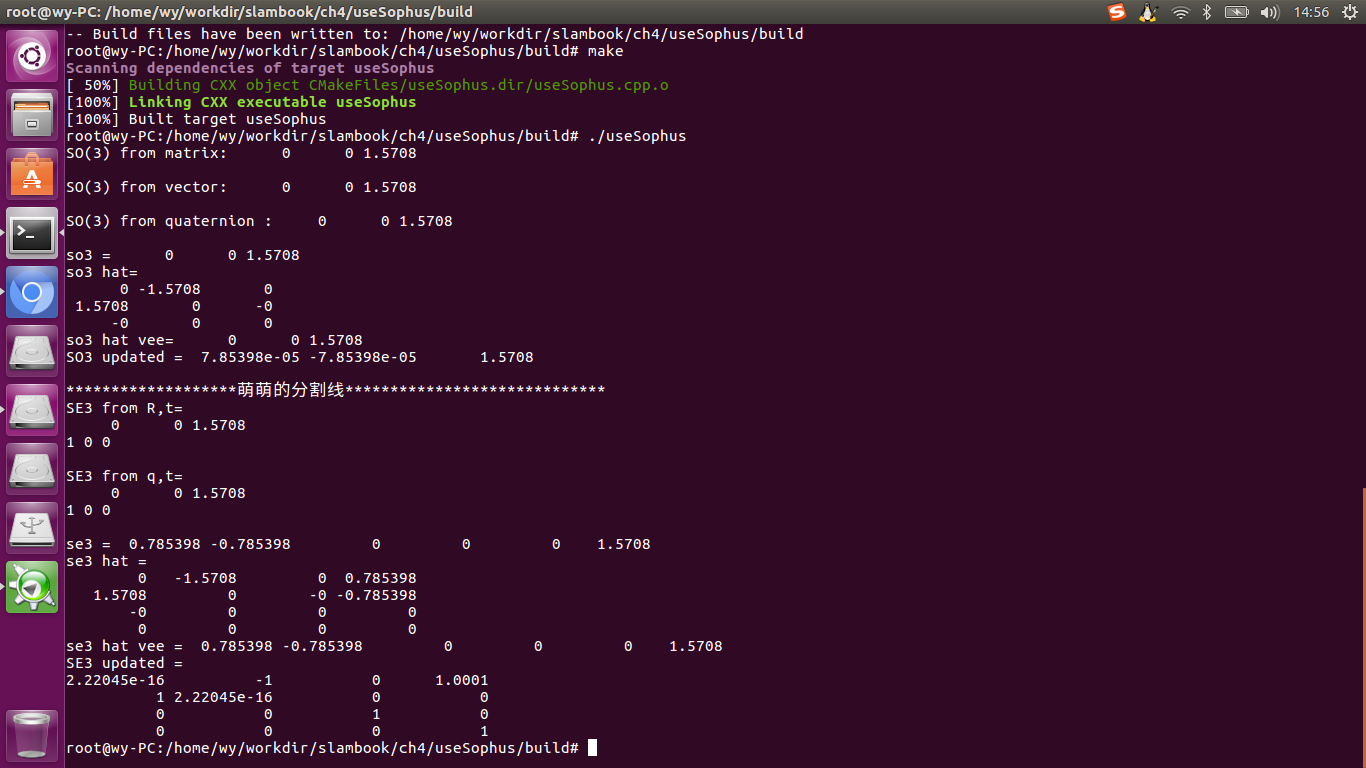
结果如下: