ROS naviagtion analysis: costmap_2d--Costmap2DROS_planner_costmap_ros_-程序员宅基地
技术标签: navigation ROS costmap_2d ROS Navigation
写在最前:
尊重原创,尊重他人劳动成果。原文地址:https://blog.csdn.net/u013158492/article/details/50485418
在上一篇文章中moveBase就有关于costmap_2d的使用: planner_costmap_ros_是用于全局导航的地图, controller_costmap_ros_是局部导航用的地图,地图类型为经过ROS封装的costmap_2d::Costmap2DROS*。
move_base.cpp中planner_costmap_ros_的代码如下:
//create the ros wrapper for the planner's costmap... and initializer a pointer we'll use with the underlying map
planner_costmap_ros_ = new costmap_2d::Costmap2DROS("global_costmap", tf_);
planner_costmap_ros_->pause();
move_base.cpp中controller_costmap_ros_代码如下:
//create the ros wrapper for the controller's costmap... and initializer a pointer we'll use with the underlying map
controller_costmap_ros_ = new costmap_2d::Costmap2DROS("local_costmap", tf_);
controller_costmap_ros_->pause();
以下是这个ROS类的UML:
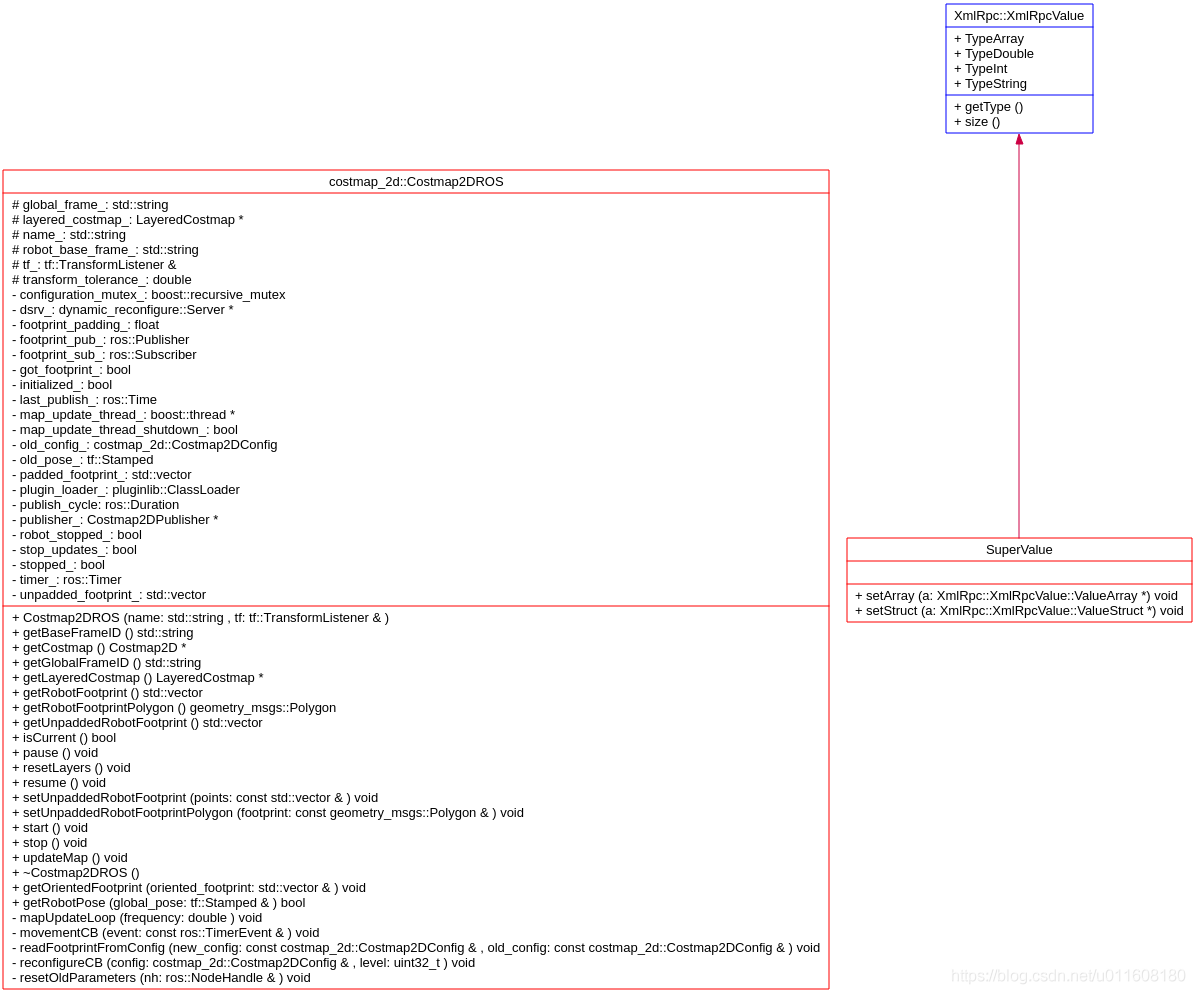
这个类的成员变量:LayeredCostmap* layered_costmap_; pluginlib::ClassLoader<Layer> plugin_loader_; 这两个最重要的成员变量,而LayeredCostmap类又包含了Costmap2D costmap_; 这个数据成员。
下面是这些类之间的关系:
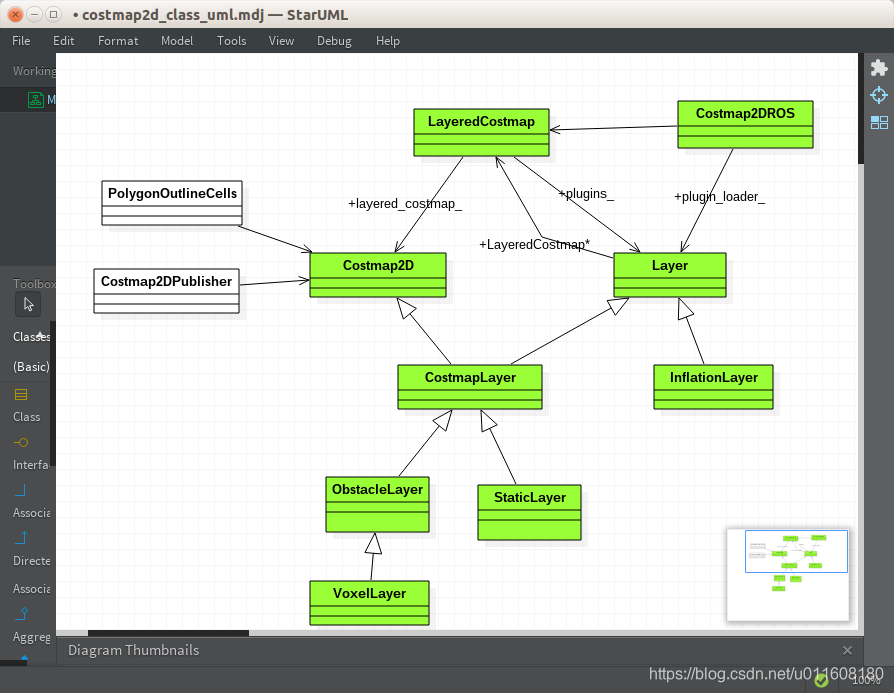
绿色的是核心代码,从ROS用户的角度,只需要调用Costmap2DROS这个类,因为这个类已经把所有关于地图的操作都封装好了。不过我这里是分析底层算法实现,就不得不写得很长很长。
所以还是先回到对Costmap2DROS这个类的分析,然后再进一步一层一层的分析其他的类。这些类完成了对机器人地图的表示和操作,因此其数据结构和算法都很有分析的价值。
首先是构造函数Costmap2DROS::Costmap2DROS(std::string name, tf::TransformListener& tf) : 因此必须提供一个tf参数。tf参数需要提供以下两个坐标系的关系:
// get global and robot base frame names
private_nh.param("global_frame", global_frame_, std::string("map"));
private_nh.param("robot_base_frame", robot_base_frame_, std::string("base_link"));
如果没有找到这两个坐标系的关系或者超时,则构造函数会一直阻塞在这里:
// we need to make sure that the transform between the robot base frame and the global frame is available
while (ros::ok()
&& !tf_.canTransform(global_frame_, robot_base_frame_, ros::Time(), ros::Duration(0.1), &tf_error))
{
ros::spinOnce();
if (last_error + ros::Duration(5.0) < ros::Time::now())
{
ROS_WARN("Timed out waiting for transform from %s to %s to become available before running costmap, tf error: %s",
robot_base_frame_.c_str(), global_frame_.c_str(), tf_error.c_str());
last_error = ros::Time::now();
}
// The error string will accumulate and errors will typically be the same, so the last
// will do for the warning above. Reset the string here to avoid accumulation.
tf_error.clear();
}
然后加入各个层次的地图:
if (private_nh.hasParam("plugins"))
{
XmlRpc::XmlRpcValue my_list;
private_nh.getParam("plugins", my_list);
for (int32_t i = 0; i < my_list.size(); ++i)
{
std::string pname = static_cast<std::string>(my_list[i]["name"]);
std::string type = static_cast<std::string>(my_list[i]["type"]);
ROS_INFO("%s: Using plugin \"%s\"", name_.c_str(), pname.c_str());
copyParentParameters(pname, type, private_nh);
boost::shared_ptr<Layer> plugin = plugin_loader_.createInstance(type);
layered_costmap_->addPlugin(plugin);
plugin->initialize(layered_costmap_, name + "/" + pname, &tf_);
}
}
boost::shared_ptr<Layer> plugin = plugin_loader_.createInstance(type); 这行会创建一个以 type为类类型的实例变量,然后让plugin这个指针指向这个实例。
layered_costmap_->addPlugin(plugin);然后 layered_costmap_ 将这些类型的地图都加入,addPlugin 实现:
void addPlugin(boost::shared_ptr<Layer> plugin)
{
plugins_.push_back(plugin);
}这里的关系是:Costmap2DROS 有一个layered_costmap_ 数据成员,然后layered_costmap_ 又有一个std::vector<boost::shared_ptr<Layer> > plugins_; 成员,因此可以将各个子类的实例化对象的指针交给父类Layer 指针plugins_ 管理。
plugin->initialize(layered_costmap_, name + "/" + pname, &tf_);这行将会对实例初始化,实际执行是plugin调用的父类Layer的方法void Layer::initialize(LayeredCostmap* parent, std::string name, tf::TransformListener *tf) 。
实际上父类Layer有一个成员变量为LayeredCostmap* layered_costmap_; 的指针,因此通过LayeredCostmap* layered_costmap_;指针指向了具体的子类,比如ObstacleLayer StaticLayer InflationLayer 等。
然后设置footprint:footprint_sub_ = private_nh.subscribe(topic, 1, &Costmap2DROS::setUnpaddedRobotFootprintPolygon, this); ,回调函数setUnpaddedRobotFootprintPolygon 实际调用的是成员函数:
void Costmap2DROS::setUnpaddedRobotFootprint(const std::vector<geometry_msgs::Point>& points)
{
unpadded_footprint_ = points;
padded_footprint_ = points;
padFootprint(padded_footprint_, footprint_padding_);
layered_costmap_->setFootprint(padded_footprint_);
}
以下是在footprint.cpp中的定义:
void padFootprint(std::vector<geometry_msgs::Point>& footprint, double padding)
{
// pad footprint in place
for (unsigned int i = 0; i < footprint.size(); i++)
{
geometry_msgs::Point& pt = footprint[ i ];
pt.x += sign0(pt.x) * padding;
pt.y += sign0(pt.y) * padding;
}
}
然后声明了一个timer,定时检测机器人是否在移动:
// Create a time r to check if the robot is moving
robot_stopped_ = false;
timer_ = private_nh.createTimer(ros::Duration(.1), &Costmap2DROS::movementCB, this);
这里回调函数movementCB 实现,是通过比较前后两个pose的差,判断机器人是否在移动:
void Costmap2DROS::movementCB(const ros::TimerEvent &event)
{
// don't allow configuration to happen while this check occurs
// boost::recursive_mutex::scoped_lock mcl(configuration_mutex_);
geometry_msgs::PoseStamped new_pose;
if (!getRobotPose(new_pose))
{
ROS_WARN_THROTTLE(1.0, "Could not get robot pose, cancelling reconfiguration");
robot_stopped_ = false;
}
// make sure that the robot is not moving
else
{
old_pose_ = new_pose;
robot_stopped_ = (tf2::Vector3(old_pose_.pose.position.x, old_pose_.pose.position.y,
old_pose_.pose.position.z).distance(tf2::Vector3(new_pose.pose.position.x,
new_pose.pose.position.y, new_pose.pose.position.z)) < 1e-3) &&
(tf2::Quaternion(old_pose_.pose.orientation.x,
old_pose_.pose.orientation.y,
old_pose_.pose.orientation.z,
old_pose_.pose.orientation.w).angle(tf2::Quaternion(new_pose.pose.orientation.x,
new_pose.pose.orientation.y,
new_pose.pose.orientation.z,
new_pose.pose.orientation.w)) < 1e-3);
}
}
在构造函数末尾,开启参数动态配置:
dsrv_ = new dynamic_reconfigure::Server<Costmap2DConfig>(ros::NodeHandle("~/" + name));
dynamic_reconfigure::Server<Costmap2DConfig>::CallbackType cb = boost::bind(&Costmap2DROS::reconfigureCB, this, _1,
_2);
dsrv_->setCallback(cb);
回调函数reconfigureCB 除了对一些类成员的配置值做赋值以外,还会开启一个更新map的线程
void Costmap2DROS::reconfigureCB(costmap_2d::Costmap2DConfig &config, uint32_t level)
{
transform_tolerance_ = config.transform_tolerance;
if (map_update_thread_ != NULL)
{
map_update_thread_shutdown_ = true;
map_update_thread_->join();
delete map_update_thread_;
}
map_update_thread_shutdown_ = false;
double map_update_frequency = config.update_frequency;
double map_publish_frequency = config.publish_frequency;
if (map_publish_frequency > 0)
publish_cycle = ros::Duration(1 / map_publish_frequency);
else
publish_cycle = ros::Duration(-1);
// find size parameters
double map_width_meters = config.width, map_height_meters = config.height, resolution = config.resolution, origin_x =
config.origin_x,
origin_y = config.origin_y;
if (!layered_costmap_->isSizeLocked())
{
layered_costmap_->resizeMap((unsigned int)(map_width_meters / resolution),
(unsigned int)(map_height_meters / resolution), resolution, origin_x, origin_y);
}
// If the padding has changed, call setUnpaddedRobotFootprint() to
// re-apply the padding.
if (footprint_padding_ != config.footprint_padding)
{
footprint_padding_ = config.footprint_padding;
setUnpaddedRobotFootprint(unpadded_footprint_);
}
readFootprintFromConfig(config, old_config_);
old_config_ = config;
map_update_thread_ = new boost::thread(boost::bind(&Costmap2DROS::mapUpdateLoop, this, map_update_frequency));
}mapUpdateLoop() 的线程函数定义:
void Costmap2DROS::mapUpdateLoop(double frequency)
{
// the user might not want to run the loop every cycle
if (frequency == 0.0)
return;
ros::NodeHandle nh;
ros::Rate r(frequency);
while (nh.ok() && !map_update_thread_shutdown_)
{
struct timeval start, end;
double start_t, end_t, t_diff;
gettimeofday(&start, NULL);
updateMap();
gettimeofday(&end, NULL);
start_t = start.tv_sec + double(start.tv_usec) / 1e6;
end_t = end.tv_sec + double(end.tv_usec) / 1e6;
t_diff = end_t - start_t;
ROS_DEBUG("Map update time: %.9f", t_diff);
if (publish_cycle.toSec() > 0 && layered_costmap_->isInitialized())
{
unsigned int x0, y0, xn, yn;
layered_costmap_->getBounds(&x0, &xn, &y0, &yn);
publisher_->updateBounds(x0, xn, y0, yn);
ros::Time now = ros::Time::now();
if (last_publish_ + publish_cycle < now)
{
publisher_->publishCostmap();
last_publish_ = now;
}
}
r.sleep();
// make sure to sleep for the remainder of our cycle time
if (r.cycleTime() > ros::Duration(1 / frequency))
ROS_WARN("Map update loop missed its desired rate of %.4fHz... the loop actually took %.4f seconds", frequency,
r.cycleTime().toSec());
}
}
核心功能在于调用updateMap();
void Costmap2DROS::updateMap()
{
if (!stop_updates_)
{
// get global pose
geometry_msgs::PoseStamped pose;
if (getRobotPose (pose))
{
double x = pose.pose.position.x,
y = pose.pose.position.y,
yaw = tf2::getYaw(pose.pose.orientation);
layered_costmap_->updateMap(x, y, yaw);
geometry_msgs::PolygonStamped footprint;
footprint.header.frame_id = global_frame_;
footprint.header.stamp = ros::Time::now();
transformFootprint(x, y, yaw, padded_footprint_, footprint);
footprint_pub_.publish(footprint);
initialized_ = true;
}
}
}
函数layered_costmap_->updateMap(x, y, yaw); 定义
void LayeredCostmap::updateMap(double robot_x, double robot_y, double robot_yaw)
{
// if we're using a rolling buffer costmap... we need to update the origin using the robot's position
if (rolling_window_)
{
double new_origin_x = robot_x - costmap_.getSizeInMetersX() / 2;
double new_origin_y = robot_y - costmap_.getSizeInMetersY() / 2;
costmap_.updateOrigin(new_origin_x, new_origin_y);
}
if (plugins_.size() == 0)
return;
minx_ = miny_ = 1e30;
maxx_ = maxy_ = -1e30;
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end();
++plugin)
{
(*plugin)->updateBounds(robot_x, robot_y, robot_yaw, &minx_, &miny_, &maxx_, &maxy_);
}
int x0, xn, y0, yn;
costmap_.worldToMapEnforceBounds(minx_, miny_, x0, y0);
costmap_.worldToMapEnforceBounds(maxx_, maxy_, xn, yn);
x0 = std::max(0, x0);
xn = std::min(int(costmap_.getSizeInCellsX()), xn + 1);
y0 = std::max(0, y0);
yn = std::min(int(costmap_.getSizeInCellsY()), yn + 1);
ROS_DEBUG("Updating area x: [%d, %d] y: [%d, %d]", x0, xn, y0, yn);
if (xn < x0 || yn < y0)
return;
{
// Clear and update costmap under a single lock
boost::unique_lock<Costmap2D::mutex_t> lock(*(costmap_.getMutex()));
costmap_.resetMap(x0, y0, xn, yn);
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end();
++plugin)
{
(*plugin)->updateCosts(costmap_, x0, y0, xn, yn);
}
}
bx0_ = x0;
bxn_ = xn;
by0_ = y0;
byn_ = yn;
initialized_ = true;
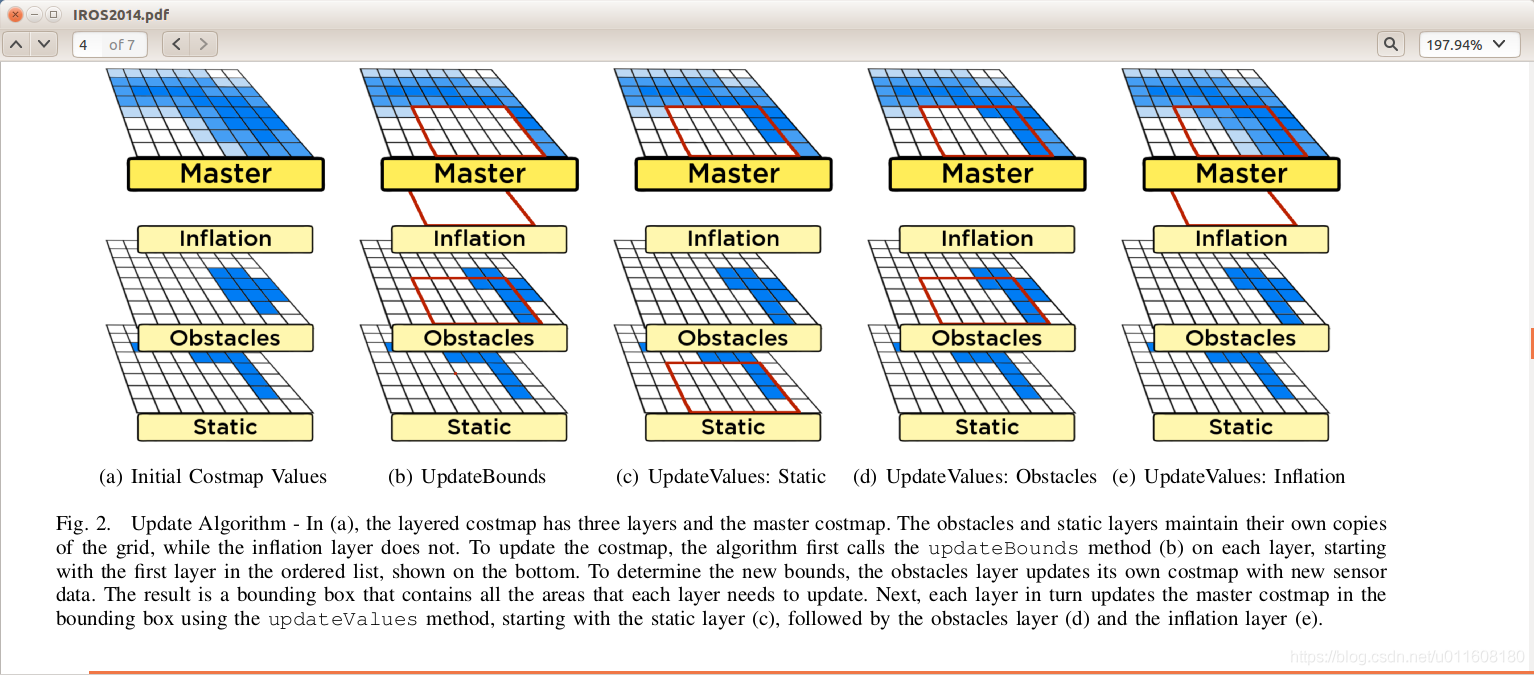
}updateMap 分为两个阶段,第一个阶段是UpdateBounds:这个阶段会更新每个Layer的更新区域,这样在每个运行周期内减少了数据拷贝的操作时间。
(*plugin)->updateBounds(robot_x, robot_y, robot_yaw, &minx_, &miny_, &maxx_, &maxy_);第二个阶段是 ` UpdateCosts :
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end();
++plugin)
{
(*plugin)->updateCosts(costmap_, x0, y0, xn, yn);
}
这个阶段将逐一拷贝数据到Master Map,关于Master Map是如何得到的,见下图,图来源于David Lu的Paper《Layered Costmaps for Context-Sensitive Navigation》:
函数
void Costmap2DROS::start(),这里通过成员变量layered_costmap_拿到类LayeredCostmap的数据成员std::vector<boost::shared_ptr<Layer> > plugins_; ,然后调用没个Layer 的子类的方法(*plugin)->activate();
void Costmap2DROS::start()
{
std::vector < boost::shared_ptr<Layer> > *plugins = layered_costmap_->getPlugins();
// check if we're stopped or just paused
if (stopped_)
{
// if we're stopped we need to re-subscribe to topics
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins->begin(); plugin != plugins->end();
++plugin)
{
(*plugin)->activate();
}
stopped_ = false;
}
stop_updates_ = false;
// block until the costmap is re-initialized.. meaning one update cycle has run
ros::Rate r(100.0);
while (ros::ok() && !initialized_)
r.sleep();
}函数 void Costmap2DROS::stop()
void Costmap2DROS::stop()
{
stop_updates_ = true;
std::vector < boost::shared_ptr<Layer> > *plugins = layered_costmap_->getPlugins();
// unsubscribe from topics
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins->begin(); plugin != plugins->end();
++plugin)
{
(*plugin)->deactivate();
}
initialized_ = false;
stopped_ = true;
}函数 void Costmap2DROS::resetLayers()
void Costmap2DROS::resetLayers()
{
Costmap2D* top = layered_costmap_->getCostmap();
top->resetMap(0, 0, top->getSizeInCellsX(), top->getSizeInCellsY());
std::vector < boost::shared_ptr<Layer> > *plugins = layered_costmap_->getPlugins();
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins->begin(); plugin != plugins->end();
++plugin)
{
(*plugin)->reset();
}
}
函数 bool Costmap2DROS::getRobotPose, 这里只需要指定global_pose 和 robot_pose 各自的frame_id_ 就可以通过tf_.transformPose(global_frame_, robot_pose, global_pose); 获得机器人的 global_pose 。
bool Costmap2DROS::getRobotPose(geometry_msgs::PoseStamped& global_pose) const
{
tf2::toMsg(tf2::Transform::getIdentity(), global_pose.pose);
geometry_msgs::PoseStamped robot_pose;
tf2::toMsg(tf2::Transform::getIdentity(), robot_pose.pose);
robot_pose.header.frame_id = robot_base_frame_;
robot_pose.header.stamp = ros::Time();
ros::Time current_time = ros::Time::now(); // save time for checking tf delay later
// get the global pose of the robot
try
{
tf_.transform(robot_pose, global_pose, global_frame_);
}
catch (tf2::LookupException& ex)
{
ROS_ERROR_THROTTLE(1.0, "No Transform available Error looking up robot pose: %s\n", ex.what());
return false;
}
catch (tf2::ConnectivityException& ex)
{
ROS_ERROR_THROTTLE(1.0, "Connectivity Error looking up robot pose: %s\n", ex.what());
return false;
}
catch (tf2::ExtrapolationException& ex)
{
ROS_ERROR_THROTTLE(1.0, "Extrapolation Error looking up robot pose: %s\n", ex.what());
return false;
}
// check global_pose timeout
if (current_time.toSec() - global_pose.header.stamp.toSec() > transform_tolerance_)
{
ROS_WARN_THROTTLE(1.0,
"Costmap2DROS transform timeout. Current time: %.4f, global_pose stamp: %.4f, tolerance: %.4f",
current_time.toSec(), global_pose.header.stamp.toSec(), transform_tolerance_);
return false;
}
return true;
}
函数 void Costmap2DROS::getOrientedFootprint 完成将机器人坐标系下的机器人轮廓点的坐标转化为机器人在当前全局坐标系下的轮廓点的值。具体定义如下:
void Costmap2DROS::getOrientedFootprint(std::vector<geometry_msgs::Point>& oriented_footprint) const
{
geometry_msgs::PoseStamped global_pose;
if (!getRobotPose(global_pose))
return;
double yaw = tf2::getYaw(global_pose.pose.orientation);
transformFootprint(global_pose.pose.position.x, global_pose.pose.position.y, yaw,
padded_footprint_, oriented_footprint);
}
到此,基本上 Costmap2DROS 的定义就这么多了。不过其中类和类之间的调用关系依然还是很复杂,因此需要需要分析plugin原理,才能真正知道这些类的关系是如何实现的。
智能推荐
c# 调用c++ lib静态库_c#调用lib-程序员宅基地
文章浏览阅读2w次,点赞7次,收藏51次。四个步骤1.创建C++ Win32项目动态库dll 2.在Win32项目动态库中添加 外部依赖项 lib头文件和lib库3.导出C接口4.c#调用c++动态库开始你的表演...①创建一个空白的解决方案,在解决方案中添加 Visual C++ , Win32 项目空白解决方案的创建:添加Visual C++ , Win32 项目这......_c#调用lib
deepin/ubuntu安装苹方字体-程序员宅基地
文章浏览阅读4.6k次。苹方字体是苹果系统上的黑体,挺好看的。注重颜值的网站都会使用,例如知乎:font-family: -apple-system, BlinkMacSystemFont, Helvetica Neue, PingFang SC, Microsoft YaHei, Source Han Sans SC, Noto Sans CJK SC, W..._ubuntu pingfang
html表单常见操作汇总_html表单的处理程序有那些-程序员宅基地
文章浏览阅读159次。表单表单概述表单标签表单域按钮控件demo表单标签表单标签基本语法结构<form action="处理数据程序的url地址“ method=”get|post“ name="表单名称”></form><!--action,当提交表单时,向何处发送表单中的数据,地址可以是相对地址也可以是绝对地址--><!--method将表单中的数据传送给服务器处理,get方式直接显示在url地址中,数据可以被缓存,且长度有限制;而post方式数据隐藏传输,_html表单的处理程序有那些
PHP设置谷歌验证器(Google Authenticator)实现操作二步验证_php otp 验证器-程序员宅基地
文章浏览阅读1.2k次。使用说明:开启Google的登陆二步验证(即Google Authenticator服务)后用户登陆时需要输入额外由手机客户端生成的一次性密码。实现Google Authenticator功能需要服务器端和客户端的支持。服务器端负责密钥的生成、验证一次性密码是否正确。客户端记录密钥后生成一次性密码。下载谷歌验证类库文件放到项目合适位置(我这边放在项目Vender下面)https://github.com/PHPGangsta/GoogleAuthenticatorPHP代码示例://引入谷_php otp 验证器
【Python】matplotlib.plot画图横坐标混乱及间隔处理_matplotlib更改横轴间距-程序员宅基地
文章浏览阅读4.3k次,点赞5次,收藏11次。matplotlib.plot画图横坐标混乱及间隔处理_matplotlib更改横轴间距
docker — 容器存储_docker 保存容器-程序员宅基地
文章浏览阅读2.2k次。①Storage driver 处理各镜像层及容器层的处理细节,实现了多层数据的堆叠,为用户 提供了多层数据合并后的统一视图②所有 Storage driver 都使用可堆叠图像层和写时复制(CoW)策略③docker info 命令可查看当系统上的 storage driver主要用于测试目的,不建议用于生成环境。_docker 保存容器
随便推点
网络拓扑结构_网络拓扑csdn-程序员宅基地
文章浏览阅读834次,点赞27次,收藏13次。网络拓扑结构是指计算机网络中各组件(如计算机、服务器、打印机、路由器、交换机等设备)及其连接线路在物理布局或逻辑构型上的排列形式。这种布局不仅描述了设备间的实际物理连接方式,也决定了数据在网络中流动的路径和方式。不同的网络拓扑结构影响着网络的性能、可靠性、可扩展性及管理维护的难易程度。_网络拓扑csdn
JS重写Date函数,兼容IOS系统_date.prototype 将所有 ios-程序员宅基地
文章浏览阅读1.8k次,点赞5次,收藏8次。IOS系统Date的坑要创建一个指定时间的new Date对象时,通常的做法是:new Date("2020-09-21 11:11:00")这行代码在 PC 端和安卓端都是正常的,而在 iOS 端则会提示 Invalid Date 无效日期。在IOS年月日中间的横岗许换成斜杠,也就是new Date("2020/09/21 11:11:00")通常为了兼容IOS的这个坑,需要做一些额外的特殊处理,笔者在开发的时候经常会忘了兼容IOS系统。所以就想试着重写Date函数,一劳永逸,避免每次ne_date.prototype 将所有 ios
如何将EXCEL表导入plsql数据库中-程序员宅基地
文章浏览阅读5.3k次。方法一:用PLSQL Developer工具。 1 在PLSQL Developer的sql window里输入select * from test for update; 2 按F8执行 3 打开锁, 再按一下加号. 鼠标点到第一列的列头,使全列成选中状态,然后粘贴,最后commit提交即可。(前提..._excel导入pl/sql
Git常用命令速查手册-程序员宅基地
文章浏览阅读83次。Git常用命令速查手册1、初始化仓库git init2、将文件添加到仓库git add 文件名 # 将工作区的某个文件添加到暂存区 git add -u # 添加所有被tracked文件中被修改或删除的文件信息到暂存区,不处理untracked的文件git add -A # 添加所有被tracked文件中被修改或删除的文件信息到暂存区,包括untracked的文件...
分享119个ASP.NET源码总有一个是你想要的_千博二手车源码v2023 build 1120-程序员宅基地
文章浏览阅读202次。分享119个ASP.NET源码总有一个是你想要的_千博二手车源码v2023 build 1120
【C++缺省函数】 空类默认产生的6个类成员函数_空类默认产生哪些类成员函数-程序员宅基地
文章浏览阅读1.8k次。版权声明:转载请注明出处 http://blog.csdn.net/irean_lau。目录(?)[+]1、缺省构造函数。2、缺省拷贝构造函数。3、 缺省析构函数。4、缺省赋值运算符。5、缺省取址运算符。6、 缺省取址运算符 const。[cpp] view plain copy_空类默认产生哪些类成员函数