零基础DSP实战TMS320F28035:第二节,系统时钟分析配置与定时器实战-程序员宅基地
技术标签: dsp开发 能源 零基础DSP实战TMS320F28035 嵌入式硬件 数据库 单片机
TMS320F28035第二节,系统时钟分析配置与定时器实战
第二节,系统时钟分析配置与定时器实战文章目录
一、TMS320F28035系统时钟说明
1.系统时钟大小
TMS320F28035系统时钟即为主频,根据第一节介绍,其系统时钟最大值为60MHz,在实际工程应用时会降低一定的比例使用,防止系统时钟在满频时发生不确定的运行不稳定,比如配置主频为56MHz、40MHz,当然具体配置多少在工程运用时根据各功能模块需求,合理配置主频大小。
(1)某些数字高速控制PWM情况相下,主频运用会比较高;
(2)在某些高速通讯的情况下,主频运用也会比较高;
(3)需要系统快速响应的功能设计时,主频运用也会比较高。
2.系统时钟源
根据数据手册TMS320F28035系统时钟源有4个来源:
(1)INTOSC1(内部0引脚振荡器1):为看门狗、内核和定时器2使用,大小为10MHz;
(2)INTOSC2(内部0引脚振荡器2):为看门狗、内核和定时器2使用,大小为10MHz;
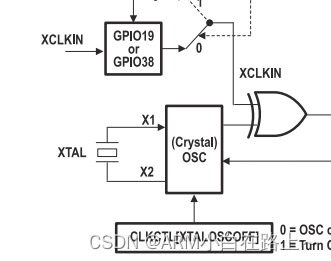
(3)晶体振荡器:通过X1/X2引脚外部接晶振提供时钟源(常见的无源晶振);
(4)外部时钟源:通过XCLKIN引脚输入外部时钟源(常见的有源晶振);
下图为手册中的时钟树,此处就不进行展开了,想了解原理的同学私下乐意自行分析或者评论区留言一起讨论。
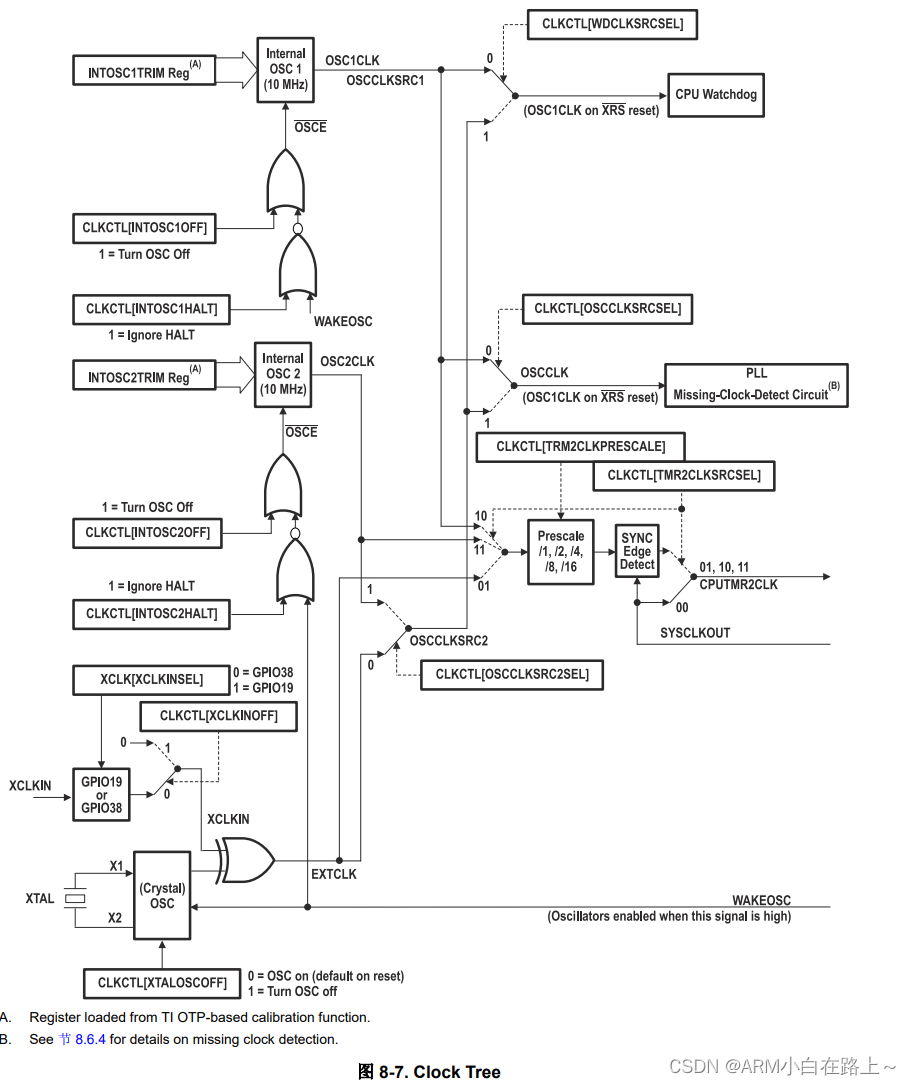 下图这一点即为时钟源的选项配置,结合寄存器说明可以深入了解,话不多说,下面进行工程代码分析。
下图这一点即为时钟源的选项配置,结合寄存器说明可以深入了解,话不多说,下面进行工程代码分析。
二、时钟配置代码分析
1.时钟函数引用与配置
第一节中我们实验完成了指示灯的演示,根据主函数中第一句函数InitSysCtrl(),系统初始化,时钟配置就在其中
InitSysCtrl();
此为InitSysCtrl中时钟源配置的选项
IntOsc1Sel();
根据IntOsc1Sel函数,我们可以找到时钟源配置有4四个函数,分别对应4个时钟源的选项,我们针对4个函数进行分析,不做过多解读,重点在与如何运用。
extern void IntOsc1Sel (void);
extern void IntOsc2Sel (void);
extern void XtalOscSel (void);
extern void ExtOscSel (void);
(1)void IntOsc1Sel (void)分析,函数原型为
结合数据手册寄存器说明
void IntOsc1Sel (void)
{
EALLOW;
//内部震荡器1开启
SysCtrlRegs.CLKCTL.bit.INTOSC1OFF = 0;
//内部震荡器1被选中
SysCtrlRegs.CLKCTL.bit.OSCCLKSRCSEL=0; // Clk Src = INTOSC1
//关闭外部时钟源XCLKIN
SysCtrlRegs.CLKCTL.bit.XCLKINOFF=1; // Turn off XCLKIN
//关闭外部晶体谐振振荡器(无源晶振)
SysCtrlRegs.CLKCTL.bit.XTALOSCOFF=1; // Turn off XTALOSC
//关闭内部时钟2
SysCtrlRegs.CLKCTL.bit.INTOSC2OFF=1; // Turn off INTOSC2
EDIS;
}
//通过配置只选择内部时钟1作为系统时钟源
(2)void IntOsc2Sel (void)分析,函数原型为
结合数据手册寄存器说明
void IntOsc2Sel (void)
{
EALLOW;
SysCtrlRegs.CLKCTL.all |= 0x6000;
SysCtrlRegs.CLKCTL.all &= ~0x6000;
SysCtrlRegs.CLKCTL.all |= 0x6000;
SysCtrlRegs.CLKCTL.all &= ~0x6000;
SysCtrlRegs.CLKCTL.all |= 0x6000;
//以上4句为,关闭外部有源晶振和外部晶体振荡器,也就是4种时钟源的后两个
//内部震荡器2开启
SysCtrlRegs.CLKCTL.bit.INTOSC2OFF = 0; // Turn on INTOSC2
//内部震荡器2被选中
SysCtrlRegs.CLKCTL.bit.OSCCLKSRC2SEL = 1; // Switch to INTOSC2
//选择内部震荡器
SysCtrlRegs.CLKCTL.bit.OSCCLKSRCSEL = 1; // Switch to use Int. Oscillator 2
//看门狗时钟源选择内部振荡器2或者外部震荡器
SysCtrlRegs.CLKCTL.bit.WDCLKSRCSEL = 0; // Clock Watchdog off (INTOSC1)
//内部震荡器1开启,主要是为了防止已开的始终丢失做备份使用
SysCtrlRegs.CLKCTL.bit.INTOSC1OFF = 0; // Leave INTOSC1 on
EDIS;
}
(3)void IntOsc2Sel (void)分析,函数原型为
结合数据手册寄存器说明
void XtalOscSel (void)
{
EALLOW;
//外部无源晶振开启,晶振接入X1 和X2引脚
SysCtrlRegs.CLKCTL.bit.XTALOSCOFF = 0; // Turn on XTALOSC
//等待外部时钟稳定,一些库中不含此项,建议增加提高系统稳定性
DELAY_US(1000L); // 1mS delay to ensure crystal
// oscillator is up and running.
// Adjust as needed.
//关闭外部有源晶振时钟源
SysCtrlRegs.CLKCTL.bit.XCLKINOFF = 1; // Turn off XCLKIN
//选择外部振荡器
SysCtrlRegs.CLKCTL.bit.OSCCLKSRC2SEL = 0; // Switch to external clock
//
// Switch INTOSC1 to INTOSC2/ext clk
//
//外部振荡器被选中
SysCtrlRegs.CLKCTL.bit.OSCCLKSRCSEL = 1;
//看门狗时钟源选择内部振荡器2或者外部震荡器
SysCtrlRegs.CLKCTL.bit.WDCLKSRCSEL = 0; // Clock Watchdog off of INTOSC1
//关闭内部时钟源2
SysCtrlRegs.CLKCTL.bit.INTOSC2OFF = 1; // Turn off INTOSC2
//内部震荡器1开启,主要是为了防止已开的始终丢失做备份使用
SysCtrlRegs.CLKCTL.bit.INTOSC1OFF = 0; // Leave INTOSC1 on
EDIS;
}
(4)void ExtOscSel (void)分析,函数原型为
这一段是我在项目中应用,并对原始库进行了修改,只打开了外部有源时钟,看门狗时钟同时也配置为外部时钟。
void ExtOscSel (void)
{
EALLOW;
//选择时钟输入引脚1-GPIO19 = XCLKIN, 0-GPIO38 = XCLKIN
SysCtrlRegs.XCLK.bit.XCLKINSEL = 1;
SysCtrlRegs.CLKCTL.bit.XTALOSCOFF = 1; //Turn on XTALOSC
SysCtrlRegs.CLKCTL.bit.XCLKINOFF = 0; //Turn on XCLKIN
SysCtrlRegs.CLKCTL.bit.OSCCLKSRC2SEL = 0; //Switch to external clock
SysCtrlRegs.CLKCTL.bit.OSCCLKSRCSEL = 1;
SysCtrlRegs.CLKCTL.bit.WDCLKSRCSEL = 1; //Clock Watchdog off of INTOSC1
SysCtrlRegs.CLKCTL.bit.INTOSC2OFF = 1; //Turn off INTOSC2
SysCtrlRegs.CLKCTL.bit.INTOSC1OFF = 1; //Leave INTOSC1 on
EDIS;
}
注意:时钟配置时由于寄存器受保护,故而在配置时在开头有EALLOW;,结尾处有EDIS;,不然寄存器配置会失败,在TI手册中会标明哪些寄存器会被保护,实际运用时依据手册说明进行寄存器操作,由于我用的是开发板,后续的工程实战阶段我主要运用 内部时钟1 进行演示介绍。
2.主频配置
在函数InitSysCtrl(),系统初始化,有一个库函数为InitPll();函数原型为:
void InitPll(Uint16 val, Uint16 divsel)
{
volatile Uint16 iVol;
if (SysCtrlRegs.PLLSTS.bit.MCLKSTS != 0)
{
EALLOW;
SysCtrlRegs.PLLSTS.bit.MCLKCLR = 1;
EDIS;
__asm(" ESTOP0"); // Uncomment for debugging purposes
}
if (SysCtrlRegs.PLLSTS.bit.DIVSEL != 0)
{
EALLOW;
SysCtrlRegs.PLLSTS.bit.DIVSEL = 0;
EDIS;
}
if (SysCtrlRegs.PLLCR.bit.DIV != val)
{
EALLOW;
SysCtrlRegs.PLLSTS.bit.MCLKOFF = 1;
SysCtrlRegs.PLLCR.bit.DIV = val;
EDIS;
DisableDog();
while(SysCtrlRegs.PLLSTS.bit.PLLLOCKS != 1)
{
}
EALLOW;
SysCtrlRegs.PLLSTS.bit.MCLKOFF = 0;
EDIS;
}
if((divsel == 1)||(divsel == 2))
{
EALLOW;
SysCtrlRegs.PLLSTS.bit.DIVSEL = divsel;
EDIS;
}
if(divsel == 3)
{
EALLOW;
SysCtrlRegs.PLLSTS.bit.DIVSEL = 2;
DELAY_US(50L);
SysCtrlRegs.PLLSTS.bit.DIVSEL = 3;
EDIS;
}
}
void InitPll(Uint16 val, Uint16 divsel)此函数有两个参数,主频的大小由这两个参数决定
主频 = 时钟源频率*val / divsel,我们后期介绍是用的内部时钟1的10M,主频使用60M满频演示,所以时钟可以选择
val = 12
divsel = 2
打开响应的宏定义即可
Uint16 val配置选项:
#define DSP28_PLLCR 12 //Uncomment for 60 MHz devs [60 MHz=(10MHz * 12)/2]
//#define DSP28_PLLCR 11
//#define DSP28_PLLCR 10
//#define DSP28_PLLCR 9
//#define DSP28_PLLCR 8 //Uncomment for 40 MHz devs [40 MHz=(10MHz * 8)/2]
//#define DSP28_PLLCR 7
//#define DSP28_PLLCR 6
//#define DSP28_PLLCR 5
//#define DSP28_PLLCR 4
//#define DSP28_PLLCR 3
//#define DSP28_PLLCR 2
//#define DSP28_PLLCR 1
//#define DSP28_PLLCR 0 // PLL is bypassed in this mode
Uint16 divsel配置选项:
//#define DSP28_DIVSEL 0 // Enable /4 for SYSCLKOUT
//#define DSP28_DIVSEL 1 // Disable /4 for SYSCKOUT
#define DSP28_DIVSEL 2 // Enable /2 for SYSCLKOUT
//#define DSP28_DIVSEL 3 // Enable /1 for SYSCLKOUT
至此,我们完成了时钟的分析与配置,下面我们结合工程进行定时器实战
三、定时器应用实战
1.工程框架整理
为了使工程具备较高的可读性,我们将一部分配置进行封装,分布式布局工程框架。
(1)系统配置放在public.c中
(2)系统的配置声明放在includes.h中
(3)各模块变量的定义放在各模块的独立c文件中,在各独立模块的h文件中进行外部声明,保证全局变量均可以引用或者使用,且不发生重复声明的错误。
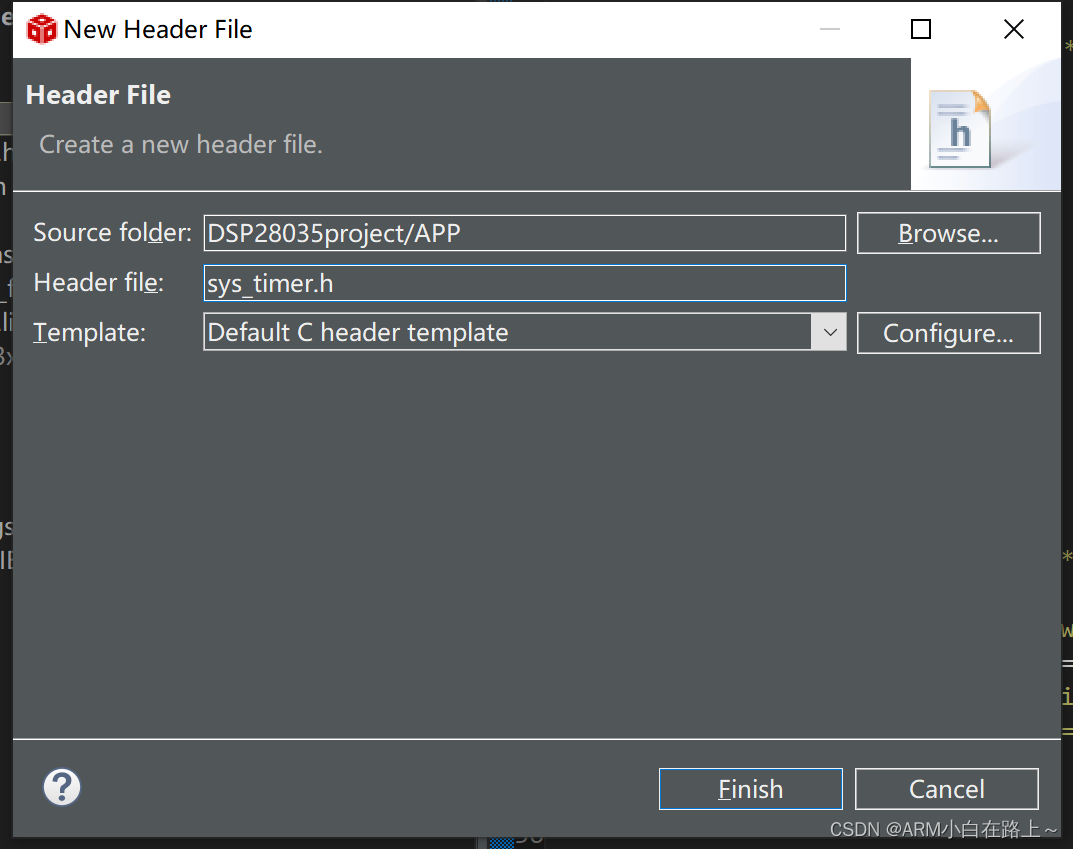
结合今天的定时器实战,故我们在第一节的基础上新建public.c,sys_timer.c、sys_timer.h三个文件,并在includes.h中引用sys_timer.h头文件,在各个.c中引用一个includes.h文件即可。建立完成后,对主程序部分代码进行封装并声明,最终代码框架有5个文件public.c,sys_timer.c、sys_timer.h、includes.h、main.c是我们自己要扩展的,
 各自文件中的代码,框架示意,代码分布合理,移植性高,可读性强,整个儿架构层次清晰,后续再有新功能时只针对新功能建立新的功能模块程序文件并添加对应头文件即可。
各自文件中的代码,框架示意,代码分布合理,移植性高,可读性强,整个儿架构层次清晰,后续再有新功能时只针对新功能建立新的功能模块程序文件并添加对应头文件即可。
/*
main.c
*/
#include "includes.h"
/********************************************************
函数名称:main
函数功能:主程序
入口参数:
出口参数:
修 改:
********************************************************/
static unsigned long delaycnt = 0;
void main(void)
{
Init_system();
/*灯初始化*****************************************************/
Init_system_leds();
/*timer初始化**************************************************/
Init_system_timer();
Init_system_end();
//
while(1)
{
//闪烁灯
/* D400ON();
D401ON();
D402ON();
for(delaycnt = 0;delaycnt<1000000;delaycnt++)
{
;
}
D400LOW();
D401LOW();
D402LOW();
for(delaycnt = 0;delaycnt<1000000;delaycnt++)
{
;
}
*/
//另外一种闪烁灯
D400TOGGLE();
D401TOGGLE();
D402TOGGLE();
for(delaycnt = 0;delaycnt<1000000;delaycnt++)
{
;
}
}
}
/*
includes.h
*/
#ifndef APP_INCLUDES_H_
#define APP_INCLUDES_H_
#include "DSP28x_Project.h"
#include "DSP2803x_DefaultISR.h"
#include "DSP2803x_Cla_defines.h"
#include "DSP2803x_Adc.h"
#include "CLAmath.h"
#include "sys_timer.h"
//D400 低电平亮;(也是PWM7B的引脚)
#define D400GPIO GPIO41
#define D400MUX GpioCtrlRegs.GPBMUX1.bit.D400GPIO
#define D400DIR GpioCtrlRegs.GPBDIR.bit.D400GPIO
#define D400TOGGLE() GpioDataRegs.GPBTOGGLE.bit.D400GPIO = 1
#define D400ON() GpioDataRegs.GPBCLEAR.bit.D400GPIO =1
#define D400LOW() GpioDataRegs.GPBSET.bit.D400GPIO =1
//D401 低电平亮;
#define D401GPIO GPIO34
#define D401MUX GpioCtrlRegs.GPBMUX1.bit.D401GPIO
#define D401DIR GpioCtrlRegs.GPBDIR.bit.D401GPIO
#define D401TOGGLE() GpioDataRegs.GPBTOGGLE.bit.D401GPIO = 1
#define D401ON() GpioDataRegs.GPBCLEAR.bit.D401GPIO =1
#define D401LOW() GpioDataRegs.GPBSET.bit.D401GPIO =1
//D402 低电平亮;
#define D402GPIO GPIO43
#define D402MUX GpioCtrlRegs.GPBMUX1.bit.D402GPIO
#define D402DIR GpioCtrlRegs.GPBDIR.bit.D402GPIO
#define D402TOGGLE() GpioDataRegs.GPBTOGGLE.bit.D402GPIO = 1
#define D402ON() GpioDataRegs.GPBCLEAR.bit.D402GPIO =1
#define D402LOW() GpioDataRegs.GPBSET.bit.D402GPIO =1
//------------------------------------------
void MemCopy(Uint16 *SourceAddr, Uint16* SourceEndAddr, Uint16* DestAddr);
extern void Init_system(void);
extern void Init_system_end(void);
extern void Init_system_leds(void);
#endif
/*
* public.c
*
* Created on: 2024年4月16日
* Author:
*/
#include "includes.h"
void Init_system(void)
{
InitSysCtrl();
DINT;
InitPieCtrl();
IER = 0x0000;
IFR = 0x0000;
InitPieVectTable();
// Copy time critical code and Flash setup code to RAM
// The RamfuncsLoadStart, RamfuncsLoadSize, and RamfuncsRunStart
// symbols are created by the linker. Refer to the F28035v1.cmd file.
//实现在RAM中运行代码的搬运,例如使用官方的DELAY_US
MemCopy(&RamfuncsLoadStart,&RamfuncsLoadEnd, &RamfuncsRunStart);
//memcpy(&Cla1funcsRunStart, &Cla1funcsLoadStart, (Uint32)&RamfuncsLoadSize);
InitFlash();
}
void Init_system_end(void)
{
EALLOW; // This is needed to write to EALLOW protected registers
PieCtrlRegs.PIECTRL.bit.ENPIE = 1; // Enable the PIE block
EDIS; // This is needed to disable write to EALLOW protected registers
//================================================================================
EINT;
ERTM;
}
void Init_system_leds(void)
{
EALLOW;
//3个普通LED
D400MUX = 0;//GPIO功能
D400DIR = 1;//输出
D401MUX = 0;
D401DIR = 1;
D402MUX = 0;
D402DIR = 1;
EDIS;
D400ON();
D401ON();
D402ON();
}
/*
* sys_timer.c
*
* Created on: 2024年4月16日
* Author:
*/
#include "includes.h"
void Init_system_timer(void)
{
}
/*
* sys_timer.h
*
* Created on: 2024年4月16日
* Author:
*/
#ifndef APP_SYS_TIMER_H_
#define APP_SYS_TIMER_H_
extern void Init_system_timer(void);
#endif /* APP_SYS_TIMER_H_ */
2.定时器配置说明
void Init_system_timer(void)
{
EALLOW; // This is needed to write to EALLOW protected registers
//打开对应定时器时钟
SysCtrlRegs.PCLKCR3.bit.CPUTIMER0ENCLK = 1;
SysCtrlRegs.PCLKCR3.bit.CPUTIMER1ENCLK = 1;
// CPU 定时器 0
// 寄存器地址指针和各自计时器初始化:
CpuTimer0.RegsAddr = &CpuTimer0Regs;
// 定时器周期寄存器最大值初始化:
CpuTimer0Regs.PRD.all = 0xFFFFFFFF;
// 预分频寄存器初始化为1 (SYSCLKOUT):
CpuTimer0Regs.TPR.all = 0;
CpuTimer0Regs.TPRH.all = 0;
// 确保定时器0停止:
CpuTimer0Regs.TCR.bit.TSS = 1;
// 重加载计数器周期值:
CpuTimer0Regs.TCR.bit.TRB = 1;
// 复位中断计时器:
CpuTimer0.InterruptCount = 0;
// CPU 定时器 1
// 寄存器地址指针和各自计时器初始化:
CpuTimer1.RegsAddr = &CpuTimer1Regs;
// 定时器周期寄存器最大值初始化:
CpuTimer1Regs.PRD.all = 0xFFFFFFFF;
// 预分频寄存器初始化为1 (SYSCLKOUT):
CpuTimer1Regs.TPR.all = 0;
CpuTimer1Regs.TPRH.all = 0;
// 确保定时器1停止:
CpuTimer1Regs.TCR.bit.TSS = 1;
// 重加载计数器周期值:
CpuTimer1Regs.TCR.bit.TRB = 1;
// 复位中断计时器:
CpuTimer1.InterruptCount = 0;
//定时器时长配置
//60:代表主频60M,
//1000:代表1000us,
//100000:代表100ms
ConfigCpuTimer(&CpuTimer0,60,1000);
ConfigCpuTimer(&CpuTimer1,60,100000);
StartCpuTimer0();
StartCpuTimer1();
PieVectTable.TINT0 = &CpuTimer0Isr;//往中断矢量表中填写定时器0一个指针
PieVectTable.TINT1 = &CpuTimer1Isr;//往中断矢量表中填写定时器1一个指针
//打开PIE组对应中断
PieCtrlRegs.PIEIER1.bit.INTx7 = 1; //使能第一组7通道定时器0
IER |= M_INT1; // Enable CPU INT
IER |= M_INT13; //根据中断向量表使能定时器1
EDIS; // This is needed to disable write to EALLOW protected registers
}
//定时器中断0的中断服务函数
interrupt void CpuTimer0Isr(void)
{
//============================================================
CpuTimer0Regs.TCR.bit.TIF = 1; //清除外设级中断标志位
PieCtrlRegs.PIEACK.bit.ACK1= 1; //清除PIE级中断应答
}
//定时器中断0的中断服务函数
interrupt void CpuTimer1Isr(void)
{
//============================================================
CpuTimer1Regs.TCR.bit.TIF = 1; //清除外设级中断标志位
PieCtrlRegs.PIEACK.bit.ACK1= 1; //清除PIE级中断应答
}
在sys_timer.h中对两个中断服务函数进行声明
extern interrupt void CpuTimer0Isr(void);
extern interrupt void CpuTimer1Isr(void);
3.扩展定时器延时函数的应用
(1)通过以上配置,我们实现了两个定时器,一个定时器0的1ms定时器终端和一个定时器1的100ms定时器中断。
(2)我们让一个指示灯在定时器1中进行翻转闪烁,去掉主程序中的循环闪烁代码。另外的指示灯用delay函数进行闪烁控制
主程序main中
/*
main.c
*/
#include "includes.h"
/********************************************************
函数名称:main
函数功能:主程序
入口参数:
出口参数:
修 改:
********************************************************/
void main(void)
{
Init_system();
/*灯初始化*****************************************************/
Init_system_leds();
/*timer初始化**************************************************/
Init_system_timer();
/*************************************************************/
Init_system_end();
//
while(1)
{
D401TOGGLE();
D402TOGGLE();
func_delay_ms(&delay_ms,1000);
}
}
主程序定时器.C文件文件中增加以下代码
定义delay函数和计数函数,delay函数用在主程序中,计数函数放在定时器0中,并定义一个delay结构体变量
//定时器中断0的中断服务函数
interrupt void CpuTimer0Isr(void)
{
func_delay_cnt(&delay_ms);
//============================================================
CpuTimer0Regs.TCR.bit.TIF = 1; //清除外设级中断标志位
PieCtrlRegs.PIEACK.bit.ACK1= 1; //清除PIE级中断应答
}
//定时器中断0的中断服务函数
interrupt void CpuTimer1Isr(void)
{
D400TOGGLE();
//============================================================
CpuTimer1Regs.TCR.bit.TIF = 1; //清除外设级中断标志位
PieCtrlRegs.PIEACK.bit.ACK1= 1; //清除PIE级中断应答
}
//=========================================================定时器实战
//定义结构体变量
TIME_struct delay_ms;
//时间节拍计时
void func_delay_ms(TIME_struct *delay_type,unsigned int timer)
{
delay_type->delay_cnt = 0;
delay_type->delay_cnt_flag = 1;
delay_type->delay_timer = timer;
while((delay_type->delay_cnt)<(delay_type->delay_timer))
{
//清看门狗 : 注意在有看门狗的工程时,必须在此处增加依据清看门狗的操作,防止程序复位执行异常
}
delay_type->delay_cnt_flag = 0;
delay_type->delay_cnt = 0;
}
//在定时器中进行定时判断的
void func_delay_cnt(TIME_struct *delay_type)
{
if(delay_type->delay_cnt_flag)
{
delay_type->delay_cnt +=1;
if((delay_type->delay_cnt)>65500)
{
delay_type->delay_cnt = 65500;
}
}
else
{
delay_type->delay_cnt = 0;
}
}
在定时器的.h文件中声明结构体及变量,声明定义的delay函数和计数函数
/*
* sys_timer.h
*
* Created on: 2024年4月16日
* Author:
*/
#ifndef APP_SYS_TIMER_H_
#define APP_SYS_TIMER_H_
//时间计数变量
typedef struct
{
unsigned char delay_cnt_flag;
unsigned int delay_cnt;
unsigned int delay_timer;
}TIME_struct;
extern TIME_struct delay_ms;
extern void Init_system_timer(void);
extern interrupt void CpuTimer0Isr(void);
extern interrupt void CpuTimer1Isr(void);
extern void func_delay_cnt(TIME_struct *delay_type);
extern void func_delay_ms(TIME_struct *delay_type,unsigned int timer);
#endif /* APP_SYS_TIMER_H_ */
以上就是一步一步实现定时器的步骤及说明,代码设计中一定要有工程概念,并从顶层分析设计。
总结
(1)工程结合第一节内容展开;
(2)引入定时器是为了精准的时间设计,涉及滤波,等待等精准延时与物联网的时间节拍如出一辙,将来分享涉及到物联网OS系统会一并说明;
(3)今天的可成代码以工程的形式提供,有兴趣的伙伴可以下载参考。
智能推荐
spring-cloud-hystrix之spring-cloud-1.3.4(Dalston.SR3)-boot(1.5.6) 学习笔记_springcloud dalston.sr3怎么引用-程序员宅基地
文章浏览阅读341次。spring-cloud-hystrix之spring-cloud-1.3.4(Dalston.SR3)-boot(1.5.6) 学习笔记概述hystrix可单独使用,也可与feign搭配使用,详见HystrixTargeter参考 https://fangjian0423.github.io/2017/02/19/springcloud-hystrix/http://blog.csdn.n_springcloud dalston.sr3怎么引用
ubuntu下将本地vscode编辑器通过ssh和远程服务器进行连接并使用远程的Python环境_ubuntu 通过 ssh 连接到远程服务器方便编辑代码的工具-程序员宅基地
文章浏览阅读991次。前言:在程序员的日常开发工作中,会遇到这样的情况,我们需要用自己本地的工作笔记本连接到大的服务器进行开发,因为大服务器的硬件性能强悍,有很多软件环境。我们在自己的笔记本进行开发需要用到这些软硬件环境,尤其在深度学习项目开发过程中,需要非常好的显卡,而显卡资源一般都部署在大服务器上。下面讲具体步骤:ssh和vscode的安装不再赘述,网上有很多教程。1,打开vscode编辑器,进入"扩展:商店":在搜索框里搜索Remote-SSH,下载好这个插件。2,点击左下角绿色部分"打开远程窗口",出现下图内容_ubuntu 通过 ssh 连接到远程服务器方便编辑代码的工具
GPU加速在前端的应用-程序员宅基地
文章浏览阅读3.2k次,点赞4次,收藏13次。概述GPU(Graphics Processing Unit) 图形处理单元,又称图形处理器,是我们所周知的显卡的核心部件,是显卡的“心脏”。按照字面意..._前台应用加速核心
C#串口通信从入门到精通(11)——串口接收的数据存储到本地文件(txt、csv)_读取并保存串口发送来的数据-程序员宅基地
文章浏览阅读4.3k次,点赞5次,收藏18次。本文详细介绍如何将串口通信将数据进行本次存储,主要介绍常用的csv、txt格式文件,由多年实战经验总结,绝对干货!_读取并保存串口发送来的数据
synchronized锁住的是什么?_如果为put方法加synchronized锁,锁住的是什么?是一个put还是所有put方法?-程序员宅基地
文章浏览阅读229次。对象锁:同步方法锁住的是对象A.一个对象+有多个synchronized方法:某一时刻内,只要有一个线程去调用其中一个synchronized 方法,其他的线程都要等待。B.一个对象中+synchronized方法+非synchronized方法:某个线程访问同步方法不影响其他线程访问非同步方法C.多个对象+多个同步方法:访问不同的对象的同步方法不会相互影响全局锁:静态同步方法锁的是当前的..._如果为put方法加synchronized锁,锁住的是什么?是一个put还是所有put方法?
outlook邮箱邮件内容乱码_邮件标题乱码问题解决一例-程序员宅基地
文章浏览阅读2.5k次。最近有用户反馈在mac下通过airmail、outlook这样的邮件客户端查看系统发出邮件的标题显示为乱码,但是windows下正常。通过邮件客户端保存为eml,用sublime text 2打开,可以发现展示为以下效果:Date: Wed, 01 Jul 2015 19:54:57 +0800From: To: "=?GBK?B?zt6+zA==?=" Subject: [MTLÑз¢Ö§³Å..._outlook 2013 转发邮件 乱码
随便推点
Vue组件-程序员宅基地
文章浏览阅读2.8k次,点赞86次,收藏44次。在这一小节中,重点要理解的就是组件的编程思想。组件表示页面中的部分功能(包含自己的逻辑与样式),可以组合多个组件实现完整的页面功能。问题是,如何确定页面中哪些内容划分到一个组件中呢?你可以将组件当作一种函数或者是对象来考虑(函数的功能是单一的),根据[单一功能原则]来判定组件的范围。也就是说,一个组件原则上只能负责一个功能。如果它需要负责更多的功能,这时候就应该考虑将它拆分成更小的组件。定义:组件是可复用的Vue实例,准确讲它是的实例,继承自Vue分类:有状态组件(有data属性),
Springer期刊 latex投稿经验分享(包含latex模板)_投期刊要求latex-程序员宅基地
文章浏览阅读7.1k次。Springer期刊 latex投稿经验分享_投期刊要求latex
PLM助力国防军工制造业工艺数字化-程序员宅基地
文章浏览阅读192次。1制造业数字化工艺目标1) 通过PLM项目的实施能够理顺企...
攻防_漏洞_文件包含_文件包含漏洞详解_ctf 文件包含-程序员宅基地
文章浏览阅读3.7k次,点赞5次,收藏17次。文件包含漏洞详解_ctf 文件包含
javaweb-java占位符的使用_%x java-程序员宅基地
文章浏览阅读970次。文章目录java占位符具体使用搭配转换符的标志java占位符拼接字符串显示十分麻烦,因此java中存在大量占位符用来规范输出诸如:String.format("0.5(-%d)+", i),类似c语言的printf方法,比“0.5(-”+…更加简洁易懂String类的format()方法具体使用format(String format, Object… args) 新字符串使用本地语言环境,制定字符串格式和参数生成格式化的新字符串。format(Locale locale, String fo_%x java
【深度学习基础】反向传播BP算法原理详解及实战演示(附源码)_反向传播算法-程序员宅基地
文章浏览阅读2.8k次,点赞34次,收藏48次。【深度学习基础】反向传播BP算法原理详解及实战演示(附源码)_反向传播算法