无人机基础知识:多旋翼无人机自动控制原理与算法_无人机协调行为算法怎么学习-程序员宅基地
技术标签: 算法 1024程序员节 无人机 PID 自动控制
前言
无人机(Unmanned Aerial Vehicle),指的是一种由动力驱动的、无线遥控或自主飞行、机上无人驾驶并可重复使用的飞行器,飞机通过机载的计算机系统自动对飞行的平衡进行有效的控制,并通过预先设定或飞机自动生成的复杂航线进行飞行,并在飞行过程中自动执行相关任务和异常处理。

在前面的文章中,我们分析了多旋翼无人机的飞行原理及飞行模式。
链接
在最后的飞行模式中, 除了纯手动模式外,简单解释了其它模式如姿态模式的原理,其中一笔带过就是形成了闭环控制,所以稳定。
本篇文章,我们就来仔细分析下其中的闭环控制,和控制的原理。
无人机自动控制器
对于一架具备自动飞行能力的无人机来说,控制器设计是其中最为重要的工作之一。
对于无人机来说:
控制的目标是实现对无人机的姿态跟踪、速度跟踪、定点跟踪、路径跟踪、轨迹跟踪。
在无人机的实际应用中,我们会根据实际使用需求设计一些飞行模式,比如姿态模式、悬停模式、自动航线模式等,这些模式从控制的本质上来讲就是给飞行器状态期望,让其以给定的期望状态飞行。比如姿态模式,一般是通过遥控器输出俯仰角期望、滚转角期望、偏航角速率期望、油门期望,然后控制器通过控制各电机油门实现对上述期望的跟踪。
多旋翼飞行器作为我们的控制对象,以四旋翼为例
其控制输入是:四个电机的转速
控制输出是其飞行状态,包括:
- 位置
- 速度
- 姿态
- 角速度
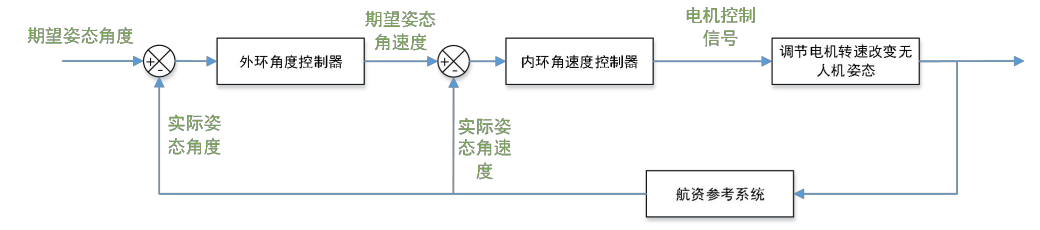
多旋翼飞行器建模建立的数学模型,它是一个高阶系统,在设计控制器的时候采用了内外环的结构,外环的控制输出作为内环的控制输入。
以其中的姿态控制为例,其控制框图如下:
对于其中的控制器,控制算法发展到现在有很多种,例如:自适应控制、反步滑膜控制、自抗扰控制等。
但是以上方法多为理论分析和数值分析,在飞控的设计中,多使用 相对成熟的PID控制算法。
PID控制算法
PID控制简介:
PID( Proportional Integral Derivative)控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于工业过程控制,尤其适用于可建立精确数学模型的确定性控制系统。
PID控制器的优点:
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节,它实际上是一种算法。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
PID控制器的不足:
在实际生产现场中,由于受到参数整定方法烦杂的困扰,常规PID控制器参数往往整定不良、效果欠佳,对运行工况的适应能力很差。
PID控制器各校正环节:
任何闭环控制系统的首要任务是要稳(稳定)、快(快速)、准(准确)的响应命令。PID调整的主要工作就是如何实现这一任务。
-
比例环节
成比例地反映控制系统的偏差信号e(t),偏差一旦产生,控制器立即产生控制作用,以减小偏差。当仅有比例控制时系统输出存在稳态误差 -
积分环节
控制器的输出与输入误差信号的积分成正比关系。主要用于消除静差,提高系统的无差度。 -
微分环节
反映偏差信号的变化趋势,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
控制参数整定:
增大比例系数P将加快系统的响应,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现,过大的比例系数会使系统有比较大的超调,并产生振荡,使稳定性变坏。积分能在比例的基础上消除余差,它能对稳定后有累积误差的系统进行误差修整,减小稳态误差。微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果,它可以使系统超调量减小,稳定性增加,动态误差减小。
时域计算公式如下:

PID的信号框图
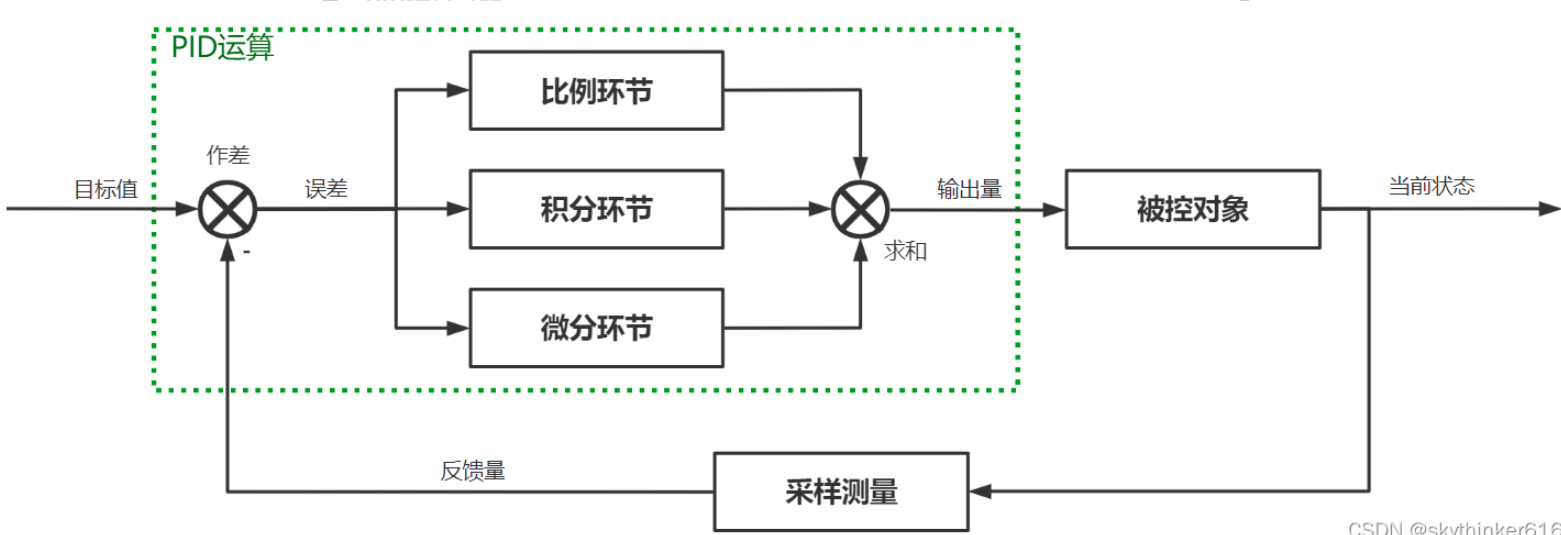
上图就是PID的信号框图,表示了PID的运行过程:
为系统指定一个目标值
PID将目标值与被控对象当前的反馈量作差得到误差
PID将误差值分别经过三个环节计算得到输出分量,三个分量加起来得到PID的输出
将PID的输出施加到被控对象上,使反馈量向目标值靠拢
串级PID:
上面所说的算法其实就是单级PID,目标值和反馈值经过一次PID计算就得到输出值并直接作为控制量,如果目标物理量和输出物理量直接不止差了一阶的话,中间阶次的物理量我们是无法控制的。
而串级PID就可以改善这一点。串级PID其实就是两个单级PID“串”在一起组成的,它的信号框图如下:
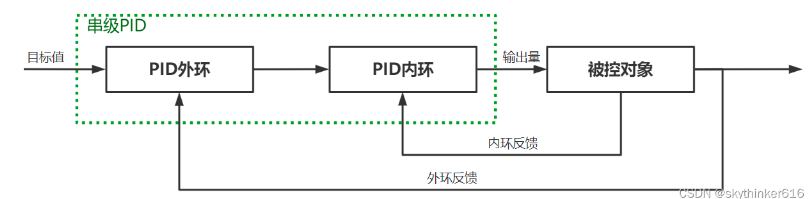
图中的外环和内环就分别是一个单级PID,每个单级PID就如我们之前所说,需要获取一个目标值和一个反馈值,然后可以产生一个输出值。串级PID中两个环相“串”的方式就是将外环的输出作为内环的目标值。
智能推荐
WIndows下使用Qemu安装Arm版Kylin系统_qemu_kylin_efi.fd-程序员宅基地
文章浏览阅读8.7k次,点赞10次,收藏51次。提示:转载请注明出处文章目录前言一、Qemu是什么?二、操作步骤1.环境准备(1).qemu安装(2).QEMU_EFI.fd:镜像启动时的BIOS。(3).ARM系统的.iso镜像:(4).制作镜像(5).准备目录2.安装虚拟机3.启动虚拟机总结问题描述:前言随着国产化的浪潮一步一步的加大,我们接触的国产系统和国产硬件也在不断的增多,忍不住的吐槽,现在的硬件是真的倒退了好多年,而且也特别的贵,但是为支持国产,我们也需要更多的进行国产化的适配和学习,linux下搭建比较简单,windows则比较复_qemu_kylin_efi.fd
OneNote 找回误删除笔记_onenote已删除的笔记-程序员宅基地
文章浏览阅读6k次。真的OneNote的这个设计差点没吓死我,还好最终找到了。百度很多方法都不好使。1.去OneNote online 就是web端的OneNote2.点击告诉我们你要做什么3.点击已删除页面这样就找到了,实测iPad端删除这里能找回..._onenote已删除的笔记
Umi2.x升级到Umi3.x_node 多少版本对应的umi3-程序员宅基地
文章浏览阅读6.9k次,点赞5次,收藏7次。Umi3.x升级版本之路(一)修改依赖扁平化配置import all from umi修正语法支持antd4.x修改依赖npm uninstall -S dva antdnpm uninstall -D umi-plugin-react npm install -D umi@3 @umijs/preset-react// package.json"engines": { "node": ">=10.13.0"}// tsconfig.json"paths": { "@/*":_node 多少版本对应的umi3
【论文阅读】【三维目标检测】在Range view上做3D目标检测_rangeview-程序员宅基地
文章浏览阅读3.3k次,点赞10次,收藏22次。文章目录BEV or Range ViewRangeDet: In Defense of Range View for LiDAR-based 3D Object DetectionRange Conditioned Pyramid InMeta-Kernel ConvolutionWeighted Non-Maximum SuppressionData Augmentation in Range View DataExperimentrange view是仅针对物理旋转式扫描的激光雷达的特殊view,例_rangeview
shell 实现并发,并控制并发数量_shell 并发-程序员宅基地
文章浏览阅读4k次,点赞4次,收藏26次。为了方便理解,一步步的来首先先看一下串行的:#! /bin/bashST=$(date +%s)for i in $(seq 1 10)do echo $i sleep 1 # 模拟程序、命令doneET=$(date +%s)TIME=$(( ${ET} - ${ST} ))echo "time: ${TIME}"输出结果:12345678910time: 10这就最原始的进程运行模拟,串行方式,无法有效利用计算机的资源,_shell 并发
Mybatis-puls自动分页Page无法分页解决_使用mybatis-plus中page进行分页不生效-程序员宅基地
文章浏览阅读3.3k次,点赞3次,收藏5次。一开始使用Page时发现数据能出来但是无法分页,只能全部显示。打印数据出来也显示0。最后查了许多资料发现这个插件需要一个工具类的支持才可以实现。检查了一下代码发现也没有问题。最后更改完成测试,好使了。_使用mybatis-plus中page进行分页不生效
随便推点
AS5045磁旋转编码器使用以及STM32接收学习心得(另modbus协议、RS485接口、RS485转TTL说明)-程序员宅基地
文章浏览阅读5.2k次,点赞8次,收藏40次。一、电气接口1、5V供电,1:VDD5;2:A;3: B;4:GND2、板子上没有配终端电阻,需要自己根据应用需要配电阻3、板子外径30mm,安装孔内径2.7mm,可配2.5的螺钉,两孔中心间距21mm.二、RS485接口通信协议编码器485波特率范围:1200-57600,可以根据具体实际请款设置波特率,默认设率9600,8,n,1。三、modbus通信协议格式(1)、moubus协议概要1、Modbus协议是一种单主/多从的通信协议,其特点是在同一时间,总线上只能有一个主设备,但可以_rs485转ttl
在阿里云CentOS7上搭建ftp服务器_阿里云centos配置ftp-程序员宅基地
文章浏览阅读3.5k次。当我再次被各种出站入站规则玩弄,在搜索引擎的帮助走出泥淖后,我决定记下这次经历_阿里云centos配置ftp
ARM Linux 3.x的设备树(Device Tree)-程序员宅基地
文章浏览阅读102次。2019独角兽企业重金招聘Python工程师标准>>> ..._error: include/dt-bindings/power/xlnx-zynqmp-power.h
使用JavaScript制作动态网页-2_javascript实现同个窗口的动态网页-程序员宅基地
文章浏览阅读1.8k次,点赞2次,收藏15次。使用JavaScript制作动态网页-2表单验证<!DOCTYPE html><html lang="en"><head> <meta charset="UTF-8"> <title>表单验证</title></head><body> <form action="..._javascript实现同个窗口的动态网页
Ubuntu20.04解决应用中心打不开的问题_snap商店打不开-程序员宅基地
文章浏览阅读1.5w次,点赞9次,收藏76次。Ubuntu20.04软件中心打不开 尝试了很多方法 Ubuntu 20.04 默认把软件中心换成了 snap, 感觉 snap 应用老出状况, snap 应用不但体积大, 安装好的应用还不时就崩溃, 所以如果要把电脑里的所有 snap 应用全部替换了, snapd 也卸载了. 下面这三句可以有效的解决 sudo apt install ubuntu-software sudo sn..._snap商店打不开
C语言-数据结构-栈-实验报告_数据结构栈的应用实验报告-程序员宅基地
文章浏览阅读6.5k次,点赞8次,收藏70次。实验报告内容:一、实验目的、要求:(1)熟练掌握栈的特点(先进后出FILO)及基本操作,如入栈、出栈等,栈的顺序存储结构和链式存储结构,以便在实际问题背景下灵活应用。(2)编写适当的主函数和相关函数,使实验题目运行出正确结果。(3)当场编程、调试、编译。(4)程序具有一定的健壮性、可读性,尽量简洁。(5)程序运行完成后分别存盘,上交实验报告,要求写出实验体会二、实验内容:(1)实验题目(2)主要函数的算法设计思想(3)程序清单(3)测试数据、实验结果及结论(4)实验体会(实验中存在的_数据结构栈的应用实验报告