stm32毕设分享 stm32与openmv的目标跟踪系统-程序员宅基地
技术标签: 单片机
文章目录
- 0 前言
- 课题简介
- 设计框架
- 3 硬件设计
- 4 软件设计
-
* 对被测物体的识别- 判断被测物体所在区域
- 5 最后
0 前言
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
基于stm32与openmv的目标跟踪系统
学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
项目详细描述地址:
https://www.zhihu.com/people/51-81-23-36/zvideos
课题简介
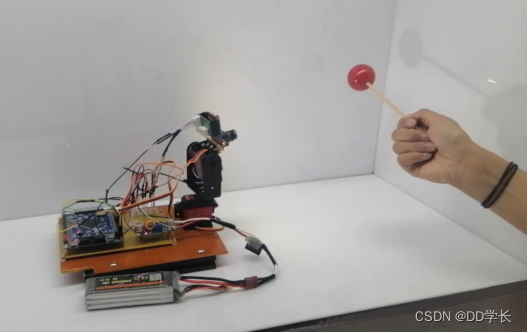
随着智能化技术的迅猛发展,网络智能视频监控系统也得到了广泛的应用。视频监控系统经历了从模拟化向数字化、网络化、智能化的发展过程,目标检测和跟踪技术是计算机视觉的重要组成部分,也是实现监控系统智能化的基础,因其广泛的应用前景而成为近年来的研究热点。本文通过OpenMV作为是识别模块去识别被测物体(以红色小球为例),当其识别到红色小球后,判断小球中心点所在的区域信息,并将其区域标志位通过串口发送给STM32,当STM32接收到位置信息后对x轴、y轴的两个舵机参数进行操作,最后通过定时器输出合适的PWM波,控制舵机旋转相应的角度,使OpenMV摄像头对准被测物体,以实现物体追踪功能。
设计框架
主要分为两个方面:一个是OpenMV识别部分,另一个是STM32控制部分。通过OpenMV对被测物体进行捕捉,所用的被测物体为红色小球,OpenMV编程时,先对红色的色域进行调整,在识别到红色后,对红色进行判断,判断出识别区域中红色区域最大的部分,此举在过滤掉背景中存在小部分红色区域,造成对识别的干扰,识别到红色小球后,用矩形框将其框住,并显示矩形框的中心位置,判断中心位置所在区域,并将区域的标志信息会通过串口传递给STM32,STM32接收到数据后进行相应动作,使定时器输出PWM波,控制舵机旋转相应的角度,使OpenMV摄像头对准被测物体,以实现物体追踪功能。主要研究内容如下:
- 1.通过OpenMV识别出被测物体(以红色小球为例)。
- 2.在OpenMV识别出目标物体后,判断物体所在区域,将区域信息通过串口传输给STM32。
- 3.利用STM32的串口部分的应用及原理知识,对接收到的数据进行处理。
- 4.利用STM32的应用及原理知识,对处理好的数据进行判断后,对舵机进行控制。
- 5.利用STM32的定时器部分和PWM控制的应用及原理知识,控制舵机,使其转动适当角度,使OpenMV对准目标物体。主控制图如图所示。
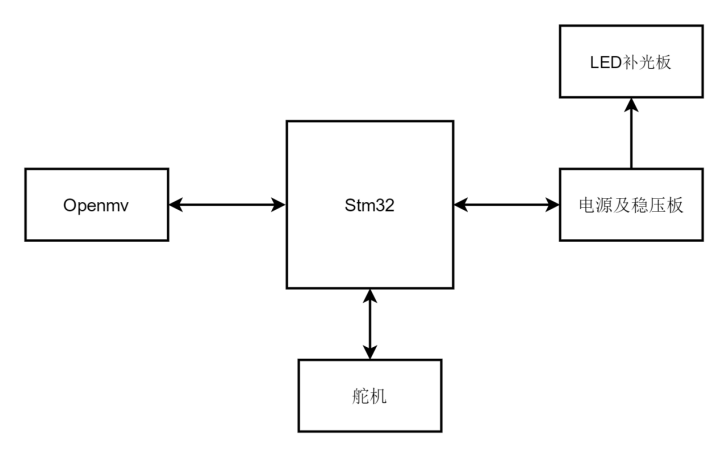
舵机控制逻辑
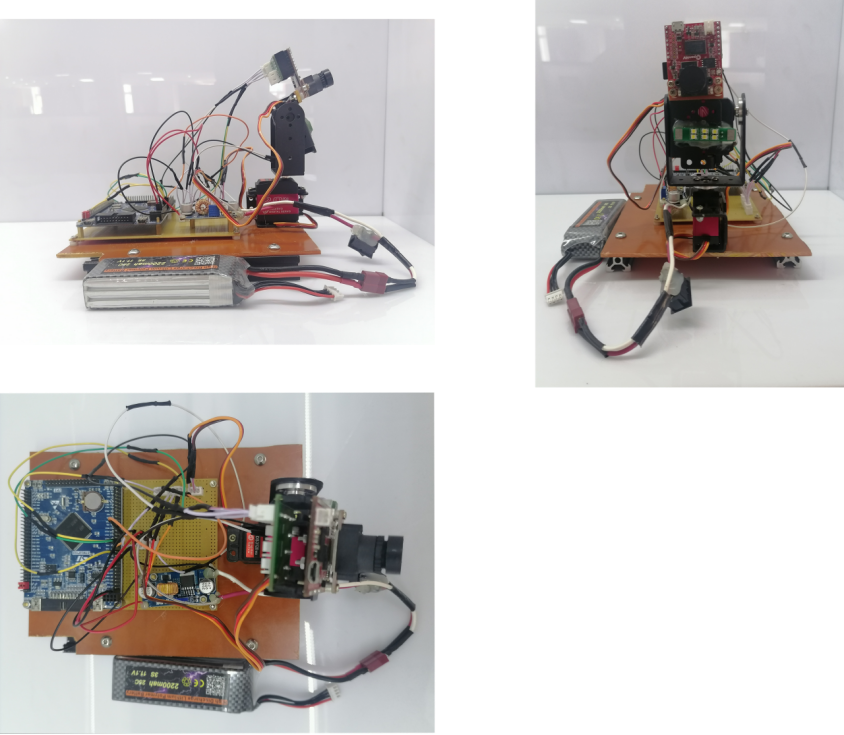
3 硬件设计
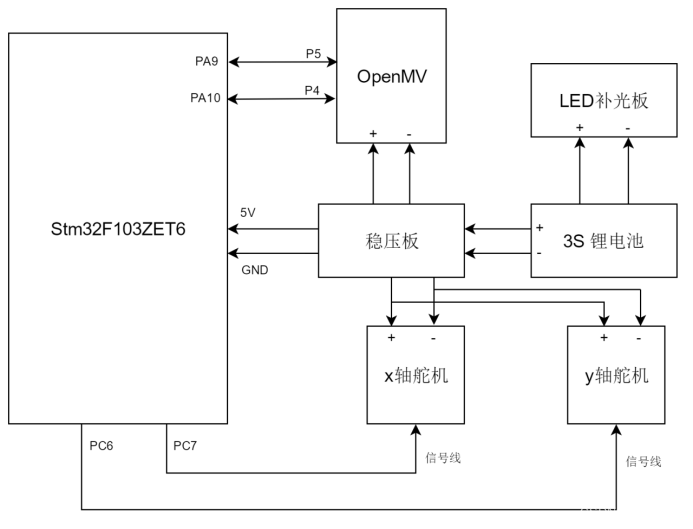
硬件连接部分使用杜邦线连接,连接如下:3S锂电池接稳压板输入端以及直接给LED补光板供电,稳压板输出端接OpenMV的VIN和GND引脚、STM32的5V和GND引脚以及两个舵机的正(红色)负(棕色)极。OpenMV的P4引脚(串口3的TX)接STM32的PA10引脚(串口1的RX),OpenMV的P5引脚(串口3的RX)接STM32的PA9引脚(串口1的TX),STM32的PC7引脚(定时器3通道2)接x轴的舵机的信号线(橙黄色),STM32的PC7引脚(定时器3通道1)接y轴的舵机的信号线(橙黄色)。
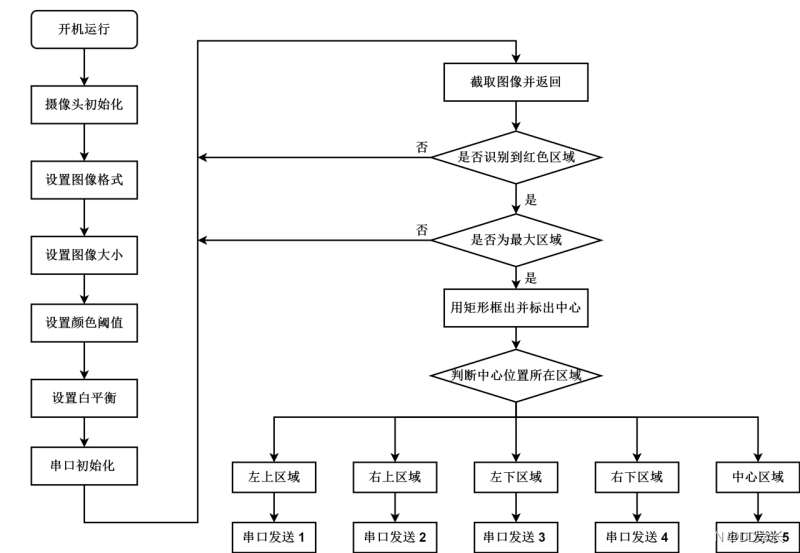
4 软件设计
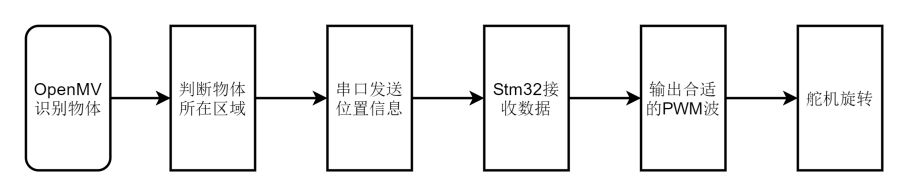
软件部分的功能主要分为两部分,一个是OpenMV部分,另一是STM32部分,OpenMV主要实现功能:完成被测物体的识别、寻找最大色块区域、判断被测物体所在区域、通过串口发送被测物体的位置信息。STM32部分主要实现功能:使用串口接收OpenMV发来的数据、通过定时器输出PWM波、以及实现控制舵机旋转追踪的目的。
整体逻辑
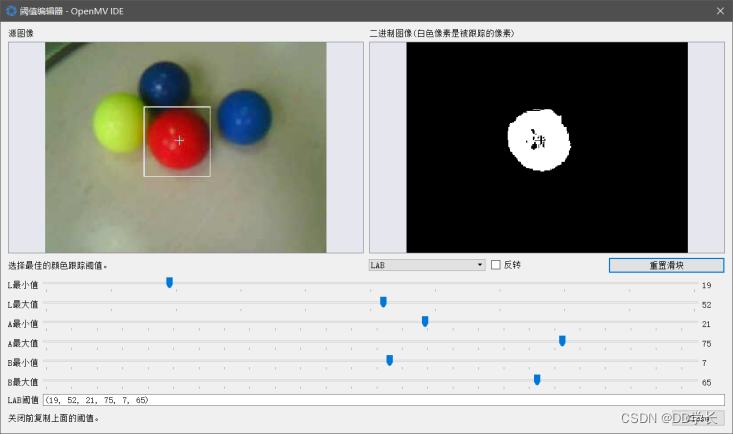
对被测物体的识别
本设计中被测物体为一个红色小球,因此对于物体的识别主要为颜色识别,在编程中首先需要对OpenMV的红色的阈值进行调整,意在告诉OpenMV“什么是红色”,打开阈值编辑器,对LAB的阈值进行调整,使二进制图像中只有红色区域的映像
import sensor, image, time, pyb
ensor.reset() # 初始化摄像头传感器.
sensor.set_pixformat(sensor.RGB565) # 使用RGB565.
sensor.set_framesize(sensor.QVGA) # 分辨率:320*240
sensor.skip_frames(10) # 让新设置生效.
sensor.set_auto_whitebal(False) # 关闭自动白平衡.
clock = time.clock() # Tracks FPS.
red_threshold = (14, 68, 11, 70, 9, 56) #红色阈值设定
while(True):
img = sensor.snapshot() # 拍照并返回图像.
blobs = img.find_blobs([red_threshold])
img.draw_rectangle(blobs)
img.draw_cross(blobs.cx(), blobs.cy())
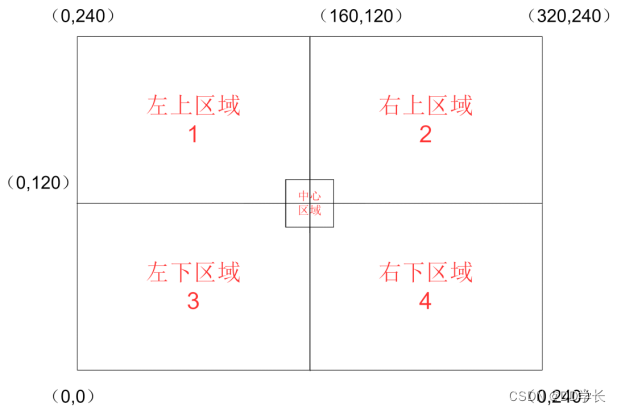
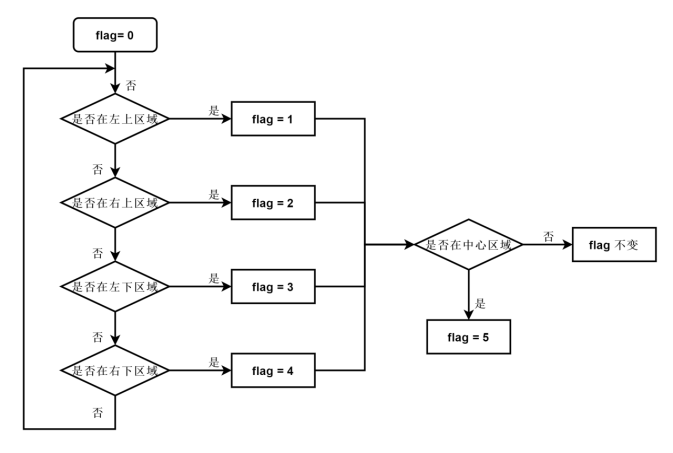
判断被测物体所在区域
import sensor, image, time, pyb
from pyb import UART
red_threshold = (14, 68, 11, 70, 9, 56) #红色阈值设定
sensor.reset() # 初始化摄像头传感器.
sensor.set_pixformat(sensor.RGB565) # 使用RGB565.
sensor.set_framesize(sensor.QVGA) # 使用QVGA.
sensor.skip_frames(10) # 让新设置生效.
sensor.set_auto_whitebal(False) # 关闭自动白平衡.
clock = time.clock() # Tracks FPS.
uart = UART(3, 115200)
def find_max(blobs):
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
led = pyb.LED(1)
while(True):
img = sensor.snapshot() # 拍照并返回图像.
blobs = img.find_blobs([red_threshold])
x_max = 320
x_min = 0
x_1 = 115
x_2 = 185
y_max = 240
y_min = 0
y_1 = 95
y_2 = 145
if blobs:
max_blob=find_max(blobs)
print('sum :', len(blobs))
img.draw_rectangle(max_blob.rect())
img.draw_cross(max_blob.cx(), max_blob.cy())
if max_blob.cx()>= x_min and max_blob.cx() <= x_1 and\
max_blob.cy() >= y_2 and max_blob.cy() <= y_max :
flag = 1
if max_blob.cx()>= x_2 and max_blob.cx() <= x_max and\
max_blob.cy() >= y_2 and max_blob.cy() <= y_max :
flag = 2
if max_blob.cx()>= x_min and max_blob.cx() <= x_1 and\
max_blob.cy() >= y_min and max_blob.cy() <= y_1 :
flag = 3
if max_blob.cx()>= x_2 and max_blob.cx() <= x_max and \
max_blob.cy() >= y_min and max_blob.cy() <= y_1 :
flag = 4
if max_blob.cx()> x_1 and max_blob.cx() < x_2 and\
max_blob.cy() > y_1 and max_blob.cy() < y_2 :
flag = 5
output_str="%d" %flag
led.on()
print('you send:',output_str)
uart.write(output_str+'\r\n')
else:
print('not found!')
led.off()
STM32程序:
main.c:
#include "STM32f10x.h"
#include "control.h"
#include "Systick.h"
#include "usart.h"
#include "pwm.h"
int main()
{
Systick_init(72);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组
USART1_Init(115200);
TIM3_CH2_PWM_Init(20000-1,72-1); //20ms
TIM3_CH1_PWM_Init(20000-1,72-1);
//舵机角度参数:19500-17500(前者为0°,后者为180°)
TIM_SetCompare2(TIM3,19500);//x轴角度初始化,下面的舵机。
TIM_SetCompare1(TIM3,18700);//y轴角度初始化,上面的舵机。
Delay(2500);
while(1);
}
pwm.c:
#include "pwm.h"
void TIM3_CH2_PWM_Init(u16 per,u16 psc)//控制x轴舵机(引脚:PC7)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* 开启时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
/* GPIO配置 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_Init(GPIOC,&GPIO_InitStructure);
/* GPIO重映射 */
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);//改变指定管脚的映射
TIM_TimeBaseInitStructure.TIM_Period=per; //自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler=psc; //分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
/* PWM参数配置 */
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;
TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;
TIM_OC2Init(TIM3,&TIM_OCInitStructure); //输出比较通道2初始化
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3,ENABLE);//使能预装载寄存器
TIM_Cmd(TIM3,ENABLE); //使能定时器
}

智能推荐
攻防世界_难度8_happy_puzzle_攻防世界困难模式攻略图文-程序员宅基地
文章浏览阅读645次。这个肯定是末尾的IDAT了,因为IDAT必须要满了才会开始一下个IDAT,这个明显就是末尾的IDAT了。,对应下面的create_head()代码。,对应下面的create_tail()代码。不要考虑爆破,我已经试了一下,太多情况了。题目来源:UNCTF。_攻防世界困难模式攻略图文
达梦数据库的导出(备份)、导入_达梦数据库导入导出-程序员宅基地
文章浏览阅读2.9k次,点赞3次,收藏10次。偶尔会用到,记录、分享。1. 数据库导出1.1 切换到dmdba用户su - dmdba1.2 进入达梦数据库安装路径的bin目录,执行导库操作 导出语句:./dexp cwy_init/[email protected]:5236 file=cwy_init.dmp log=cwy_init_exp.log 注释: cwy_init/init_123..._达梦数据库导入导出
js引入kindeditor富文本编辑器的使用_kindeditor.js-程序员宅基地
文章浏览阅读1.9k次。1. 在官网上下载KindEditor文件,可以删掉不需要要到的jsp,asp,asp.net和php文件夹。接着把文件夹放到项目文件目录下。2. 修改html文件,在页面引入js文件:<script type="text/javascript" src="./kindeditor/kindeditor-all.js"></script><script type="text/javascript" src="./kindeditor/lang/zh-CN.js"_kindeditor.js
STM32学习过程记录11——基于STM32G431CBU6硬件SPI+DMA的高效WS2812B控制方法-程序员宅基地
文章浏览阅读2.3k次,点赞6次,收藏14次。SPI的详情简介不必赘述。假设我们通过SPI发送0xAA,我们的数据线就会变为10101010,通过修改不同的内容,即可修改SPI中0和1的持续时间。比如0xF0即为前半周期为高电平,后半周期为低电平的状态。在SPI的通信模式中,CPHA配置会影响该实验,下图展示了不同采样位置的SPI时序图[1]。CPOL = 0,CPHA = 1:CLK空闲状态 = 低电平,数据在下降沿采样,并在上升沿移出CPOL = 0,CPHA = 0:CLK空闲状态 = 低电平,数据在上升沿采样,并在下降沿移出。_stm32g431cbu6
计算机网络-数据链路层_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏8次。数据链路层习题自测问题1.数据链路(即逻辑链路)与链路(即物理链路)有何区别?“电路接通了”与”数据链路接通了”的区别何在?2.数据链路层中的链路控制包括哪些功能?试讨论数据链路层做成可靠的链路层有哪些优点和缺点。3.网络适配器的作用是什么?网络适配器工作在哪一层?4.数据链路层的三个基本问题(帧定界、透明传输和差错检测)为什么都必须加以解决?5.如果在数据链路层不进行帧定界,会发生什么问题?6.PPP协议的主要特点是什么?为什么PPP不使用帧的编号?PPP适用于什么情况?为什么PPP协议不_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输
软件测试工程师移民加拿大_无证移民,未受过软件工程师的教育(第1部分)-程序员宅基地
文章浏览阅读587次。软件测试工程师移民加拿大 无证移民,未受过软件工程师的教育(第1部分) (Undocumented Immigrant With No Education to Software Engineer(Part 1))Before I start, I want you to please bear with me on the way I write, I have very little gen...
随便推点
Thinkpad X250 secure boot failed 启动失败问题解决_安装完系统提示secureboot failure-程序员宅基地
文章浏览阅读304次。Thinkpad X250笔记本电脑,装的是FreeBSD,进入BIOS修改虚拟化配置(其后可能是误设置了安全开机),保存退出后系统无法启动,显示:secure boot failed ,把自己惊出一身冷汗,因为这台笔记本刚好还没开始做备份.....根据错误提示,到bios里面去找相关配置,在Security里面找到了Secure Boot选项,发现果然被设置为Enabled,将其修改为Disabled ,再开机,终于正常启动了。_安装完系统提示secureboot failure
C++如何做字符串分割(5种方法)_c++ 字符串分割-程序员宅基地
文章浏览阅读10w+次,点赞93次,收藏352次。1、用strtok函数进行字符串分割原型: char *strtok(char *str, const char *delim);功能:分解字符串为一组字符串。参数说明:str为要分解的字符串,delim为分隔符字符串。返回值:从str开头开始的一个个被分割的串。当没有被分割的串时则返回NULL。其它:strtok函数线程不安全,可以使用strtok_r替代。示例://借助strtok实现split#include <string.h>#include <stdio.h&_c++ 字符串分割
2013第四届蓝桥杯 C/C++本科A组 真题答案解析_2013年第四届c a组蓝桥杯省赛真题解答-程序员宅基地
文章浏览阅读2.3k次。1 .高斯日记 大数学家高斯有个好习惯:无论如何都要记日记。他的日记有个与众不同的地方,他从不注明年月日,而是用一个整数代替,比如:4210后来人们知道,那个整数就是日期,它表示那一天是高斯出生后的第几天。这或许也是个好习惯,它时时刻刻提醒着主人:日子又过去一天,还有多少时光可以用于浪费呢?高斯出生于:1777年4月30日。在高斯发现的一个重要定理的日记_2013年第四届c a组蓝桥杯省赛真题解答
基于供需算法优化的核极限学习机(KELM)分类算法-程序员宅基地
文章浏览阅读851次,点赞17次,收藏22次。摘要:本文利用供需算法对核极限学习机(KELM)进行优化,并用于分类。
metasploitable2渗透测试_metasploitable2怎么进入-程序员宅基地
文章浏览阅读1.1k次。一、系统弱密码登录1、在kali上执行命令行telnet 192.168.26.1292、Login和password都输入msfadmin3、登录成功,进入系统4、测试如下:二、MySQL弱密码登录:1、在kali上执行mysql –h 192.168.26.129 –u root2、登录成功,进入MySQL系统3、测试效果:三、PostgreSQL弱密码登录1、在Kali上执行psql -h 192.168.26.129 –U post..._metasploitable2怎么进入
Python学习之路:从入门到精通的指南_python人工智能开发从入门到精通pdf-程序员宅基地
文章浏览阅读257次。本文将为初学者提供Python学习的详细指南,从Python的历史、基础语法和数据类型到面向对象编程、模块和库的使用。通过本文,您将能够掌握Python编程的核心概念,为今后的编程学习和实践打下坚实基础。_python人工智能开发从入门到精通pdf