果蝇优化算法(Fruit Fly Optimization Algorithm,FOA)-Matlab源码_潘文超果蝇优化算法-程序员宅基地

获取更多资讯,赶快关注上面的公众号吧!
文章目录
果蝇优化算法(Fruit Fly Optimization Algorithm,FOA)
2011年台湾亚东技术学院的潘文超受果蝇觅食行为的启发,提出了一种的全局优化算法—果蝇优化算法(Fruit Fly Optimization Algorithm,FOA)。该算法的优点在于计算过程简单、易于编码实现和易于理解等。关注公众号,后台回复“果蝇”或“FOA”获取Matlab源码!
启发
果蝇本身在感觉和感知方面优于其他物种,尤其是在嗅觉和视觉方面,如图1所示。
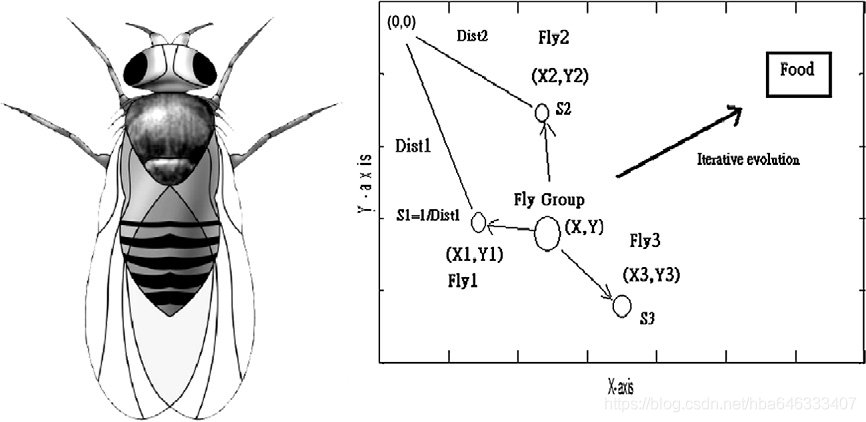
果蝇的嗅觉器官能发现空气中漂浮的各种气味;它甚至能闻到40公里外的食物。然后,当它接近食物位置,也可以用它灵敏的视觉找到食物和同伴聚集的位置,并朝那个方向飞行。
初始化
首先随机初始化果蝇种群位置InitX_axis和InitY_axis。
食物搜索
通过嗅觉给出果蝇寻找食物的随机方向和距离:
X i = X − a x i s + R a n d o m V a l u e X_i=X_{-}axis+RandomValue Xi=X−axis+RandomValue
Y i = X − a x i s + R a n d o m V a l u e Y_i=X_{-}axis+RandomValue Yi=X−axis+RandomValue
计算味道浓度判定值
由于无法得知食物位置,因此先估计与原点的距离 D i s t i Dist_i Disti,再计算味道浓度判定值 s i s_i si,此值为距离倒数:
Dist i = X i 2 + Y i 2 \text { Dist }_{i}=\sqrt{X_{i}^{2}+Y_{i}^{2}} Dist i=Xi2+Yi2
S i = 1 / Dist i S_{i}=1 / \text { Dist }_{i} Si=1/ Dist i
适应度评估
将味道浓度判定值 s i s_i si。代入味道浓度判定函数(或称为适应度函数fitness function),用来求出果蝇个体位置的味道浓度 S m e l l i Smell_i Smelli:
S m e l l i = F u n c t i o n ( S i ) Smell_i=Function(S_i) Smelli=Function(Si)
确定最优个体
找出该果蝇群体中味道浓度最低的果蝇(最优个体);
[ bestSmell bestindex ] = min ( Smell i ) [\text { bestSmell bestindex }]=\min \left(\text { Smell }_{i}\right) [ bestSmell bestindex ]=min( Smell i)
飞行
记录并保留最佳味道浓度值bestSmell与其x、y坐标,此时果蝇群体利用视觉向该位置飞去:
Smellbest = bestSmell \text { Smellbest = bestSmell } Smellbest = bestSmell
X axis = X ( bestindex ) X_{\text {axis }}=X(\text { bestindex }) Xaxis =X( bestindex )
Y axis = Y ( bestindex ) Y_{\text {axis }}=Y(\text { bestindex }) Yaxis =Y( bestindex )
循环
重复执行食物搜索、计算味道浓度判定值、应度评估、定最优个体,并判断最佳味道浓度是否优于前一迭代最佳味道浓度。若当前迭代次数小于最大迭代数Maxgen,则执行飞行。
Matlab代码
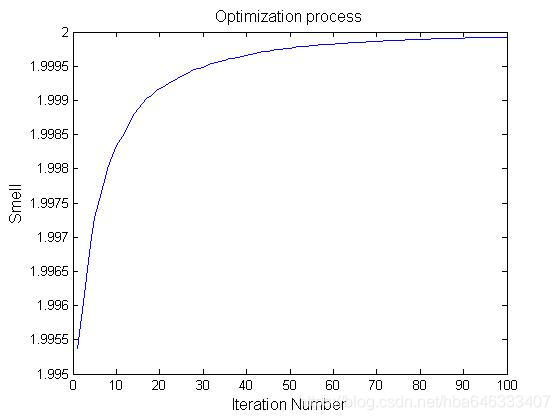
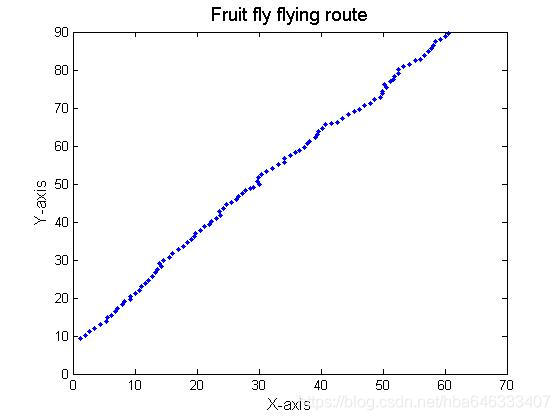
FOA求 Y = 2 − X 2 Y=2-X^2 Y=2−X2极大值
%***設置參數
%清空運行環境
clc
clear
%速度更新參數
X_axis=10*rand();
Y_axis=10*rand();
maxgen=100; %疊代次數
sizepop=20; %種群規模
%個體和速度最大和最小值
for i=1:sizepop
X(i)=X_axis+2*rand()-1;
Y(i)=Y_axis+2*rand()-1;
D(i)=(X(i)^2+Y(i)^2)^0.5;
S(i)=1/D(i);
%類似Fitness適應度函數
Smell(i)=2-S(i)^2;
end
%***根據初始味道濃度值尋找極值
[bestSmell bestindex]=max(Smell);
%***保留最佳值位置
X_axis=X(bestindex);
Y_axis=Y(bestindex);
Smellbest=bestSmell;
%***根據公式更新粒子位置和速度,並且根據新粒子的適應度值更新個體極值和群體極值
%疊代尋優
for g=1:maxgen
%粒子位置和速度更新
for i=1:sizepop
X(i)=X_axis+2*rand()-1;
Y(i)=Y_axis+2*rand()-1;
D(i)=(X(i)^2+Y(i)^2)^0.5;
S(i)=1/D(i);
%類似Fitness適應度函數
Smell(i)=2-S(i)^2;
end
%***根據初始味道濃度值尋找極值
[bestSmell bestindex]=max(Smell);
%***保留最佳值位置
if bestSmell>Smellbest
X_axis=X(bestindex);
Y_axis=Y(bestindex);
Smellbest=bestSmell;
end
%每代最優值紀錄到yy數組中
yy(g)=Smellbest;
Xbest(g)=X_axis;
Ybest(g)=Y_axis;
end
%***繪製最佳化個體適應度值趨勢圖
figure(1)
plot(yy)
title('Optimization process','fontsize',12)
xlabel('Iteration Number','fontsize',12);ylabel('Smell','fontsize',12);
figure(2)
plot(Xbest,Ybest,'b.');
title('Fruit fly flying route','fontsize',14)
xlabel('X-axis','fontsize',12);ylabel('Y-axis','fontsize',12);
结果如下:
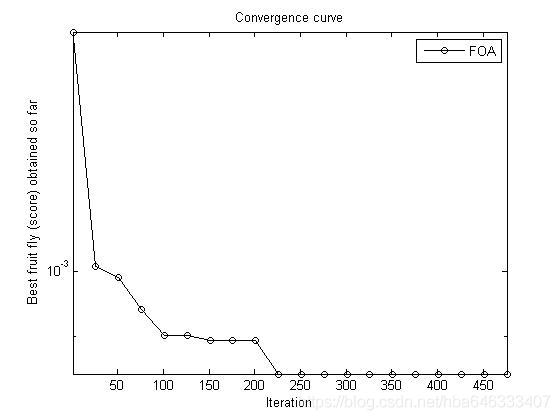
FOA求 X 2 X^2 X2最小值
上述代码仅能用于测试一个二维函数,失去了通用性。下面提供了一个不同的版本,可能更容易使用和改进,且可以扩展到不同维度。
% Fruit Fly Optimization Algorithm,FOA.
% The standard verison programmed by Prof.Pan is a simplifed version which
% is used to test a very easy function.In my opinion,in order to enhance
% the FOA application field,it is necessary to change it into a general
% version,which may be simple for students and scholars to use.
% Programmed and code by Stephen Zhao from Shanghai University of Engineering Science(China)
% Email:[email protected]
% If you have any questions concerning this program,please contact me.
% You might cite this article like this:Wen-Tsao Pan (2011)
% A new fruit fly optimization algorithm: Taking the financial distress
% model as an example, Knowledge-Based Systems, Vol.26, pp.69-74, 2012,
% DOI information: 10.1016/j.knosys.2011.07.001.
function [Smellbest,X,Y] = FOA(n,maxt,lb,ub,dim)
% Parameters setting
if nargin < 1
n = 20; % Population size
maxt = 5e2; % Max iterations
dim = 30; % Dimension of test function
lb = -100 * ones(1,dim); % Lower bound of test function
ub = 100 * ones(1,dim); % Upper bound of test function
end
% X = zeros(1 * dim);
% Y = zeros(1 * dim);
% new_X = zeros(1 * dim);
% new_Y = zeros(1 * dim);
% D = zeros(1 * dim);
% Sol = zeros(1 * dim);
% Fitness = zeros(n * 1);
% Initialize the original position
for i = 1:n
X(i,:) = lb+(ub-lb).*rand(1,dim); % the position of X axis
Y(i,:) = lb+(ub-lb).*rand(1,dim); % the position of Y axis
D(i,:) = (X(i,:).^2 + Y(i,:).^2).^0.5; % Caculate the distance
Sol(i,:) = 1./D(i,:); % the solution set
Fitness(i) = fun(Sol(i,:)); % Caculate the fitness
end
[bestSmell,index] = min(Fitness); % Get the min fitness and its index
new_X = X(index,:); % the X axis of min fitness
new_Y = Y(index,:); % the Y axis of min fitness
Smellbest = bestSmell;
best = Sol(index,:);
% Start main loop
for t = 1:maxt
for i = 1:n
% Refer to the process of initializing
X(i,:) = new_X + (ub - lb).*rand(1,dim);
Y(i,:) = new_Y + (ub - lb).*rand(1,dim);
D(i,:) = (X(i,:).^2 + Y(i,:).^2).^0.5;
Sol(i,:) = 1./D(i,:);
Fitness(i) = fun(Sol(i,:));
end
[bestSmell,index] = min(Fitness);
% If the new value is smaller than the best value,update the best value
if (bestSmell < Smellbest)
X(i,:) = X(index,:);
Y(i,:) = Y(index,:);
Smellbest = bestSmell;
end
% Out put result each 100 iterations
if round(t/100) == (t/100)
Smellbest;
end
cg_curve(t) = Smellbest;
end
% Output/display
disp(['Number of evaluations: ',num2str(maxt)]);
disp(['Best solution=',num2str(best),' fmin=',num2str(Smellbest)]);
% Draw the picture
semilogy((1:25:maxt),cg_curve(1:25:maxt),'k-o','markersize',5);
title('Convergence curve')
xlabel('Iteration');
ylabel('Best fruit fly (score) obtained so far');
hold on
axis tight
grid off
box on
legend('FOA')
% This is a classcial test function,namely Sphere function,which range is
% from -100 to 100.The dimension can be defined as you want.
function z = fun(u)
z = sum(u.^2);
结果如下:
智能推荐
WCE Windows hash抓取工具 教程_wce.exe -s aaa:win-9r7tfgsiqkf:0000000000000000000-程序员宅基地
文章浏览阅读6.9k次。WCE 下载地址:链接:https://share.weiyun.com/5MqXW47 密码:bdpqku工具界面_wce.exe -s aaa:win-9r7tfgsiqkf:00000000000000000000000000000000:a658974b892e
各种“网络地球仪”-程序员宅基地
文章浏览阅读4.5k次。Weather Globe(Mackiev)Google Earth(Google)Virtual Earth(Microsoft)World Wind(NASA)Skyline Globe(Skylinesoft)ArcGISExplorer(ESRI)国内LTEarth(灵图)、GeoGlobe(吉奥)、EV-Globe(国遥新天地) 软件名称: 3D Weather Globe(http:/_网络地球仪
程序员的办公桌上,都出现过哪些神奇的玩意儿 ~_程序员展示刀,产品经理展示枪-程序员宅基地
文章浏览阅读1.9w次,点赞113次,收藏57次。我要买这些东西,然后震惊整个办公室_程序员展示刀,产品经理展示枪
霍尔信号、编码器信号与电机转向-程序员宅基地
文章浏览阅读1.6w次,点赞7次,收藏63次。霍尔信号、编码器信号与电机转向从电机出轴方向看去,电机轴逆时针转动,霍尔信号的序列为编码器信号的序列为将霍尔信号按照H3 H2 H1的顺序组成三位二进制数,则霍尔信号翻译成状态为以120°放置霍尔为例如不给电机加电,使用示波器测量三个霍尔信号和电机三相反电动势,按照上面所说的方向用手转动电机得到下图① H1的上升沿对应电机q轴与H1位置电角度夹角为0°,..._霍尔信号
个人微信淘宝客返利机器人搭建教程_怎么自己制作返利机器人-程序员宅基地
文章浏览阅读7.1k次,点赞5次,收藏36次。个人微信淘宝客返利机器人搭建一篇教程全搞定天猫淘宝有优惠券和返利,仅天猫淘宝每年返利几十亿,你知道么?技巧分享:在天猫淘宝京东拼多多上挑选好产品后,按住标题文字后“复制链接”,把复制的淘口令或链接发给机器人,复制机器人返回优惠券口令或链接,再打开天猫或淘宝就能领取优惠券啦下面教你如何搭建一个类似阿可查券返利机器人搭建查券返利机器人前提条件1、注册微信公众号(订阅号、服务号皆可)2、开通阿里妈妈、京东联盟、拼多多联盟一、注册微信公众号https://mp.weixin.qq.com/cgi-b_怎么自己制作返利机器人
【团队技术知识分享 一】技术分享规范指南-程序员宅基地
文章浏览阅读2.1k次,点赞2次,收藏5次。技术分享时应秉持的基本原则:应有团队和个人、奉献者(统筹人)的概念,同时匹配团队激励、个人激励和最佳奉献者激励;团队应该打开工作内容边界,成员应该来自各内容方向;评分标准不应该过于模糊,否则没有意义,应由客观的基础分值以及分团队的主观综合结论得出。应有心愿单激励机制,促进大家共同聚焦到感兴趣的事情上;选题应有规范和框架,具体到某个小类,这样收获才有目标性,发布分享主题时大家才能快速判断是否是自己感兴趣的;流程和分享的模版应该有固定范式,避免随意的格式导致随意的内容,评分也应该部分参考于此;参会原则,应有_技术分享
随便推点
O2OA开源企业办公开发平台:使用Vue-CLI开发O2应用_vue2 oa-程序员宅基地
文章浏览阅读1k次。在模板中,我们使用了标签,将由o2-view组件负责渲染,给o2-view传入了两个参数:app="内容管理数据"和name="所有信息",我们将在o2-view组件中使用这两个参数,用于展现“内容管理数据”这个数据应用下的“所有信息”视图。在o2-view组件中,我们主要做的事是,在vue组件挂载后,将o2的视图组件,再挂载到o2-view组件的根Dom对象。当然,这里我们要在我们的O2服务器上创建好数据应用和视图,对应本例中,就是“内容管理数据”应用下的“所有信息”视图。..._vue2 oa
[Lua]table使用随笔-程序员宅基地
文章浏览阅读222次。table是lua中非常重要的一种类型,有必要对其多了解一些。
JAVA反射机制原理及应用和类加载详解-程序员宅基地
文章浏览阅读549次,点赞30次,收藏9次。我们前面学习都有一个概念,被private封装的资源只能类内部访问,外部是不行的,但这个规定被反射赤裸裸的打破了。反射就像一面镜子,它可以清楚看到类的完整结构信息,可以在运行时动态获取类的信息,创建对象以及调用对象的属性和方法。
Linux-LVM与磁盘配额-程序员宅基地
文章浏览阅读1.1k次,点赞35次,收藏12次。Logical Volume Manager,逻辑卷管理能够在保持现有数据不变的情况下动态调整磁盘容量,从而提高磁盘管理的灵活性/boot分区用于存放引导文件,不能基于LVM创建PV(物理卷):基于硬盘或分区设备创建而来,生成N多个PE,PE默认大小4M物理卷是LVM机制的基本存储设备,通常对应为一个普通分区或整个硬盘。创建物理卷时,会在分区或硬盘的头部创建一个保留区块,用于记录 LVM 的属性,并把存储空间分割成默认大小为 4MB 的基本单元(PE),从而构成物理卷。
车充产品UL2089安规测试项目介绍-程序员宅基地
文章浏览阅读379次,点赞7次,收藏10次。4、Dielecteic voltage-withstand test 介电耐压试验。1、Maximum output voltage test 输出电压试验。6、Resistance to crushing test 抗压碎试验。8、Push-back relief test 阻力缓解试验。7、Strain relief test 应变消除试验。2、Power input test 功率输入试验。3、Temperature test 高低温试验。5、Abnormal test 故障试验。
IMX6ULL系统移植篇-系统烧写原理说明_正点原子 imx6ull nand 烧录-程序员宅基地
文章浏览阅读535次。镜像烧写说明_正点原子 imx6ull nand 烧录