第 6 章 URDF、Gazebo与Rviz综合应用(自学二刷笔记)-程序员宅基地
技术标签: 机器人
重要参考:
课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ
讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
6.7.4 kinect信息仿真以及显示
通过 Gazebo 模拟kinect摄像头,并在 Rviz 中显示kinect摄像头数据。
实现流程:
kinect摄像头仿真基本流程:
-
已经创建完毕的机器人模型,编写一个单独的 xacro 文件,为机器人模型添加kinect摄像头配置;
-
将此文件集成进xacro文件;
-
启动 Gazebo,使用 Rviz 显示kinect摄像头信息。
1.Gazebo仿真Kinect
1.1 新建 Xacro 文件,配置 kinetic传感器信息
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<gazebo reference="kinect link名称">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>kinect link名称</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</robot>1.2 xacro 文件集成
将步骤1的 Xacro 文件集成进总的机器人模型文件,代码示例如下:
<!-- 组合小车底盘与传感器 -->
<robot name="my_car_camera" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_head.urdf.xacro" />
<xacro:include filename="my_base.urdf.xacro" />
<xacro:include filename="my_camera.urdf.xacro" />
<xacro:include filename="my_laser.urdf.xacro" />
<xacro:include filename="move.urdf.xacro" />
<!-- kinect仿真的 xacro 文件 -->
<xacro:include filename="my_sensors_kinect.urdf.xacro" />
</robot>1.3启动仿真环境
编写launch文件,启动gazebo,此处略...
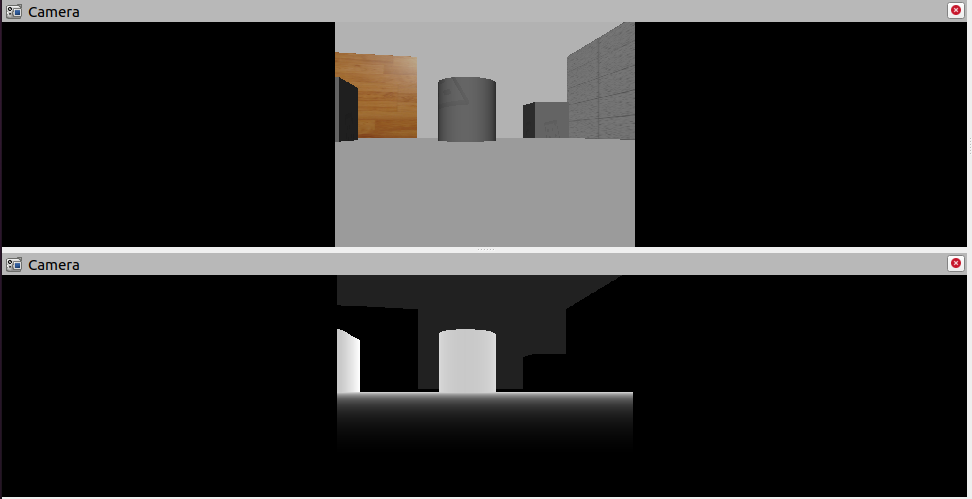
2 Rviz 显示 Kinect 数据
启动 rviz,添加摄像头组件查看数据

补充:kinect 点云数据显示
在kinect中也可以以点云的方式显示感知周围环境,在 rviz 中操作如下:
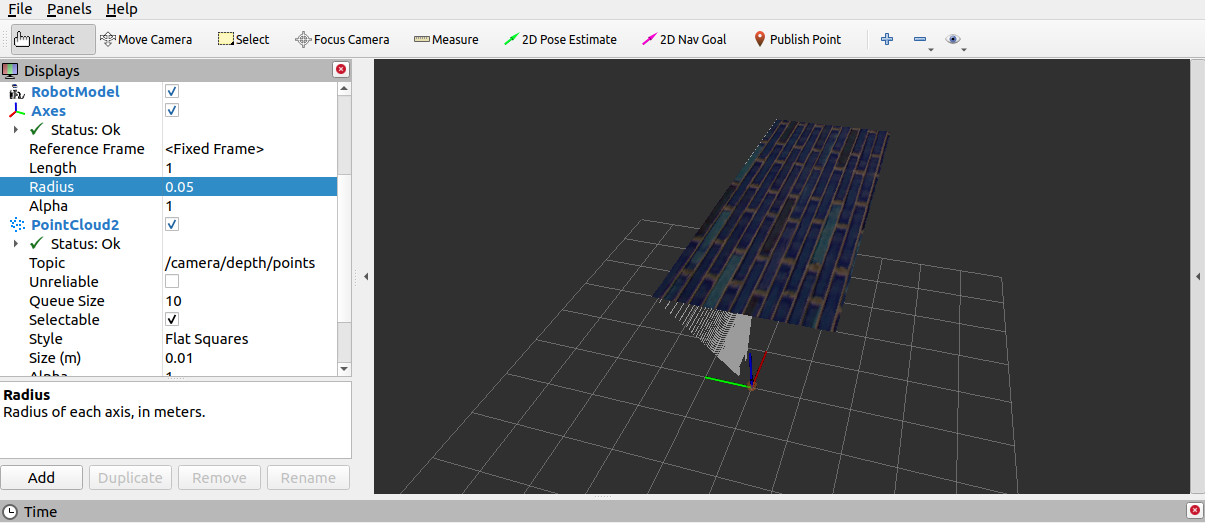
问题: 在rviz中显示时错位。
原因: 在kinect中图像数据与点云数据使用了两套坐标系统,且两套坐标系统位姿并不一致。
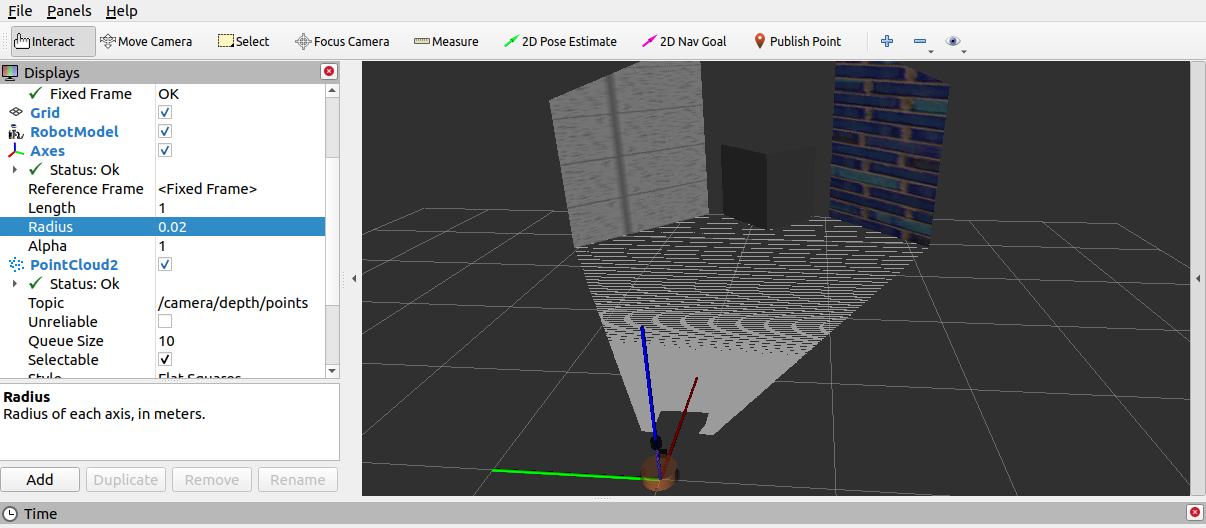
解决:
1.在插件中为kinect设置坐标系,修改配置文件的<frameName>标签内容:
<frameName>support_depth</frameName>2.发布新设置的坐标系到kinect连杆的坐标变换关系,在启动rviz的launch中,添加:
<node pkg="tf2_ros" type="static_transform_publisher" name="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />3.启动rviz,重新显示。
智能推荐
Java数字金额转化成汉字大写金额_java两位小数金额转大写-程序员宅基地
文章浏览阅读1.6k次。import java.math.BigDecimal;/** * Utils - 金额转为大写汉字 */public final class NumberToCNUtils { /**汉语中数字大写*/ private static final String[] CN_UPPER_NUMBER = { "零", "壹", "贰", "叁", "肆", "伍", "陆..._java两位小数金额转大写
CMM(软件能力成熟度模型)-程序员宅基地
文章浏览阅读1.4w次,点赞16次,收藏116次。CMM,即“软件能力成熟度模型”,是对组织软件过程的描述,核心内容是将软件开发视为一个过程,并且根据相应的原则对于软件开发进行相应的监控和研究。_cmm
vue2+vue-cli使用unocss_vue2 unocss-程序员宅基地
文章浏览阅读2.5k次。在根目录中添加 unocss.config.js 文件是为了提供更细粒度的配置选项给 @unocss/webpack 插件。通过这个配置文件,你可以定制化 UnoCSS 的行为,例如定义主题样式、配置插件、启用或禁用特定功能等。在 Vue CLI 项目中,默认情况下,你应该在根目录创建一个 unocss.config.js 文件来配置 UnoCSS。这个文件会被 @unocss/webpack 插件自动识别并加载。具体配置请查阅官网文档。_vue2 unocss
【C++】最通俗的多态、虚表、虚指针讲解_虚表指针-程序员宅基地
文章浏览阅读2.9k次,点赞26次,收藏82次。多态需要两个特性:(1)方法重写(override):父类与子类具有函数签名完全相同的方法。(2)向上类型转换(upcasting):用一个父类指针指向子类对象的时候,假如调用的是虚函数,会自动暂时将该指针转换为子类类型的指针。虚函数的存在就是为了类型转换,即使没有虚函数也能重写方法。虚函数并不是为了解决函数重写问题的。假如你去在父类和子类中都写上函数签名相同的方法,同样也能重写函数。例如 我们先写一个没有虚函数的例子结果为是完全没问题的!是的,即使不加virtual,也能实现方法重写!假如我用子类_虚表指针
【FFmpeg】ffmpeg命令详解(一)_ffmpeg -vf命令-程序员宅基地
文章浏览阅读5k次。1、命令格式ffmpeg [global_options] {[input_file_options] -i input_url} ... {[output_file_options] output_url} ...global_options:全局选项input_file_options:输入文件相关的选项output_file_options:输出文件相关的选项-i input_url:输入文件,可以有多个输入文件,每个输入文件前都要加“-i”选项output_url:输出文件2、简述_ffmpeg -vf命令
emWin 学习使用笔记 (3)_emwin demo-程序员宅基地
文章浏览阅读130次。原来想既然STemWin对此要求不高,随便找个版本就行,从VC6.0到VC2015,结果遇到莫名奇妙的许多问题(可能不是正版造成的吧),后来去微软官网下载了VC2022的专业版又有1个月的使用限制,唉!简单使用的方法,使我们对STemWin快捷的感受了一下它的尊容。实际它的内容还很丰富!要想达到能做点事的水平,需要踏踏实实的学习一番。StemWin提供了丰富的DEMO例程,重点就是学这个啦!该公司做了大量的编写及归纳整理工作,实际这里的基本就够啦。(1) 笔记本或一台电脑,我用的Win10。_emwin demo
随便推点
参与CSDN1024程序员节活动-程序员宅基地
文章浏览阅读4k次。有幸参与了CSDN主办的1024程序员活动-岳麓对话,聆听各位专家畅谈中国软硬件产业的根技术以及前沿科技的发展现状和未来。听程序员们聊技术,都比较实在落地,在谈到如果你有个孩子在读大学你会推荐他学什么专业和技术时,各位大佬都集体推荐本专业或本专业的基础学科,都充满了对自己行业的自豪感。小冰CEO李笛说:学习人工智能,未来如果技术被颠覆了,等于是自杀,而不学人工智能,则相当于是他杀。百度副总裁马杰说:我们应站在时代的肩膀上,人工智能在深刻地改变我们的世界,未来会持续产生影响。国科量子副总裁聂际敏说:学
BIM族库下载——10套知名地产Revit样板文件_地暖bim效果图-程序员宅基地
文章浏览阅读1.2k次。【资源介绍】资源名称:10套知名地产Revit样板文件资源分类: BIM族库、Revit族库其他简介:10套知名地产Revit样板文件【资源下载】链接:https://pan.baidu.com/s/1qsTHMbhGkiXztPQDmJlKfQ提取码:wb33【资源截图】【免责申明】本站提供的资源下载链接均来自互联网,仅供学习研究之用,不得用于商业,请在24小时内删除!资源版权归原作者及其公司所有,如果你喜欢,请购买正版。..._地暖bim效果图
西电软件体系结构——01绪论-程序员宅基地
文章浏览阅读288次。课程简介软件体系结构的主题是针对复杂软件系统的高层结构、组织单元之间的相互关系的描述,以及围绕这种描述开展的各项活动,如设计、评估、实现、管理等。课程目标_西电软件体系结构
Job for mysqld.service failed because the control process exited with error code-程序员宅基地
文章浏览阅读1k次。initialize specified but the data directory has files in it.”意思是初始化数据目录时发现目录里面有文件,可能原因是之前运行过命令目录中已生成文件。只要我们找到MySQL的数据目录并删除里面的文件即可解决。datadir是我们安装MySQL时默认指定的存放文件的数据目录,进入文件中删除里面的目录即可。网上搜了一下绿线标注部分语句,说是缺少libaio这个包,那就装一下。PS:如果我的方法没用的话可以试试网上说的修改文件权限的方法。_job for mysqld.service failed because the control process exited with error
老司机必备的手机浏览器,比UC浏览器还好用_比uc好用的手机浏览器-程序员宅基地
文章浏览阅读1w次。各位听得最多的段子:老司机们,上车了。没错,不管是在电脑端还是移动端,都需要一款好用的浏览器。那么,老司机们都用什么浏览器,什么样的浏览器才是老司机必备的浏览器呢?来咯,这些手机浏览器比UC浏览器还好用,功能可媲美桌面浏览器,一起来看看吧。_比uc好用的手机浏览器
7-35 jmu-Java&Python-统计文字中的单词数量并按出现次数排序-程序员宅基地
文章浏览阅读1.3k次。7-35 jmu-Java&Python-统计文字中的单词数量并按出现次数排序_jmu-java&python-统计文字中的单词数量并按出现次数排序