”点云“ 的搜索结果
点云
点云基础介绍(一)——三维点云
标签: 计算机视觉
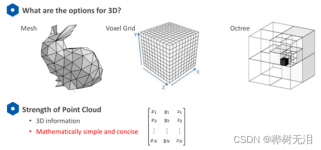
三维点云(3D Point Cloud)是一种用于表示三维空间中对象或场景的数据结构。在最基础的形式中,它是一个包含多个三维坐标点(X, Y, Z)的集合。这些点是通过对实际物体或场景表面进行离散采样而获得的,因此,点云...
基于Point Pair Features(PPF)的6D姿态估计方法PPF是在机器视觉领域应用广泛的一种物体位姿提取方法。大名鼎鼎的Halcon,其Surface Matching 模块就是在这种方法的基础上做的优化。
PCL(Point Cloud Library)是一个常用的点云处理库,提供了许多点云处理的功能,其中包括点云归一化。 点云归一化是将点云数据转换为统一的坐标系,使得不同点云之间可以进行有效的比较和配准。点云归一化的意义...
本资源提供一种基于c#、PCL、c++框架开发的点云多视图显示系统demo,该系统属于一个基础开发框架。资源中提供了功能展示和配置说明。 本资源提供全套的开发源码(c#、c++)和一套可直接运行的多视角点云显示系统。 ...
1.版本:matlab2014/2019a/2021a 2.附赠案例数据可直接运行matlab程序。 3.代码特点:参数化编程、参数可方便更改、代码编程思路清晰、注释明细。 4.适用对象:计算机,电子信息工程、数学等专业的大学生课程...
但是点云始终显示不出来,在dreamview的窗口里选择点云channel的下拉列表里也看不到自采集数据的点云topic名字,重启dreamview都不官用,只好去看dreamview的源码,在。dreamview主页面里选择点云的下拉列表里就可以...

点云统计滤波是一种基于统计学原理的点云数据滤波方法,可以有效地去除点云数据中的离群点和噪声。其基本思想是对点云中每一个点的邻域内的数据进行统计分析,然后根据一定的规则判断该点是否为离群点,从而实现点云...
1、该资源采用C++和PCL编写用于点云显示的DLL动态库,实现了点云显示与软件窗体的链接,属于开发点云软件中显示的必备功能。 2、本资源提供了C# 端、C++端dll开发的全部代码,可以在该框架上添加其他的软件功能...
点云合并:将两个不同点云为合并一个新的点云,这里的合并是指对点云中的数据进行合并或字段进行合并(用户可以自行选择合并的方式)。 需要注意的是:1.数据合并。如果是要合并两个不同点云的数据为一个点云时,要...
基于python注意力机制的三维点云车辆目标检测算法研究p源码+项目说明+示例图片.zip

点云综述(整理自网络资源)
标签: 数码相机
3D点云基础知识 - 知乎点云是某个坐标系下的点的数据集。根据激光测量原理得到的点云,包括三维坐标(XYZ)和激光反射强度(Intensity),强度信息与目标的表面材质、粗糙度、入射角方向以及仪器的发射能量、激光...
用OpenTK做的点云浏览程序,使用八叉树管理点云数据,采用视景体切割和显示列表加速,打开常用的LAS格式点云
基于LMS511激光雷达三维点云可视化python源码+点云数据+演示视频.zip 激光雷达旋转扫描与三维显示 内容包含: 主程序 窗口测试 点云数据 演示视频 使用说明:见使用说明 开发说明: 见点云三维建模 需要设备:LMS...
ExtractIndices滤波器:是一种在点云中提取指定索引的点的滤波器。它根据给定的索引列表从输入点云中提取相应的点,并将它们作为输出点云返回。
PCL学习一:点云与PCL基础

此代码用于将 LiDAR 点云投影到图像并生成带颜色的点云 输入 图像(.png 文件) 点云文件(.bin 文件) Calib 文件 支持两种 calib 文件类型。 所有参数存储在一个文件中。例如 KITTI R_rect: 形状 3*3 P_rect: ...
网上关于Halcon点云转成深度图的方法: get_image_size (GrayImage, Width, Height) gen_image_const (ImageConst, 'real', Width, Height) set_grayval (ImageConst, X, Y, Z) 首先要知道图像的宽度和高度,但是不...
如上代码分别创建"readers.las"、"filters.csf"、...本文介绍利用PDAL实现点云滤波方法,包含pipeline命令行运行、C++代码两种方法,C++代码分别介绍对点云文件进行滤波、点云全部在内存中进行滤波的pdal两种调用方法。
pdal2.7.1点云布料模拟滤波,C++调用源码。
【点云概述】什么是点云、来源、种类、特点、处理?点云(point cloud)是空间中点的数据集,可以表示三维形状或对象,通常由三维扫描仪获取。点云中每个点的位置都由一组笛卡尔坐标 ( X , Y , Z ) (X, Y, Z) (X,Y,Z...
他是一个c#插件,安装后,可以对界面进行渲染,当我们进行点云数据处理等大数据处理时候,可以安装他,可以在上面显示点云数据等功能。
unity点云绘制,点云数据绘制三维显示
基于lccp与边缘检测的三维点云分割方法C++源码+项目说明.zip
平面点云提取:是指从点云数据中提取出属于平面的点的过程。
推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地