”柔性matlab机械臂运动空间代码“ 的搜索结果
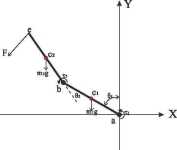
基于MATLAB的柔性机械臂动力学分析
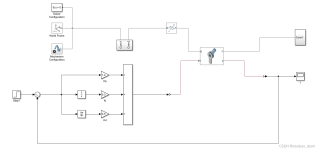
基于MATLAB的柔性机械臂控制教学演示平台
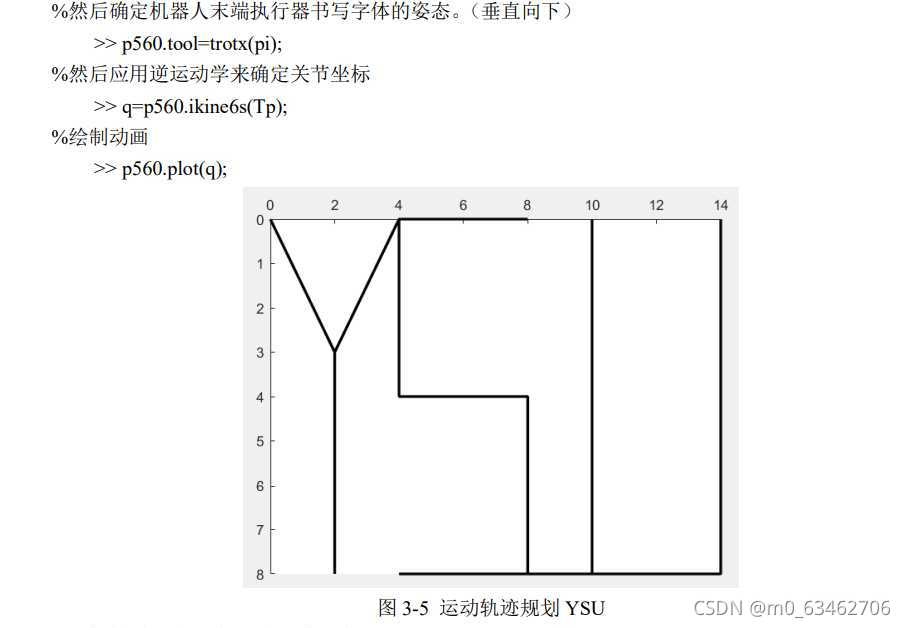
【代码】3-5-3机械臂轨迹规划matlab仿真。
三轴平面RRR机械臂拉格朗日动力学仿真



柔性机械臂的滑模轨迹跟踪控制及自适应振动抑制
gazebo在arm mac上似乎难以运行,退而选择Matlab,完成老师第一个作业,现学现卖,权当记录作业过程,有不足之处,多多指教。
而在机械臂的控制中,Matlab GUI提供了一个直观、易用的界面,使得用户能够方便地控制和监测机械臂的运动。这涉及到与机械臂的硬件接口和通信协议,具体要根据具体的机械臂型号和通信方式进行配置。在完成GUI的设计...
确定机械臂各关节变量的变化范围(θ_min,θ_max) ii.确定末端执行器的位姿矩阵T= 位置向量为[px,py,pz)]’。 iii.利用随机函数rand生成N个 0-1的随机点,以(θ_max-θ_min)∙rand为随机步长,得各关节变量的随机...
第八章 操作臂的机械设计【(一)8.1-8.9】(一)概述1、机器人系统的组成大体可分为四个部分(1)操作臂,包括它的内部或本体传感器;(2)末端执行器,或者叫做工具端;(3)外部传感器和执行器,比如视觉系统和...
机械臂建模分析:https://blog.csdn.net/Kalenee/article/details/81990130MoveIt规划下的关节空间运动分析:http://www.guyuehome.com/752一、简介在ROS平台下使用MoveIt进行机械臂控制时,默认调用...
机械臂柔性关节的自抗扰轨迹跟踪
标签: 首发论文
机械臂柔性关节的自抗扰轨迹跟踪,黄飞杰,贾庆轩,针对柔性关节高精度轨迹跟踪问题,在考虑关节柔性、非线性Lugre摩擦、电机及负载扰动的基础上,建立柔性关节动力学方程。将原柔性�
具有柔性关节的机械臂matlab仿真,主要是学习如何仿真机械臂的柔顺控制
最后,通过在Matlab以及ROS仿真环境下6自由度柔性机械臂的运动规划仿真实验对所提出的算法进行验证.实验结果表明,所提出算法可以快速提取场景的记忆信息,有效提高多场景环境下的运动规划效率,具有较强的适应性.
基于状态观测器的单连杆柔性机械臂自适应位置跟踪控制_毕业论文.pdf
移动机器人运动行为是由自主导航系统决定的,自主导航系统主要包含感知、规划、控制与定位四个模块,感知模块是连接机器人与环境的桥梁,其作用是“阅读、提取”环境内容;规划模块是连接感知与控制的桥梁,其作用是...
pid控制器设计代码matlab 差分机器人 原理图 重要-阅读WHY.md-电气原理图错误设计 脚步: 安装Raspberry Pi OS(32位)Lite。 对于正式的Raspberry Pi OS,如果需要手动登录,则默认用户名为pi,密码为raspberry。 ...
提出基函数叠加与粒子群优化(PSO) 相结合的振动抑制轨迹规划方法. 首先推导了各关节变量与模态坐标的... 最后以双杆刚柔混合机械臂为例开展仿真研究. 仿真结果表明, 所提出的方法大大减小了机械臂末端的残留振动.</p>


柔性加减速,柔性传动减速机,matlab源码.rar
下载地址:网盘下载内容简介本书是关于机器人学和机器视觉的实用参考书, ...第三部分“臂型机器人”(第7章至第9章)介绍其运动学、动力学和控制方面的知识;第四部分“计算机视觉”(第10章至第14章)包括光照与色彩,...
基于图像分析的视觉技术在(工业机械臂)机器人引导相关应用中的主要作用是精确获取对象物(待抓取物体)和目标物(待组装物体)的坐标位置和角度,并将图像坐标转换为(工业机械臂)机器人能识别的(工业机械臂)机器人...
针对未知扰动减弱柔性机械臂系统控制效果的 MATLAB 模型可以采用自适应控制的方法。具体来说,可以设计一个自适应控制器,通过不断地修正控制器的参数,以适应未知扰动的影响,从而减弱柔性机械臂系统控制效果受到的...
推荐文章
- c语言链表查找成绩不及格,【查找链表面试题】面试问题:C语言学生成绩… - 看准网...-程序员宅基地
- 计算机网络:20 网络应用需求_应用对网络需求-程序员宅基地
- BEVFusion论文解读-程序员宅基地
- multisim怎么设置晶体管rbe_山东大学 模电实验 实验一:单极放大器 - 图文 --程序员宅基地
- 华为OD机试真题-灰度图恢复-2023年OD统一考试(C卷)-程序员宅基地
- 【机器学习】(周志华--西瓜书) 真正例率(TPR)、假正例率(FPR)与查准率(P)、查全率(R)_真正例率和假正例率,查准率,查全率,概念,区别,联系-程序员宅基地
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地