
”柔性matlab机械臂运动空间代码“ 的搜索结果
S-R-S构型七自由度冗余机械臂运动学建模一:臂角参数化方法
基于MATLAB的柔性机械臂动力学分析.pdf

机械臂matlab运动规划代码运动控制 机器人直观运动控制的代码。 此存储库包含使用可穿戴运动控制界面所需的所有代码。 主要功能是运动控制手套代码和 IMU 传感器读取程序。 ###目录: HandMotionControlOpt:使用...
机械臂轨迹规划matlab代码
具有柔性关节的机械臂matlab仿真,主要是学习如何仿真机械臂的柔顺控制 具有柔性关节的机械臂matlab仿真,主要是学习如何仿真机械臂的柔顺控制
UR(Universal Robots)机械臂是一种轻量级、柔性的工业机器人,具有卓越的精度和重现性,被广泛应用于装配、搬运、焊接等工业领域,为生产线自动化注入了新的活力。因此,对UR机械臂进行动态建模
使用逆运动学求解机械臂各关节角度的Matlab代码

在这项工作中,我们采用了有限元方法建模的两个柔性臂(柔性机械手)的两种控制方式: 1-粘弹性处理,通过使用多层通用梁,这种方法使我们能够控制振动和减轻结构。 2- PD 控制器用于控制在操作空间中预先对圆轨迹...
基于MATLAB的柔性机械臂控制教学演示平台.pdf
具有柔性关节的机械臂matlab仿真,主要是学习如何仿真机械臂的柔顺控制

基于MATLAB的柔性机械臂动力学分析学兔兔第1期(总第194期) 机 械 工 程 与 自 动 化 NO.12016年 2月 MECHANICAI ENG1NEERING & AUT0MATI()N Feb.文章编号:1672—6413(2016)01—0033一O...
本文档描述了如何将一个真实的、相对便宜的hobclass机器人连接到机器人工具箱的MATLAB程序。
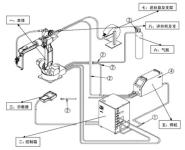
一.物料准备 1.1.工业机器人焊接工作站需要的设备:弧焊机器人本体 示教器和电柜,焊机,气瓶,变位机,清枪站... 焊接机械手焊接用保护气体一般为二氧化碳,氩气,和混合气(80%Ar+20%CO2)。 .送丝盘的形式根据...
1、上接从Onshape下载机械臂到MATLAB中和双摆运动演示。这里对导入的机械臂CAD模型(complete_arm.slx)进行运动的实现。方法如双摆运动演示一样:对关节部分施加驱动信号--- Actuation > Motion------...
在ADAMS虚拟样机和MATLAB上对水平面内的柔性手臂运动进行了仿真,人体手臂的运动仿真在虚拟样机进行.以人体手臂运动为参考,对比分析了变截面和等截面手臂的柔性变形,比较6种不同材质手臂运动中的末端横向变形量.仿真...
通过基于MATLAB串口通讯的机械臂控制程序,可以利用MATLAB GUI与arduino对机械臂进行控制,同时可以使机械臂自动操作,对物块颜色识别,并进行分类挑拣
柔性机械臂边界控制的自适应迭代学习算法
MATELAB机械臂学习笔记(一)MATELAB建立机械臂代码篇 MATELAB建立机械臂代码篇 下面展示一些 内联代码片。 // 建立机械臂关节 L1 = Link('d', 0, 'a', 0, 'alpha', -pi/2); L2 = Link('d', 0, 'a', 0, 'alpha',0); ...

柔性机械手的MATLAB代码在实现过程中,需要考虑以下几个方面: ...总之,柔性机械手的MATLAB代码需要综合考虑力学模型、控制策略、动力学仿真、路径规划和力控制等方面,以实现柔性机械手的精确控制和灵活运动。
机械臂模拟控制系统带GUI界面,可以显示三维动画,关节运动曲线,六自由度
基于机器人工具箱,采用D-H方法的二自由度双轴机械臂正运动和逆运动仿真,并且设计了gui用户界面
推荐文章
- yolov3系列(四)-keras-yolo3-实时眼睛鼻子嘴巴监测系统_眼睛 嘴巴 yolo-程序员宅基地
- C++类型支持之std::decltype-程序员宅基地
- GB/T28181国标视频监控平台TINYGBS支持4G执法记录仪接入大型可视指挥调度平台-程序员宅基地
- 毕设项目 基于wifi的室内定位算法设计与实现-程序员宅基地
- 【.Net】C# 根据绝对路径获取 带后缀文件名、后缀名、文件名、不带文件名的文件路径...-程序员宅基地
- c语言比用delay更好的延时,PIC单片机C语言程序设计(15)-程序员宅基地
- 微型计算机的细思维特征,详细版2014计算机基础期末考试大纲-程序员宅基地
- org.eclipse.wst.common.component_org/eclipse/wst/common/componentcore/resources/ivi-程序员宅基地
- 数据结构乐智教学百度云_数据结构 百度网盘分享-程序员宅基地
- Arcade 绘制全屏-程序员宅基地