标题MFNet: Towards Real-Time ...RGB-T图像的语义分割可以用于自动驾驶,用于克服夜晚光照差以及天气条件恶劣的情况。本文提出了第一个RGB-T的语义分割数据集(城市场景),同时提出了MFNet模型用于多模态(R...
”RGBT语义分割“ 的搜索结果

贝叶斯融合的多峰目标检测有关项目信息,请参阅我们的请观看 具有多模式输入的目标检测可以改善许多对安全至关重要的感知系统,例如自动驾驶汽车(AVs)。 受白天和黑夜运行的AV的启发,我们研究了使用RGB和热像仪的...
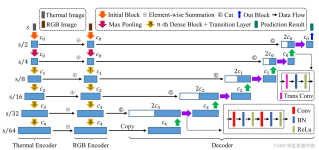
2019年的一篇RGB-T语义分割论文,创新点在于提出了一个新的编码器-译码器模型。实验结果表明,本文提出的RTFNet在MFNet提出的数据集中取得了目前最好的分割效果。 二、 Additional knowledge ...
RGBT跟踪的大规模高多样性基准 动机 RGBT跟踪引起了计算机视觉界的关注,但是该研究领域缺乏大规模和高多样性基准数据集,这对于深度RGBT跟踪器的训练和RGBT跟踪方法的综合评估都是必不可少的。 为此,我们提出了一...
点击下方卡片,关注...论文思路:多模态融合可以使语义分割更加鲁棒。然而,融合任意(arbitrary)数量的模态仍然有待探索。为了深入研究这个问题,本文创建了DELIVER 任意模态(arbitrary-modal)分割基准,包括深...


RGB-T语义分割可以应用于机器人自主环境感知领域(医学、农业、自动驾驶等等)。本文提出了第二个RGB-T数据集PST900以及一种新的RGB-T语义分割网络。实验表明,本文提出的模型在PST900中取得了目前最好的分割效果...
当前的研究目标转向多光谱(RGB-T)语义分割和行人检测任务,我将对近些年使用深度学习算法设计的模型进行详细分析。以下为截止到2020年初已公开发表的论文目录。这两个领域的相关论文很少,主要原因还是数据获取和...


**RGB-T行人检测汇总** 1.介绍 2015年,第一个RGB-T行人检测数据集KAIST被提出,多光谱行人检测任务逐渐成为计算机视觉领域的研究热点之一。可见光相机可以在光照条件良好的条件下清晰地捕捉到行人的细节信息和...
SiamFT:通过完全卷积孪生网络进行的RGB红外融合跟踪方法
AI视野·今日CS.CV 计算机视觉论文速览 Wed, 3 Jan 2024 Totally 70 papers 上期速览✈更多精彩请移步主页 Daily Computer Vision Papers Street Gaussians for Modeling Dynamic Urban Scenes Authors Yunzhi ...
CVPR论文列表,中英对照
7064RGB-T跟踪的交叉模态模式传播王超群,徐春燕,崔震,周玲,张彤,张晓雅,杨健,南京理工大学计算机科学与工程学院,高维信息智能感知与系统教育部重点实验室PCALab摘要RGBT 234上的匹配像素对比率百分之八十受...
近年来,随着人工智能(Artificial...通过摄像机或成像仪捕获现实世界的图片或视频帧 信息,计算机通过算法提取出高级语义信息,以此辅助人完成一些高级任务。下面介绍几种计算机视觉包括的基本任务,具体如图1.1所示。
人群计数(Crowd counting)从入门到深入。
单图像人群计数是对无约束场景的图像(即对场景没有任何限制的图像)中物体(人、汽车、细胞等)的数量进行估计。近年来,人群计数因其在公共安全、交通管理、消费者行为、细胞计数等方面的重要应用而受到广泛关注[131,...
人体方面 1.1 人体检测 ★ PETS数据集 链接:https://www.jiangdabai.com/download/pets%e6%95%b0%e6%8d%ae%e9%9b%86 ★ INRIA Person数据集 链接:...★ UCF Sport Action运动数据集 ...
8886∗可见热无人机跟踪:大规模基准和新基准张鹏宇1、赵杰1、王东1、胡川路1、2、阮翔31大连理工大学信息与通信工程学院2鹏程实验室3Tiwaki Co.Ltd.{pyzhang,zj982853200}@ mail.dlut.edu.cn,{wdice,lhchuan}@...
16102OMNIVORE:一个单一的模型,用于许多视觉模态Rohit Girdhar、Mannat Singh、Nikhila Ravi、Laurens van der Maaten Armand Joulin Ishan Misra、Meta AIhttps://facebookresearch.github.io/omnivore图像(RGB...
5252MT-DETR:基于置信度融合的鲁棒端到端多模式检测国立台湾大学[email protected]国立台湾大学[email protected]摘要由于自动驾驶的趋势需求,基于摄像头的目标检测最近吸引了大量的关注和成功的发展...
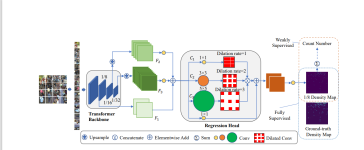
6315↑在基类上训练支持净查询密度图地面实况损失新课程支持净查询密度图数量:113基于相似性感知特征增强的少镜头目标计数游志远1,杨凯2,罗文涵3,卢欣2,崔磊4,乐欣怡11上海交通大学,2商汤科技,3中山大学,4...
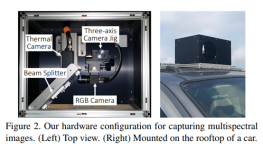
最后,提出了一种用于快速语义分割的框架。 模型: 1数据校正: 这个比赛提供的数据集是RGB-D-T数据集,通过Depth信息来校正RGB和T信息对齐,通过T图像得到T到RGB图像的映射关系进行校正,这里不仔细讲了,
推荐文章
- C++零碎知识点(一)-程序员宅基地
- 【Python学习笔记】Coursera课程《Python Data Structures》 密歇根大学 Charles Severance——Week5 Dictionary课堂笔记...-程序员宅基地
- v-html 解析字符串到 html 换行显示_html字符串 v-html-程序员宅基地
- 招收跨专业考计算机的学校,跨专业考研,接受跨专业考研的学校。-程序员宅基地
- 数学模型预测模型_改进著名的nfl预测模型-程序员宅基地
- ELK-FileBeat入门_filebeat 6.5.4 - windows-程序员宅基地
- 微信小程序架构图与开发_微信小程序框架图-程序员宅基地
- Node.js 下载与安装教程_node下载-程序员宅基地
- MySQL报错:The server time zone value '�й���ʱ��' is unrecognized or represents more than one time zone_连接失败! the server time zone value ' й ' is-程序员宅基地
- 数学与生活——读书笔记-程序员宅基地