论文解读--Visual Lane Tracking and Prediction for Autonomous Vehicles-程序员宅基地
技术标签: 算法 自动驾驶 论文解读 目标检测 人工智能 目标跟踪
自动驾驶汽车视觉车道线跟踪和预测
摘要
我们提出了一种用于自动驾驶汽车跟踪水平道路车道标记位置的可视化方法。我们的方法是基于预测滤波的。预测步骤估计在每个新的图像帧中期望的车道标记位置。它也是基于汽车的运动学模型和嵌入式测程传感器产生的信息。使用适当准备的测试车辆获得的实验结果表明,在某些条件下,如振荡和变道,预测步骤可以显著地减少跟踪误差。因此,我们相信我们的方法应用于基于图像的控制自动驾驶汽车可以提高系统性能。
1.介绍
汽车本身无疑是现代自动化的最大挑战之一。一方面,飞机和船舶的汽车驾驶员是众所周知的和广泛使用的。另一方面,由于更加复杂,对于汽车和卡车,这项技术仍在开发中。其目标是使汽车自动从地址A驾驶到地址B,与有经验的人类司机一样安全(或更安全)。在这种情况下,用户就只是一名乘客。
对于汽车来说,自动驾驶系统的一个基本要求是能够将车辆保持在道路内,并行驶在车道的中心。这需要了解周围环境的知识,这是通过安装在汽车上的传感器获得的,例如,照相机、激光扫描、GPS和惯性单元。
(NASHMAN,1992年)、(SCHNEIDERMAN,1994年)、(POMERLEAU,1996年)、(BROGGI,1999年)和(LU,2002年)等项目只依赖于摄像机生成的灰度图像,用于检测道路的位置和估计曲率。在(CHRISMAN,1998)和(SALES,2010)中,彩色图像被用来对属于道路的区域进行分类。这一想法也被应用于(DAHLKAMP,2006),以扩大系统的范围,超出在其自主车辆上使用的激光测距仪(LRF)传感器的范围。
立体视觉系统允许计算场景上物体的距离。在(BROGGI,2010)和(LIMA,2010)中使用了双目视觉系统(立体视觉)用于障碍检测。但是,这种系统具有计算成本高的缺点。
像(GUIZZO,2011)和(自动驾驶实验室,2012)等项目将LRF传感器与相机、GPS、IMU和地图信息相结合,使自动驾驶研究达到前所未有的水平。这两个项目都成功地完成了在真实城市环境中的自主导航任务。
在巴西,这一领域的研究正在开始发展,我们强调一些:为你驾驶,UNIFEI(VEERMAS,2010),CADU,UFMG(LIMA,2010),VERO,CTI /Campinas(VERO,2012),EESC / USP(SENA,2012),CARINA(CARINA,2010),由ICMC / USP开发。我们大学的另一个小组(UFES)也在开发一个自动驾驶汽车项目。他们买了一辆已经安装了主要硬件组件的车,他们主要关注的是软件方面。他们的主要目标是了解人类大脑是如何利用图像来解释世界的(LCAD,2013)。另一方面,我们项目的主要目标是建立一辆具有简单和低计算成本的解决方案的自动驾驶汽车。为了实现这一目标,我们正在通过安装执行器和传感器来调整普通汽车。我们的汽车已经能够在可控的条件下,在真实的道路上自动驾驶(VIVACQUA等人,2012年)。
我们的系统由一台连接到一个USB摄像头的笔记本电脑和一个接口板组成。USB摄像头安装在前挡风玻璃上,指向道路。接口板将计算机连接到汽车编码器,并连接到负责驱动轮定位的步进电机。
计算视觉系统产生的视觉信息受到由遮挡、反射、阴影等引起的噪声或误差的影响。为了使这些问题的影响最小化,对原始图像进行过滤过程,以产生更可靠的信息。这些信息是所谓的模型状态的基础,并被反馈到视觉算法中,以定义感兴趣的图像区域(ROI)(见图1)。在(VIVACQUA 等人,2012)中,这些信息也被控制器用来使自动驾驶汽车保持在道路的中心。

图1:用来生成模型状态的可视化信息流
一些视觉车道跟踪的方法(SCHNEIDERMAN,1994)、(AUFRERE,2000)、(LU,2002)和(CHOI,2012)。它们都使用某种过滤过程来更新其模型状态(描述车道标记的参数),但没有一种方法使用预测。为了实现预测,车辆的位移信息必须是可访问的和可靠的。我们已经对我们的自动驾驶汽车进行了必要的调整,在本文中,我们提出了一种基于预测过滤的可视化方法来跟踪水平道路车道标记的位置的可视化方法。预测步骤估计在每一个新的图像帧中的期望车道标记位置,以最小化跟踪误差。下面的几部分将对我们的系统进行解释,并讨论一些实验结果。
2.参照系
在进行预测步骤之前,需要将系统参照系从相机的参照系更改为汽车的参照系,考虑到摄像机在原点(自我参照系-OR)。在自动驾驶汽车中使用的视觉系统检测到的水平车道标记(VIVACQUA,2012)通过反向透视投影(图2)进行映射,就像图像是从天空看到的一样,假设道路是完美的平面(鸟瞰图)。

图2:参照系。(A)相机参照系;(B)汽车参照系
在自我参照系中,原点是地平面中相机正下方的点,Z轴对应于汽车的位移方向(当向前移动时),X轴是横向方向。图2 (B)显示了与图2 (A)图像中检测到的信息对应的两条导线(左和右)。预测步骤的基本思想是,可以根据运动学模型预测汽车在下一个图像帧中的位置,和在实际帧上的位置。
3.汽车运动学模型
汽车运动学模型可以用图3所示的自行车模型来近似。图中:Pr为描述车辆轨迹的圆周的中心,Pc为车辆中的摄像机位置(或原点),R为Pc描述的轨迹曲率半径,Lt为车辆前后轴的距离,Lr为或原点与后轴的距离,α为前轮转角。

图3:汽车运动学模型
使用汽车运动学模型(1),根据其参数和前轮转角(α),我们可以计算出世界参照系(WR)中的车辆轨迹。
 (1)
(1)
其中,x、z、θ为车辆在WR中的位置和方向,v为车辆的线速度。值得注意的是,世界参照系WR的起源是固定在地面上的,而不是固定在汽车上的。因此,当汽车移动时,点Pc描述了点线轨迹,固定物体在世界中的位置保持不变。
4.位置预测
在OR参考系中,点Pc与原点重合,世界上的固定物体旋转Pr,但方向相反。图4显示了在或参考系统中所看到的世界上一个固定物体的初始位置。根据初始位置的信息和由运动学模型所定义的轨迹,可以估计未来的位置。

图4:对象位置预测:(a)右转;(b)左转;(c)直行。
旋转中心(Pr)、摄像机轨迹的曲率半径(R)和角位移(Δθ)采用(2)、(3)和(4)进行计算。
以米为单位的距离(通过位于前轴的编码器获得)和前轮转角(α)(通过安装在驱动轮轴上的另一个编码器获得):
![]() (2)
(2)
![]() (3)
(3)
![]() (4)
(4)
其中,ΔL为位移距离。
5.抛物线旋转
要估计任何物体的新位置,人们只需知道旋转中心(Pr)、旋转角度(Δθ),并应用一个二维旋转操作。在(VIVACQUA,2012)中描述的自动驾驶车辆的具体案例中,系统被测试,跟踪对象是构成道路模型的两个道路车道标记。每一个标记都用一个二次多项式表示。
![]() (5)
(5)
给定旋转抛物线的一个点(X,Z),我们可以通过反向旋转操作,在原始抛物线中找到相应的点(X,Z),由下式给出
![]() (6)
(6)
![]() (7)
(7)
其中Px和Pz为旋转中心的坐标。在(5)中替换(6)和(7),我们得到了旋转抛物线的一般形式:
![]() (8)
(8)
这种形式与软件中使用的原始数据结构不兼容,不允许对X给定Z的显式计算,这在计算上是不可取的。为了解决这个问题,我们提出了一种方法来找到一个良好的旋转抛物线的近似值,以保持在(5)中给出的默认形式。
考虑旋转的抛物线方程
![]() (9)
(9)
我们需要解决的问题是找到系数a2r,a1r和a0r。解决这个问题的一般思想是:找到区间内原始抛物线x (z)的中心点M[z0..z1];应用Δθ绕Pr点旋转(从而使M变成Mr);考虑Mr属于新的抛物线xr (z);并考虑这个点的切线方向被旋转角度Δθ减去。
切线在M点上的倾角由![]() 给出。利用切线差的性质,我们有:
给出。利用切线差的性质,我们有:
![]() 。由于旋转的抛物线曲率没有改变,我们有a2r=a2。系数a1r可以用
。由于旋转的抛物线曲率没有改变,我们有a2r=a2。系数a1r可以用![]() 计算,系数a0r用
计算,系数a0r用![]() 计算。通过这样做,我们得到在OR参考系的旋转抛物线参数。
计算。通过这样做,我们得到在OR参考系的旋转抛物线参数。
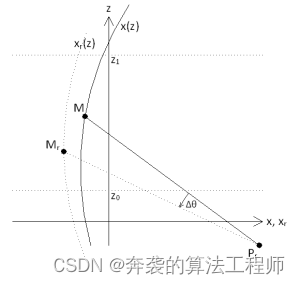
图5:旋转抛物线的近似值
6.滤波
我们考虑到车道标记位置在连续帧中不会有太大的变化,大量的噪声会导致图像快速变化(如反射或遮挡)。为此,我们选择使用一阶低通滤波器,考虑到其对系统行为的影响,我们在实验中定义了该时间常数:如果该值过低,滤波对零星误差测量的衰减作用很小。另一方面,如果它太高,这将延迟响应,并且会给模型带来困难,例如在弯道前后发生的道路形状的缓慢变化。在用车载摄像机在80km/h速度下拍摄的视频进行测试后,我们发现τ = 3的值在鲁棒性和响应速度之间产生了很好的折衷。
式(10)表示表示状态模型的向量Wi。式(11)是低通滤波器的表达式,它从视觉系统(Ui)生成的度量中更新模型状态。
![]() (10)
(10)
![]() (11)
(11)
7.实验结果
为了测量预测系统的性能,我们使用一个适当适应的测试车辆进行了一些实验,以获取与里程长测量同步的道路图像。该车辆在三种曲率条件下驾驶,如图6: (A)在左转;(B)在一条直线上;和(C)在右转。在每个曲率条件下,车辆就轨迹的振荡水平以三种不同模式进行(图6 (D)至6 (F)):无振荡(L0),车辆沿与导线平行的道路行驶;低振荡水平(L1),车辆周期性穿过中心线;高振荡(L2),车辆也穿过中心线,但有更明显的偏差。


图6:实验条件:(A)左转、(B)直行、(C)右转、(D、E、F)对应路线
在轨迹中引入振荡,迫使车辆移动不平行于道路线,以便预测能够证明其保持模型状态接近瞬时测量的能力。
测试在100米长的路径上以大约40 km/h的速度进行,每40 ms采集一次数据(图像和里程计)。图7显示了图6中每个轨迹的注册驱动轮位置。

图7:在试验中获得的驱动轮位置数据
收集到的数据在实验室进行分析,用来评估系统性能(有和不使用预测)。所使用的性能指数是绝对水平平均误差(AHAE),由模型定义的曲线与瞬时测量定义的曲线的差值计算出来。
![]() (12)
(12)
8.讨论
图8显示了从测试中获得的视频中获得的帧序列,它与图6(D)中所示的L2轨迹的情况相对应。这个序列对应于车辆远离中心线的延伸,可以从黄色标记的连续位移到左边。

图8:帧序列,显示了有和没有预测的跟踪过程。
图8清楚地显示,与只使用滤波和预测的模型(黑色虚线)相比,使用滤波和预测的模型(白色虚线)更接近度量值(红色连续线)。这说明了我们的方法的好处。
感知模型状态和视觉测量之间更接近的另一种方法是通过图9中的图,图中显示了过滤模型和带有预测的过滤模型的多项式的参数a0(车道偏移)和a1(车道方向)。曲率参数(a2)没有给出,因为它在考虑的拉伸中实际上是恒定的。

图9:仅滤波和滤波-预测的模型参数表现

图10:振荡等级2中的累积误差
在图9中,我们可以注意到低通滤波去除高频噪声的能力,这导致了延迟平滑曲线(没有预测情况)。通过使用预测,可以减少不期望的延迟(预测)。这种减少是因为预测补偿了汽车运动对捕获图像的影响。图10为具有较高振荡(L2)的测试条件下,指数AHAE的归一化累积误差(NAE),其中认为无预测的累积误差为1。用(13)计算,其中n为实验中使用的总帧数。
![]() (13)
(13)
在所有测试用例中,有预测的累积误差上升速率小于未有预测的累积误差(低于0,51)。
图11总结为在所有测试条件下得到的最终NAE值,详见图11。我们可以注意到,当汽车以较高振荡水平的轨迹行驶时,NAE的值会降低。这是因为当存在振荡时,车道标记在摄像机视野内横向发生位移,预测的使用补偿了这种效应,使模型更接近真实测量,同时保持滤波过程给出的鲁棒性。我们相信,预测步骤将提高自动驾驶车辆在类似条件下驾驶时的性能。
智能推荐
vue引入原生高德地图_前端引入原生地图-程序员宅基地
文章浏览阅读556次,点赞2次,收藏3次。由于工作上的需要,今天捣鼓了半天高德地图。如果定制化开发需求不太高的话,可以用vue-amap,这个我就不多说了,详细就看官网 https://elemefe.github.io/vue-amap/#/zh-cn/introduction/install然而我们公司需要英文版的高德,我看vue-amap中好像没有这方面的配置,而且还有一些其他的定制化开发需求,然后就只用原生的高德。其实原生的引入也不复杂,但是有几个坑要填一下。1. index.html注意,引入的高德js一定要放在头部而_前端引入原生地图
ViewGroup重写大法 (一)-程序员宅基地
文章浏览阅读104次。本文介绍ViewGroup重写,我们所熟知的LinearLayout,RelativeLayout,FrameLayout等等,所有的容器类都是ViewGroup的子类,ViewGroup又继承View。我们在熟练应用这些现成的系统布局的时候可能有时候就不能满足我们自己的需求了,这是我们就要自己重写一个容器来实现效果。ViewGroup重写可以达到各种效果,下面写一个简单的重写一个Vi..._viewgroup 重写
Stm32学习笔记,3万字超详细_stm32笔记-程序员宅基地
文章浏览阅读1.8w次,点赞279次,收藏1.5k次。本文章主要记录本人在学习stm32过程中的笔记,也插入了不少的例程代码,方便到时候CV。绝大多数内容为本人手写,小部分来自stm32官方的中文参考手册以及网上其他文章;代码部分大多来自江科大和正点原子的例程,注释是我自己添加;配图来自江科大/正点原子/中文参考手册。笔记内容都是平时自己一点点添加,不知不觉都已经这么长了。其实每一个标题其实都可以发一篇,但是这样搞太琐碎了,所以还是就这样吧。_stm32笔记
CTS(13)---CTS 测试之Media相关测试failed 小结(一)_mediacodec框架 cts-程序员宅基地
文章浏览阅读1.8k次。Android o CTS 测试之Media相关测试failed 小结(一)CTSCTS 即兼容性测试套件,CTS 在桌面设备上运行,并直接在连接的设备或模拟器上执行测试用例。CTS 是一套单元测试,旨在集成到工程师构建设备的日常工作流程(例如通过连续构建系统)中。其目的是尽早发现不兼容性,并确保软件在整个开发过程中保持兼容性。CTS 是一个自动化测试工具,其中包括两个主要软件组件:CTS tra..._mediacodec框架 cts
chosen.js插件使用,回显,动态添加选项-程序员宅基地
文章浏览阅读4.5k次。官网:https://harvesthq.github.io/chosen/实例化$(".chosen-select").chosen({disable_search_threshold: 10});赋值var optValue = $(".chosen-select").val();回显1.设置回显的值$(".chosen-select").val(“opt1”);2.触发cho..._chosen.js
C++ uint8_t数据串如何按位写入_unit8_t 集合 赋值 c++-程序员宅基地
文章浏览阅读1.9k次。撸码不易,网上找不到,索性自己写,且撸且珍惜!void bitsWrite(uint8_t* buff, int pos, int size, uint32_t value){ uint32_t index[] = { 0x80000000, 0x40000000, 0x20000000, 0x10000000, 0x8000000, 0x4000000, 0x2000000, 0x1000000, 0x800000, 0x400000, 0_unit8_t 集合 赋值 c++
随便推点
Javaweb框架 思维导图_javaweb框架图-程序员宅基地
文章浏览阅读748次。javaweb知识点_javaweb框架图
adb的升级与版本更新_adb iptabls怎么升级-程序员宅基地
文章浏览阅读1.1w次,点赞3次,收藏16次。adb是没有自动升级的命令的,如果想要更新adb的版本,我们可以在网上找到自己想要的版本进行更新给大家提供几个版本https://pan.baidu.com/s/1yd0dsmWn5CK08MlyuubR7g&shfl=shareset 提取码: 94z81、下载解压后我们可以找到下面几个文件,并复制2、找到adb安装的文件夹下的platform-tools文件夹,我这里是..._adb iptabls怎么升级
微信苹果版删除所有的聊天记录的图文教程_mac微信怎么删除聊天列表-程序员宅基地
文章浏览阅读3.8k次。很多用户可能都知道怎么在Windows系统上删除微信的聊天记录,那么苹果电脑上的微信软件怎么删除所有的聊天记录呢?下面小编就专门来给大家讲下微信mac版删除所有的聊天记录的图文教程。点击后会弹出提示窗口,点击这里的确认按钮就可以将其清理掉了。在这里选择要清理的数据,然后点击下方右边的清理按钮就行了。在mac上打开微信后,点击左下角的横线图标。然后再点击这里的管理微信聊天数据按钮。打开了设置窗口,点击上方的“通用”。在这里点击下方的前往清理按钮。点击弹出菜单里的“设置”。_mac微信怎么删除聊天列表
【报错笔记】数据类型转换时报错:Request processing failed;nested exception is java.lang.NumberFormatException:..._request processing failed; nested exception is jav-程序员宅基地
文章浏览阅读7.7k次。数据类型转换时报错:Request processing failed;nested exception is java.lang.NumberFormatException:For input String “20151512345”报错原因:数字格式异常,接着后面有 For input string: “201515612343” 提示,这就告诉我们你当前想把 “201515612343” 转换成数字类型时出错了。解决方案:使用2015151612343这个数字太大了,所以直接使用string_request processing failed; nested exception is java.lang.numberformatexcepti
qml 自定义消息框_Qt qml 自定义消息提示框-程序员宅基地
文章浏览阅读387次。版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。本文链接:https://blog.csdn.net/a844651990/article/details/78376767Qt qml 自定义消息提示框QtQuick有提供比较传统的信息提示框MessageDialog,但是实际开发过程并不太能满足我们的需求。下面是根据controls2模块中..._qml 自定义 messagedialog
Redis.conf 默认出厂内容_默认出厂的原始redis.conf文件全部内容-程序员宅基地
文章浏览阅读599次。# Redis configuration file example.## Note that in order to read the configuration file, Redis must be# started with the file path as first argument:## ./redis-server /path/to/redis.conf # Note on units: when memory size is needed, it is pos._默认出厂的原始redis.conf文件全部内容