线性判别分析LDA((公式推导+举例应用))_lda推导-程序员宅基地
技术标签: 机器学习
引言
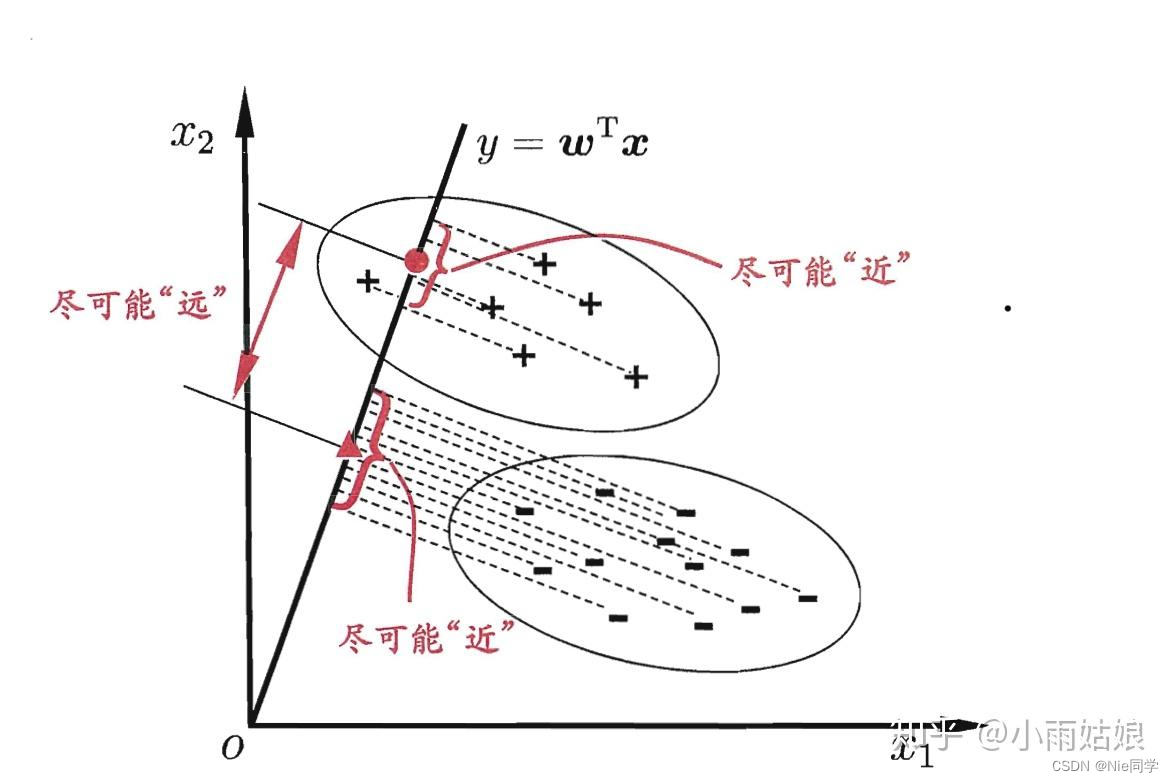
线性判别分析(Linear Discriminant Analysis,简称LDA)是一种经典的监督学习算法,其主要目标是通过在降维的同时最大化类别之间的差异,为分类问题提供有效的数据表征。LDA不同于一些无监督降维方法,如主成分分析(PCA),它充分利用了类别信息,通过寻找最佳投影方向,使得不同类别的样本在降维后的空间中有最大的类间距离,同时保持同一类别内的样本尽量接近。
LDA的基本思想是通过最大化类别间的散布矩阵与类别内的散布矩阵的比值,来实现对数据的降维。在这个过程中,LDA通过解决广义特征值问题,找到了最优的投影方向,从而能够将原始高维数据映射到一个维度更低的空间中,同时保留了最重要的类别间信息。
模型表达式
我们先定义两个变量
- 类别内散布矩阵:反应同一个类别内数据的离散程度。
S w = ∑ x ∈ X 0 ( x − μ 0 ) ( x − μ 0 ) T + ∑ x ∈ X 1 ( x − μ 1 ) ( x − μ 1 ) T S_w=\sum_{x\in X_0}(x-\mu_0)(x-\mu_0)^T+\sum_{x\in X_1}(x-\mu_1)(x-\mu_1)^T Sw=x∈X0∑(x−μ0)(x−μ0)T+x∈X1∑(x−μ1)(x−μ1)T - 类别间散布矩阵:反应不同类别间数据的离散程度。
S b = ( μ 0 − μ 1 ) ( μ 0 − μ 1 ) T S_b=(\mu_0-\mu_1)(\mu_0-\mu_1)^T Sb=(μ0−μ1)(μ0−μ1)T
其中, X i X_i Xi、 μ i \mu_i μi分别表示第 i ∈ { 0 , 1 } i\in \{0,1\} i∈{ 0,1}类示例的集合和均值向量。
我们的目标欲使同类样例的投影点尽可能的相近,即 S w S_w Sw尽可能的小。而欲使异类的样例投影点尽可能远离,即 S b S_b Sb尽可能大。同时考虑二者,则可得到欲最大化的目标:
J = w T S b w w T S w w J=\frac{w^TS_bw}{w^TS_ww} J=wTSwwwTSbw
拉格朗日乘子法
我们可以发现 J J J的解与 w w w长度无关,只与 w w w的方向有关。不失一般性,令 w T S w w = 1 w^TS_ww=1 wTSww=1,则可等价于算以下式子:
m i n w − w T S b w s . t . w T S w w = 1 \begin{align*} min_w\ -w^TS_bw \\ s.t. \quad w^TS_ww=1 \end{align*} minw −wTSbws.t.wTSww=1
由拉格朗日乘子法,上式等价于:
S b w = λ S w w S_bw=\lambda S_ww Sbw=λSww
其中 λ \lambda λ是拉格朗日乘子法。
{ S b w = λ S w w S b w = ( μ 0 − μ 1 ) ( μ 0 − μ 1 ) T w \begin{cases} S_bw=\lambda S_ww\\ S_bw=(\mu_0-\mu_1)(\mu_0-\mu_1)^Tw \end{cases} {
Sbw=λSwwSbw=(μ0−μ1)(μ0−μ1)Tw
又因为 ( μ 0 − μ 1 ) T w (\mu_0-\mu_1)^Tw (μ0−μ1)Tw是标量,又因为只与方向有关,可令 ( μ 0 − μ 1 ) T w = C (\mu_0-\mu_1)^Tw=C (μ0−μ1)Tw=C,联立可解得
λ C S w w = ( μ 0 − μ 1 ) \frac{\lambda}{C}S_ww=(\mu_0-\mu_1) CλSww=(μ0−μ1)
只与大小有关,令 λ C = 1 \frac{\lambda}{C}=1 Cλ=1,有
w = S w − 1 ( μ 0 − μ 1 ) w=S_w^{-1}(\mu_0-\mu_1) w=Sw−1(μ0−μ1)
阈值分类器
最终将投影到直线的数据 w T x i w^Tx_i wTxi送入阈值分类器中,而阈值分类器是一类简单的二元分类器,它通过设定一个阈值来决定样本属于哪个类别。
有以下几种阈值分类器:
- 固定阈值分类器:简单的阈值分类器,将某个特征的值与预先设定的阈值进行比较。例如,如果某个特征的值大于阈值,则分类为一类,否则为另一类。
- 百分位阈值分类器:基于数据的百分位进行分类,例如选择数据中的第75百分位作为阈值。这对于处理偏斜分布的数据可能更合适。
- 基于经验法则的分类器:有时候,根据领域专业知识或经验,可以设定一些规则来确定阈值。例如,根据某个特定的业务规则来分类。
- ROC曲线选择阈值:通过绘制接收者操作特征(ROC)曲线,可以选择最适合任务的阈值。ROC曲线以真正例率和假正例率为横纵坐标,通过改变阈值,可以得到不同的点,选择最适合的操作点作为阈值。
- 最大化特定性或敏感性:有时根据任务需求,可以选择使得分类器具有最大特定性或最大敏感性的阈值。
- 基于平均值的分类器:基于平均值的阈值分类器是一种简单的二元分类方法,其原理是将数据集中某个特征的值与该特征的平均值进行比较,然后根据比较结果将数据分为两个类别。
结论
通过深入分析线性判别分析(Linear Discriminant Analysis,简称LDA)的基本思想和模型表达式,以及阈值分类器的选择方式,我们得出以下结论:
LDA的核心思想是在降维的同时最大化类别之间的差异,通过寻找最佳投影方向,使得不同类别的样本在降维后的空间中有最大的类间距离,同时保持同一类别内的样本尽量接近。该方法不同于一些无监督降维方法,如主成分分析(PCA),因为它充分利用了类别信息。
模型表达式中,我们定义了类别内散布矩阵 S w S_w Sw和类别间散布矩阵 S b S_b Sb,并通过最大化二者比值来找到最优的投影方向。使用拉格朗日乘子法,我们导出了投影方向 w w w的表达式,即 w = S w − 1 ( μ 0 − μ 1 ) w=S_w^{-1}(\mu_0-\mu_1) w=Sw−1(μ0−μ1)。
在阈值分类器的选择方面,我们介绍了几种不同的方法,包括固定阈值分类器、百分位阈值分类器、基于经验法则的分类器、ROC曲线选择阈值、最大化特定性或敏感性的分类器以及基于平均值的分类器。这些分类器可根据具体任务需求和数据特点进行选择。
在实际应用中,我们需要根据任务需求和数据特点选择合适的阈值分类器,并通过绘制ROC曲线等方式来评估模型性能。不同的任务可能需要权衡分类器的特定性和敏感性,或者根据领域专业知识设定阈值,以达到更好的分类效果。
综上所述,LDA作为一种经典的监督学习算法,通过降维和分类任务中的优异性能,在实际应用中具有广泛的应用前景。合理选择阈值分类器,结合领域专业知识,能够更好地发挥LDA在数据表征和分类方面的优势。
实验分析
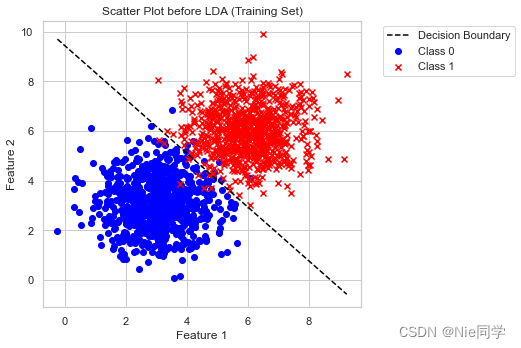
以下是特征1、特征2对应类别的数据集。
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
sns.set(context="notebook", style="whitegrid", palette="deep")
# 读入数据集
data = pd.read_csv('data/lda_dataset.csv')
# 提取特征和标签
X = data[['Feature_1', 'Feature_2']].values
y = data['Label'].values
# 将数据集分割为训练集和测试集
train_size = int(0.8 * len(X))
X_train, y_train = X[:train_size], y[:train_size]
X_test, y_test = X[train_size:], y[train_size:]
# 计算类别均值
mean_class0 = np.mean(X_train[y_train == 0], axis=0)
mean_class1 = np.mean(X_train[y_train == 1], axis=0)
# 计算类内散度矩阵(Within-class scatter matrix)
Sw = np.dot((X_train[y_train == 0] - mean_class0).T, (X_train[y_train == 0] - mean_class0)) + np.dot((X_train[y_train == 1] - mean_class1).T, (X_train[y_train == 1] - mean_class1))
# 计算类间散度矩阵(Between-class scatter matrix)
Sb = np.outer((mean_class0 - mean_class1), (mean_class0 - mean_class1))
# 计算广义特征值问题的解
eigenvalues, eigenvectors = np.linalg.eig(np.linalg.inv(Sw).dot(Sb))
# 选取前N-1个特征向量
sorted_indices = np.argsort(eigenvalues)[::-1]
w = eigenvectors[:, sorted_indices[:1]]
# 投影训练数据
X_train_lda = np.dot(X_train, w)
# 投影测试数据
X_test_lda = np.dot(X_test, w)
- 采用基于平均值的分类器
from sklearn.metrics import accuracy_score, confusion_matrix, classification_report
# 定义简单的线性阈值分类器
threshold = np.mean(X_train_lda)
y_pred_train = (X_train_lda > threshold).astype(int)
y_pred_test = (X_test_lda > threshold).astype(int)
# 绘制决策边界
threshold = np.dot((mean_class0 + mean_class1) / 2, w)
x_boundary = np.linspace(min(X[:, 0]), max(X[:, 0]), 100)
y_boundary = (threshold - x_boundary * w[0]) / w[1]
# 绘制投影前的散点图
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
plt.scatter(X_train[y_train == 0][:, 0], X_train[y_train == 0][:, 1], c='blue', label='Class 0', marker='o')
plt.scatter(X_train[y_train == 1][:, 0], X_train[y_train == 1][:, 1], c='red', label='Class 1', marker='x')
plt.title('Scatter Plot before LDA (Training Set)')
plt.plot(x_boundary, y_boundary, color='black', linestyle='--', label='Decision Boundary')
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.legend(bbox_to_anchor=(1.05, 1), loc='upper left')
plt.tight_layout()
plt.show()
# 输出准确率、混淆矩阵和分类报告
print("Testing Accuracy:", accuracy_score(y_test, y_pred_test))
conf_matrix_test = confusion_matrix(y_test, y_pred_test)
print("Confusion Matrix (Testing Set):\n", conf_matrix_test)
class_report_test = classification_report(y_test, y_pred_test)
print("Classification Report (Testing Set):\n", class_report_test)
Testing Accuracy: 0.975
Confusion Matrix (Testing Set):
[[178 4]
[ 6 212]]
Classification Report (Testing Set):
precision recall f1-score support
0 0.97 0.98 0.97 182
1 0.98 0.97 0.98 218
accuracy 0.97 400
macro avg 0.97 0.98 0.97 400
weighted avg 0.98 0.97 0.98 400
- 测试准确度: 0.975
- 精确度: 分类为正例的样本中,实际为正例的比例。对于类别0和类别1,分别为0.97和0.98。
- 召回率: 实际为正例的样本中,被成功分类为正例的比例。对于类别0和类别1,分别为0.98和0.97。
- F1分数: 精确度和召回率的加权调和平均。对于类别0和类别1,分别为0.97和0.98。
综合而言,该模型在测试集上取得了较高的准确性,混淆矩阵显示了良好的分类结果,而分类报告进一步确认了其在精确度、召回率和F1分数上的优越表现。
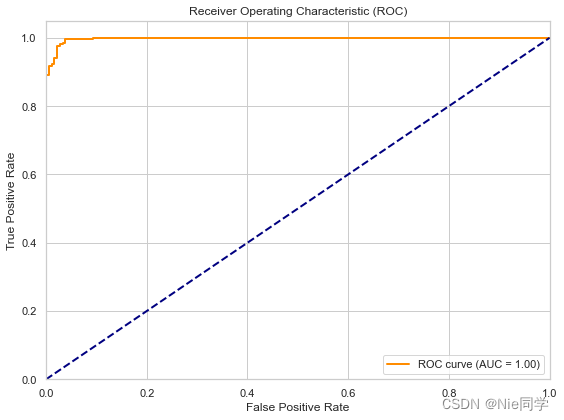
- 采用ROC曲线选择阈值
from sklearn.metrics import roc_curve, roc_auc_score
# 计算 ROC 曲线
fpr, tpr, thresholds = roc_curve(y_test, X_test_lda)
# 计算 AUC
roc_auc = roc_auc_score(y_test, X_test_lda)
# 绘制 ROC 曲线
plt.figure(figsize=(8, 6))
plt.plot(fpr, tpr, color='darkorange', lw=2, label='ROC curve (AUC = {:.2f})'.format(roc_auc))
plt.plot([0, 1], [0, 1], color='navy', lw=2, linestyle='--')
plt.xlim([0.0, 1.0])
plt.ylim([0.0, 1.05])
plt.xlabel('False Positive Rate')
plt.ylabel('True Positive Rate')
plt.title('Receiver Operating Characteristic (ROC)')
plt.legend(loc='lower right')
plt.tight_layout()
plt.show()
# 选择最佳阈值
best_threshold_index = np.argmax(tpr - fpr)
best_threshold = thresholds[best_threshold_index]
# 根据最佳阈值重新定义分类器结果
y_pred_best_threshold_test = (X_test_lda > best_threshold).astype(int)
# 计算决策边界
x_values = np.linspace(min(X[:, 0]), max(X[:, 0]), 100)
y_values = (best_threshold - x_values * w[0]) / w[1]
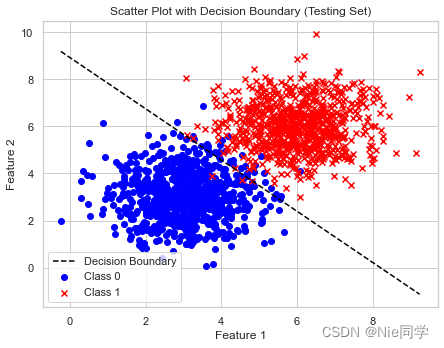
# 绘制散点图和决策边界(在原始特征空间中)
plt.figure(figsize=(12, 5))
# 散点图
plt.subplot(1, 2, 1)
plt.scatter(X_train[y_train == 0][:, 0], X_train[y_train == 0][:, 1], c='blue', label='Class 0', marker='o')
plt.scatter(X_train[y_train == 1][:, 0], X_train[y_train == 1][:, 1], c='red', label='Class 1', marker='x')
plt.plot(x_values, y_values, color='black', linestyle='--', label='Decision Boundary')
plt.title('Scatter Plot before LDA (Testing Set)')
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.legend()
plt.title('Scatter Plot with Decision Boundary (Testing Set)')
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.legend()
plt.tight_layout()
plt.show()
# 输出准确率、混淆矩阵和分类报告(使用最佳阈值)
print("Testing Accuracy (Best Threshold):", accuracy_score(y_test, y_pred_best_threshold_test))
conf_matrix_test_best_threshold = confusion_matrix(y_test, y_pred_best_threshold_test)
print("Confusion Matrix (Testing Set - Best Threshold):\n", conf_matrix_test_best_threshold)
class_report_test_best_threshold = classification_report(y_test, y_pred_best_threshold_test)
print("Classification Report (Testing Set - Best Threshold):\n", class_report_test_best_threshold)
Testing Accuracy (Best Threshold): 0.9775
Confusion Matrix (Testing Set - Best Threshold):
[[175 7]
[ 2 216]]
Classification Report (Testing Set - Best Threshold):
precision recall f1-score support
0 0.99 0.96 0.97 182
1 0.97 0.99 0.98 218
accuracy 0.98 400
macro avg 0.98 0.98 0.98 400
weighted avg 0.98 0.98 0.98 400
- 测试准确度: 0.9775
- 精确度: 模型正确预测正类别的概率。在测试集上,正类别的精确度为 0.97。
- 召回率: 模型正确预测正类别的概率。在测试集上,正类别的精确度为 0.97。
- F1分数: 精确度和召回率的调和平均值。在测试集上,F1-score 为 0.98。
总体而言,模型在测试集上取得了很好的性能,具有高的准确率、精确度和召回率。
两种选择阈值策略的对比:
- 采用 ROC 曲线选择阈值的策略在准确率上略微优于基于平均值的分类器。
- 采用 ROC 曲线选择阈值的策略在混淆矩阵和分类报告中显示更多的 True Positive(TP)和稍少的 False Positive(FP)。
- 两种策略都表现出很高的准确率、精确度、召回率和 F1 分数,但采用 ROC 曲线选择阈值的策略在某些指标上稍微更优。
综合而言,两种策略都取得了良好的性能,但具体选择哪种策略可能取决于任务的具体需求和偏好。
智能推荐
Linux查看登录用户日志_怎么记录linux设备 发声的登录和登出-程序员宅基地
文章浏览阅读8.6k次。一、Linux记录用户登录信息文件1 /var/run/utmp----记录当前正在登录系统的用户信息;2 /var/log/wtmp----记录当前正在登录和历史登录系统的用户信息;3 /var/log/btmp:记录失败的登录尝试信息。二、命令用法1.命令last,lastb---show a listing of la_怎么记录linux设备 发声的登录和登出
第四章笔记:遍历--算法学中的万能钥匙-程序员宅基地
文章浏览阅读167次。摘要:1. 简介 2. 公园迷宫漫步 3. 无线迷宫与最短(不加权)路径问题 4. 强连通分量1. 简介在计算机科学裡,树的遍历(也称为树的搜索)是圖的遍歷的一种,指的是按照某种规则,不重复地访问某种樹的所有节点的过程。具体的访问操作可能是检查节点的值、更新节点的值等。不同的遍历方式,其访问节点的顺序是不一样的。两种著名的基本遍历策略:深度优先搜索(DFS) 和 广度优先搜索(B...
【案例分享】使用ActiveReports报表工具,在.NET MVC模式下动态创建报表_activereports.net 实现查询报表功能-程序员宅基地
文章浏览阅读591次。提起报表,大家会觉得即熟悉又陌生,好像常常在工作中使用,又似乎无法准确描述报表。今天我们来一起了解一下什么是报表,报表的结构、构成元素,以及为什么需要报表。什么是报表简单的说:报表就是通过表格、图表等形式来动态显示数据,并为使用者提供浏览、打印、导出和分析的功能,可以用公式表示为:报表 = 多样的布局 + 动态的数据 + 丰富的输出报表通常包含以下组成部分:报表首页:在报表的开..._activereports.net 实现查询报表功能
Ubuntu18.04 + GNOME xrdp + Docker + GUI_docker xrdp ubuntu-程序员宅基地
文章浏览阅读6.6k次。最近实验室需要用Cadence,这个软件的安装非常麻烦,每一次配置都要几个小时,因此打算把Cadence装进Docker。但是Cadence运行时需要GUI,要对Docker进行一些配置。我们实验室的服务器运行的是Ubuntu18.04,默认桌面GNOME,Cadence装进Centos的Docker。安装Ubuntu18.04服务器上安装Ubuntu18.04的教程非常多,在此不赘述了安装..._docker xrdp ubuntu
iOS AVFoundation实现相机功能_ios avcapturestillimageoutput 兼容性 ios17 崩溃-程序员宅基地
文章浏览阅读1.8k次,点赞2次,收藏2次。首先导入头文件#import 导入头文件后创建几个相机必须实现的对象 /** * AVCaptureSession对象来执行输入设备和输出设备之间的数据传递 */ @property (nonatomic, strong) AVCaptureSession* session; /** * 输入设备 */_ios avcapturestillimageoutput 兼容性 ios17 崩溃
Oracle动态性能视图--v$sysstat_oracle v$sysstat视图-程序员宅基地
文章浏览阅读982次。按照OracleDocument中的描述,v$sysstat存储自数据库实例运行那刻起就开始累计全实例(instance-wide)的资源使用情况。 类似于v$sesstat,该视图存储下列的统计信息:1>.事件发生次数的统计(如:user commits)2>._oracle v$sysstat视图
随便推点
Vue router报错:NavigationDuplicated {_name: "NavigationDuplicated", name: "NavigationDuplicated"}的解决方法_navigationduplicated {_name: 'navigationduplicated-程序员宅基地
文章浏览阅读7.6k次,点赞2次,收藏9次。我最近做SPA项目开发动态树的时候一直遇到以下错误:当我点击文章管理需要跳转路径时一直报NavigationDuplicated {_name: “NavigationDuplicated”, name: “NavigationDuplicated”}这个错误但是当我点击文章管理后,路径跳转却是成功的<template> <div> 文章管理页面 <..._navigationduplicated {_name: 'navigationduplicated', name: 'navigationduplic
Webrtc回声消除模式(Aecm)屏蔽舒适噪音(CNG)_webrtc aecm 杂音-程序员宅基地
文章浏览阅读3.9k次。版本VoiceEngine 4.1.0舒适噪音生成(comfort noise generator,CNG)是一个在通话过程中出现短暂静音时用来为电话通信产生背景噪声的程序。#if defined(WEBRTC_ANDROID) || defined(WEBRTC_IOS)static const EcModes kDefaultEcMode = kEcAecm;#elsestati..._webrtc aecm 杂音
医学成像原理与图像处理一:概论_医学成像与图像处理技术知识点总结-程序员宅基地
文章浏览阅读6.3k次,点赞9次,收藏19次。医学成像原理与图像处理一:概论引言:本系列博客为医学成像原理与图像处理重要笔记,由于是手写,在此通过扫描录入以图片的形式和电子版增补内容将其进行组织和共享。前半部分内容为图像处理基础内容,包括图像的灰度级处理、空间域滤波、频率域滤波、图像增强和分割等;后半部分内容为医学影象技术,包括常规胶片X光机、CR、DR、CT、DSA等X射线摄影技术、超声成像技术、磁共振成像(MRI)技术等。本篇主要内容是概论。_医学成像与图像处理技术知识点总结
notepad++ v8.5.3 安装插件,安装失败怎么处理?下载进度为0怎么处理?_nodepa++-程序员宅基地
文章浏览阅读591次,点赞13次,收藏10次。notepad++ v8.5.3 安装插件,下载进度为0_nodepa++
hive某个字段中包括\n(和换行符冲突)_hive sql \n-程序员宅基地
文章浏览阅读2.1w次。用spark执行SQL保存到Hive中: hiveContext.sql("insert overwrite table test select * from aaa")执行完成,没报错,但是核对结果的时候,发现有几笔数据超出指定范围(实际只包含100/200)最终排查到是ret_pay_remark 字段包含换行符,解决方案:执行SQL中把特殊字符替换掉regexp_replace(..._hive sql \n
印象笔记05:如何打造更美的印象笔记超级笔记_好的印象笔记怎么做的-程序员宅基地
文章浏览阅读520次,点赞10次,收藏8次。印象笔记05:如何打造更美的印象笔记超级笔记本文介绍印象笔记的具体使用,如何打造更美更实用的笔记。首先想要笔记更加好看和实用,我认为要使用超级笔记。所谓超级笔记就是具有很多便捷功能的笔记。_好的印象笔记怎么做的