mtk cam_cal eeprom 驱动_camera_eeprom1-程序员宅基地
技术标签: camera
文章目录
前言
一直接触驱动,但没有系统的去学过驱动,对设备驱动的大体架构不是很了解,借着eeprom驱动,大致学习下linux下设备驱动以及i2c驱动。
1.驱动架构
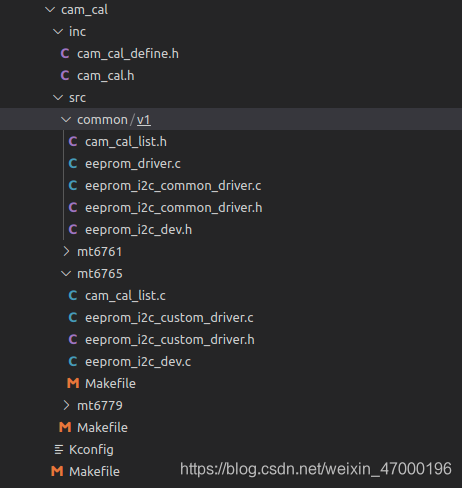
1.1 结构目录
android/kernel-4.19/drivers/misc/mediatek/cam_cal
1.2 内核编译相关
在bringup阶段,会在
android/kernel-4.19/arch/arm64/configs/{project}_debug_defconfig与
android/kernel-4.19/arch/arm64/configs/{project}_defconfig配置
CONFIG_MTK_CAM_CAL=y
最下面mk与Kconfig为
这里相当于指定了obj-y,将生成的目标代码连接到内核。将src/目录列入向下迭代的目录中。
obj-$(CONFIG_MTK_CAM_CAL) += src/
Kconfig
config MTK_CAM_CAL
bool "MTK camera cal driver"
help
CONFIG_MTK_CAM_CAL define if the camera cal driver should be
built in or not. If you want to use EEPROM for sensor. You have
enable CONFIG_MTK_CAM_CAL on ProjectConfig. The kernel space for
EEPROM will be build. It may be like as "/dev/CAM_CAL_DRV".
Use space code will control the driver by open and ioctrl this one.
在上一层的android/kernel-4.19/drivers/misc/mediatek/Kconfig中
引用了此Kconfig
source "drivers/misc/mediatek/cam_cal/Kconfig"
makefile中
obj-$(CONFIG_MTK_CAM_CAL) += cam_cal/
1.3 Makefile
接下来看驱动里面的makefile
android/kernel-4.19/drivers/misc/mediatek/cam_cal/src/Makefile
MTK_PLATFORM := $(subst ",,$(CONFIG_MTK_PLATFORM))
obj-y += $(MTK_PLATFORM)/
适配不同平台
:= 直接赋值 mk :=含义
subst 字符串替换,subst
进入到平台下:这里看mt6765/
MTK_CUSTOM_PATH := $(srctree)/drivers/misc/mediatek
MTK_PLATFORM := $(subst ",,$(CONFIG_MTK_PLATFORM))
CAM_CAL_SRC_PATH := $(MTK_CUSTOM_PATH)/cam_cal/src
CAM_CAL_PLATFORM_SRC_PATH := $(CAM_CAL_SRC_PATH)/$(MTK_PLATFORM)
ARCH_MTK_PROJECT := $(subst ",,$(CONFIG_ARCH_MTK_PROJECT))
COMMON_VERSION := v1
subdir-ccflags-y += -I$(MTK_CUSTOM_PATH)/imgsensor/inc \
-I$(MTK_CUSTOM_PATH)/imgsensor/src/$(CONFIG_MTK_PLATFORM)/camera_hw \
-I$(MTK_CUSTOM_PATH)/cam_cal/inc \
-I$(CAM_CAL_PLATFORM_SRC_PATH) \
-I$(CAM_CAL_SRC_PATH)/common/$(COMMON_VERSION)
subdir-ccflags-y += -I$(srctree)/drivers/i2c/busses/
# Common code
obj-y += ../common/$(COMMON_VERSION)/eeprom_driver.o
obj-y += ../common/$(COMMON_VERSION)/eeprom_i2c_common_driver.o
# Platform code
obj-y += eeprom_i2c_custom_driver.o
define INC_CUSTOM_SRC
ifeq ($(wildcard $(CAM_CAL_PLATFORM_SRC_PATH)/camera_project/$(ARCH_MTK_PROJECT)/$(1).c),)
obj-y += $(1).o
else
obj-y += camera_project/$(ARCH_MTK_PROJECT)/$(1).o
endif
endef
# Project or platform code
CUSTOM_SRC_LIST := cam_cal_list eeprom_i2c_dev
$(foreach src,$(CUSTOM_SRC_LIST),$(eval $(call INC_CUSTOM_SRC,$(src))))
subdir-ccflags-y += -I
意思是ccflags-y,编译时的参数,-I寻找头文件的目录
参考:编译选项
-I选项
此处没有针对项目客制化,camera_project/就不存在了。
此处关注
# Common code
obj-y += ../common/$(COMMON_VERSION)/eeprom_driver.o
obj-y += ../common/$(COMMON_VERSION)/eeprom_i2c_common_driver.o
# Platform code
obj-y += eeprom_i2c_custom_driver.o
这三个对应的.c文件
2.driver
参考字符驱动架构
2.1 init
android/kernel-4.19/drivers/misc/mediatek/cam_cal/src/common/v1/eeprom_driver.c
首先,模块加载方法与卸载方法
static int __init EEPROM_drv_init(void)
{
pr_debug("%s Start!\n", __func__);
if (platform_driver_register(&g_stEEPROM_HW_Driver)) {
pr_debug("failed to register EEPROM driver i2C main\n");
return -ENODEV;
}
if (platform_device_register(&g_platDev)) {
pr_debug("failed to register EEPROM device");
return -ENODEV;
}
EEPROM_chrdev_register();
pr_debug("%s End!\n", __func__);
return 0;
}
static void __exit EEPROM_drv_exit(void)
{
platform_device_unregister(&g_platDev);
platform_driver_unregister(&g_stEEPROM_HW_Driver);
EEPROM_chrdev_unregister();
}
module_init(EEPROM_drv_init);
module_exit(EEPROM_drv_exit);
platform_driver_register可参考
其中:g_stEEPROM_HW_Driver 对应
static struct platform_driver g_stEEPROM_HW_Driver = {
.probe = EEPROM_HW_probe,
.remove = EEPROM_HW_remove,
.driver = {
.name = CAM_CAL_DRV_NAME,
.owner = THIS_MODULE,
}
};
EEPROM_chrdev_register()进行分配设备号等操作:
关键是g_charDrv,是一个cdev类型的结构体参考:cdev
static struct cdev *g_charDrv;
#define CAM_CAL_DYNAMIC_ALLOCATE_DEVNO 1
static inline int EEPROM_chrdev_register(void)
{
struct device *device = NULL;
pr_debug("%s Start\n", __func__);
#if CAM_CAL_DYNAMIC_ALLOCATE_DEVNO
if (alloc_chrdev_region(&g_devNum, 0, 1, CAM_CAL_DRV_NAME)) {
//动态分配主次设备号
pr_debug("Allocate device no failed\n");
return -EAGAIN;
}
#else
if (register_chrdev_region(g_devNum, 1, CAM_CAL_DRV_NAME)) {
pr_debug("Register device no failed\n");
return -EAGAIN;
}
#endif
g_charDrv = cdev_alloc();//空间的申请
if (g_charDrv == NULL) {
unregister_chrdev_region(g_devNum, 1);
pr_debug("Allocate mem for kobject failed\n");
return -ENOMEM;
}
cdev_init(g_charDrv, &g_stCAM_CAL_fops1);//对空间清零并赋值ops
g_charDrv->owner = THIS_MODULE;
if (cdev_add(g_charDrv, g_devNum, 1)) {
//注册字符设备对象cdev到内核
pr_debug("Attatch file operation failed\n");
unregister_chrdev_region(g_devNum, 1);
return -EAGAIN;
}
g_drvClass = class_create(THIS_MODULE, "CAM_CALdrv1");
// 以CLASS_NAME创建一个class结构,这个动作将会在/sys/class目录创建一个名为CLASS_NAME的目录
if (IS_ERR(g_drvClass)) {
int ret = PTR_ERR(g_drvClass);
pr_debug("Unable to create class, err = %d\n", ret);
return ret;
}
device = device_create(g_drvClass, NULL, g_devNum, NULL,
CAM_CAL_DRV_NAME);
//以DEVICE_NAME为名,参考/sys/class/CLASS_NAME在/dev目录下创建一个设备:/dev/DEVICE_NAME
pr_debug("%s End\n", __func__);
return 0;
}
alloc_chrdev_region(&g_devNum, 0, 1, CAM_CAL_DRV_NAME)// 为字符设备动态申请第一个设备号
CAM_CAL_DRV_NAME定义为,也就是设备节点,在/dev下面可以看到
#define CAM_CAL_DRV_NAME "CAM_CAL_DRV"
alloc_chrdev_region动态分配主次设备号,详细参考
&g_devNum为
#define CAM_CAL_DEV_MAJOR_NUMBER 226
static dev_t g_devNum = MKDEV(CAM_CAL_DEV_MAJOR_NUMBER, 0);
MKDEV是将主设备号和次设备号转换成dev_t类型的一个内核函数。参考
cdev_alloc与cdev_init参考
cdev_add 注册字符设备对象cdev到内核,
这里的g_stCAM_CAL_fops1,可参考
对应:
static const struct file_operations g_stCAM_CAL_fops1 = {
.owner = THIS_MODULE,
.open = EEPROM_drv_open,
.release = EEPROM_drv_release,
/*.ioctl = CAM_CAL_Ioctl */
#ifdef CONFIG_COMPAT
.compat_ioctl = EEPROM_drv_compat_ioctl,
#endif
.unlocked_ioctl = EEPROM_drv_ioctl
};
CONFIG_COMPAT是用来兼容64位与32位的,
2.1 EEPROM_drv_ioctl
接下来看ioctl实现,先看两个重要的机构体
stCAM_CAL_INFO_STRUCT
struct stCAM_CAL_INFO_STRUCT {
u32 u4Offset;
u32 u4Length;
u32 sensorID;
/*
* MAIN = 0x01,
* SUB = 0x02,
* MAIN_2 = 0x04,
* SUB_2 = 0x08,
* MAIN_3 = 0x10,
*/
u32 deviceID;
u8 *pu1Params;
};
stCAM_CAL_CMD_INFO_STRUCT
struct stCAM_CAL_CMD_INFO_STRUCT {
unsigned int sensorID;
unsigned int deviceID;
unsigned int i2cAddr;
struct i2c_client *client;
cam_cal_cmd_func readCMDFunc;
cam_cal_cmd_func writeCMDFunc;
unsigned int maxEepromSize;
};
ioctl实现
static long EEPROM_drv_ioctl(struct file *file,
unsigned int a_u4Command, unsigned long a_u4Param)
{
int i4RetValue = 0;
u8 *pBuff = NULL;
u8 *pu1Params = NULL;
/*u8 *tempP = NULL; */
struct stCAM_CAL_INFO_STRUCT *ptempbuf = NULL;
struct stCAM_CAL_CMD_INFO_STRUCT *pcmdInf = NULL;//初始化
if (_IOC_DIR(a_u4Command) != _IOC_NONE) {
//判断传送到设备驱动程序的 cmd 命令的读写状态
pBuff = kmalloc(sizeof(struct stCAM_CAL_INFO_STRUCT),
GFP_KERNEL);//分配内存,GFP_KERNEL是内核内存分配时最常用的,无内存可用时可引起休眠
if (pBuff == NULL) {
pr_debug("ioctl allocate pBuff mem failed\n");
return -ENOMEM;
}
if (copy_from_user
((u8 *) pBuff, (u8 *) a_u4Param,
sizeof(struct stCAM_CAL_INFO_STRUCT))) {
//将用户空间a_u4Param拷贝到pBuff
/*get input structure address */
kfree(pBuff);
pr_debug("ioctl copy from user failed\n");
return -EFAULT;
}
ptempbuf = (struct stCAM_CAL_INFO_STRUCT *)pBuff;
if ((ptempbuf->u4Length <= 0) ||
(ptempbuf->u4Length > CAM_CAL_MAX_BUF_SIZE)) {
//防止上层传下来的参数过大或过小
kfree(pBuff);
pr_debug("Buffer Length Error!\n");
return -EFAULT;
}
pu1Params = kmalloc(ptempbuf->u4Length, GFP_KERNEL);//为u4Length分配空间
if (pu1Params == NULL) {
kfree(pBuff);
pr_debug("ioctl allocate pu1Params mem failed\n");
return -ENOMEM;
}
if (copy_from_user
((u8 *) pu1Params, (u8 *) ptempbuf->pu1Params,
ptempbuf->u4Length)) {
//拿到参数
kfree(pBuff);
kfree(pu1Params);
pr_debug("ioctl copy from user failed\n");
return -EFAULT;
}
}
if (ptempbuf == NULL) {
/*It have to add */
pr_debug("ptempbuf is Null !!!");
return -EFAULT;
}
switch (a_u4Command) {
case CAM_CALIOC_S_WRITE: /*Note: Write Command is Unverified! */
pr_debug("CAM_CALIOC_S_WRITE start!\n");
pcmdInf = EEPROM_get_cmd_info_ex(ptempbuf->sensorID,
ptempbuf->deviceID);//根据id,拿到i2c地址,读写函数
/* Check the max size if specified */
if (pcmdInf != NULL &&
(pcmdInf->maxEepromSize != 0) &&
(pcmdInf->maxEepromSize <
(ptempbuf->u4Offset + ptempbuf->u4Length))) {
pr_debug("Error!! not support address >= 0x%x!!\n",
pcmdInf->maxEepromSize);
kfree(pBuff);
kfree(pu1Params);
return -EFAULT;
}
if (pcmdInf != NULL && g_lastDevID != ptempbuf->deviceID) {
if (EEPROM_set_i2c_bus(ptempbuf->deviceID,//设置i2c
pcmdInf) != 0) {
pr_debug("deviceID Error!\n");
kfree(pBuff);
kfree(pu1Params);
return -EFAULT;
}
g_lastDevID = ptempbuf->deviceID;
}
if (pcmdInf != NULL) {
if (pcmdInf->writeCMDFunc != NULL) {
i4RetValue = pcmdInf->writeCMDFunc(//执行写函数
pcmdInf->client,
ptempbuf->u4Offset, pu1Params,
ptempbuf->u4Length);
} else
pr_debug("pcmdInf->writeCMDFunc == NULL\n");
} else
pr_debug("pcmdInf == NULL\n");
pr_debug("CAM_CALIOC_S_WRITE End!\n");
break;
case CAM_CALIOC_G_READ:
pr_debug("CAM_CALIOC_G_READ start! offset=%d, length=%d\n",
ptempbuf->u4Offset, ptempbuf->u4Length);
pr_debug("SensorID=%x DeviceID=%x\n",
ptempbuf->sensorID, ptempbuf->deviceID);
pcmdInf = EEPROM_get_cmd_info_ex(
ptempbuf->sensorID,
ptempbuf->deviceID);
/* Check the max size if specified */
if (pcmdInf != NULL &&
(pcmdInf->maxEepromSize != 0) &&
(pcmdInf->maxEepromSize <
(ptempbuf->u4Offset + ptempbuf->u4Length))) {
pr_debug("Error!! not support address >= 0x%x!!\n",
pcmdInf->maxEepromSize);
kfree(pBuff);
kfree(pu1Params);
return -EFAULT;
}
if (pcmdInf != NULL && g_lastDevID != ptempbuf->deviceID) {
if (EEPROM_set_i2c_bus(ptempbuf->deviceID,
pcmdInf) != 0) {
pr_debug("deviceID Error!\n");
kfree(pBuff);
kfree(pu1Params);
return -EFAULT;
}
g_lastDevID = ptempbuf->deviceID;
}
if (pcmdInf != NULL) {
if (pcmdInf->readCMDFunc != NULL)
i4RetValue =
pcmdInf->readCMDFunc(pcmdInf->client,
ptempbuf->u4Offset,
pu1Params,
ptempbuf->u4Length);
else {
pr_debug("pcmdInf->readCMDFunc == NULL\n");
kfree(pBuff);
kfree(pu1Params);
return -EFAULT;
}
}
break;
default:
pr_debug("No CMD\n");
i4RetValue = -EPERM;
break;
}
if (_IOC_READ & _IOC_DIR(a_u4Command)) {
if (copy_to_user
((u8 __user *) ptempbuf->pu1Params, (u8 *) pu1Params,
ptempbuf->u4Length)) {
kfree(pBuff);
kfree(pu1Params);
pr_debug("ioctl copy to user failed\n");
return -EFAULT;
}
}
kfree(pBuff);
kfree(pu1Params);
return i4RetValue;
}
_IO, _IOR, _IOW, _IOWR 宏的用法与解析参考
CAM_CALIOC_G_READ定义
hal定义在/vendor/mediatek/proprietary/custom/mt6765/kernel/cam_cal/inc/cam_cal.h
kernel定义在/kernel-4.9/drivers/misc/mediatek/cam_cal/inc/
/*CAM_CAL write*/
#define CAM_CALIOC_S_WRITE _IOW(CAM_CALAGIC, 0, struct stCAM_CAL_INFO_STRUCT)
/*CAM_CAL read*/
#define CAM_CALIOC_G_READ _IOWR(CAM_CALAGIC, 5, struct stCAM_CAL_INFO_STRUCT)
ioctol函数重点关注三个部分:
EEPROM_get_cmd_info
EEPROM_set_i2c_bus
pcmdInf->readCMDFunc
这三个函数
2.2 EEPROM_get_cmd_info
EEPROM_get_cmd_info_ex会去校验配置的读写函数:
static struct stCAM_CAL_CMD_INFO_STRUCT *EEPROM_get_cmd_info_ex
(unsigned int sensorID, unsigned int deviceID)
{
int i = 0;
/* To check device ID */
for (i = 0; i < IMGSENSOR_SENSOR_IDX_MAX_NUM; i++) {
if (g_camCalDrvInfo[i].deviceID == deviceID)
break;
}
/* To check cmd from Sensor ID */
if (i == IMGSENSOR_SENSOR_IDX_MAX_NUM) {
for (i = 0; i < IMGSENSOR_SENSOR_IDX_MAX_NUM; i++) {
/* To Set Client */
if (g_camCalDrvInfo[i].sensorID == 0) {
pr_debug("Start get_cmd_info!\n");
EEPROM_get_cmd_info(sensorID,
&g_camCalDrvInfo[i]);
if (g_camCalDrvInfo[i].readCMDFunc != NULL) {
g_camCalDrvInfo[i].sensorID = sensorID;
g_camCalDrvInfo[i].deviceID = deviceID;
pr_debug("deviceID=%d, SensorID=%x\n",
deviceID, sensorID);
}
break;
}
}
}
if (i == IMGSENSOR_SENSOR_IDX_MAX_NUM) {
/*g_camCalDrvInfo is full */
return NULL;
} else {
return &g_camCalDrvInfo[i];
}
}
接着调用到EEPROM_get_cmd_info,根据sensor_id去拿到相应的配置
static int EEPROM_get_cmd_info(unsigned int sensorID,
struct stCAM_CAL_CMD_INFO_STRUCT *cmdInfo)
{
struct stCAM_CAL_LIST_STRUCT *pCamCalList = NULL;
int i = 0;
cam_cal_get_sensor_list(&pCamCalList);
if (pCamCalList != NULL) {
pr_debug("pCamCalList!=NULL && pCamCalFunc!= NULL\n");
for (i = 0; pCamCalList[i].sensorID != 0; i++) {
if (pCamCalList[i].sensorID == sensorID) {
pr_debug("pCamCalList[%d].sensorID==%x\n", i,
pCamCalList[i].sensorID);
cmdInfo->i2cAddr = pCamCalList[i].slaveID >> 1;
cmdInfo->readCMDFunc =
pCamCalList[i].readCamCalData;
//add for dual camera write cal data begin
cmdInfo->writeCMDFunc = pCamCalList[i].writeCamCalData;
//add for dual camera write cal data end
cmdInfo->maxEepromSize =
pCamCalList[i].maxEepromSize;
/*
* Default 8K for Common_read_region driver
* 0 for others
*/
if (cmdInfo->readCMDFunc == Common_read_region
&& cmdInfo->maxEepromSize == 0) {
cmdInfo->maxEepromSize =
DEFAULT_MAX_EEPROM_SIZE_8K;
}
return 1;
}
}
}
return 0;
}
cam_cal_get_sensor_list(&pCamCalList);会去拿到
struct stCAM_CAL_LIST_STRUCT g_camCalList[] = {
{
S5K3L6_SUNWIN_SENSOR_ID, 0xA0, Common_read_region,Common_write_region},
{
S5K3L6_TSP_SENSOR_ID, 0xA0, Common_read_region,Common_write_region},
/* ADD before this line */
{
0, 0, 0} /*end of list */
};
unsigned int cam_cal_get_sensor_list(
struct stCAM_CAL_LIST_STRUCT **ppCamcalList)
{
if (ppCamcalList == NULL)
return 1;
*ppCamcalList = &g_camCalList[0];
return 0;
}
2.3 EEPROM_set_i2c_bus
之前,在init时,当检测到匹配的device - driver,调用probe()函数
static struct platform_driver g_stEEPROM_HW_Driver = {
.probe = EEPROM_HW_probe,
.remove = EEPROM_HW_remove,
.driver = {
.name = CAM_CAL_DRV_NAME,
.owner = THIS_MODULE,
}
};
即:i2c_add_driver参考:i2c设备驱动
static int EEPROM_HW_probe(struct platform_device *pdev)
{
i2c_add_driver(&EEPROM_HW_i2c_driver2);
i2c_add_driver(&EEPROM_HW_i2c_driver3);
return i2c_add_driver(&EEPROM_HW_i2c_driver);
}
EEPROM_HW_i2c_driver就对应i2c_driver结构体
struct i2c_driver EEPROM_HW_i2c_driver = {
.probe = EEPROM_HW_i2c_probe,
.remove = EEPROM_HW_i2c_remove,
.driver = {
.name = CAM_CAL_DRV_NAME,
.owner = THIS_MODULE,
#ifdef CONFIG_OF
.of_match_table = EEPROM_HW_i2c_of_ids,//对应设备树节点:{.compatible = "mediatek,camera_main_eeprom",},
#endif
},
.id_table = EEPROM_HW_i2c_id,//对应宏CAM_CAL_DRV_NAME,存储driver名称,作为bus匹配时的识别
};
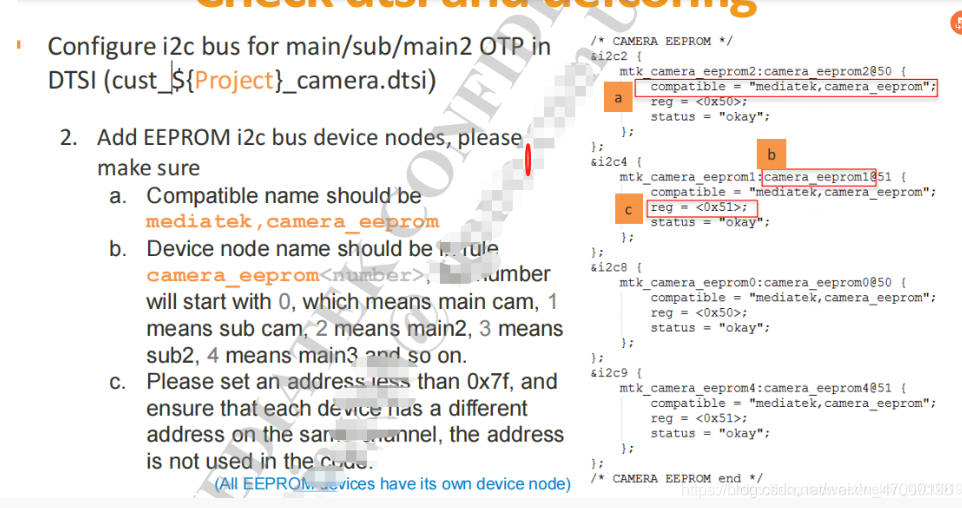
设备树节点,此处会匹配camera_main_eeprom,老平台,需在dws中去配置。
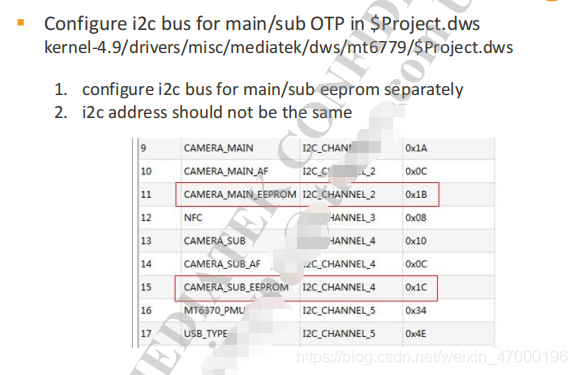
mtk 新的5g平台,直接在cust_${Project}_camera.dtsi中配置。
EEPROM_HW_i2c_probe为: 此处对client,addr等信息进行赋值
static int EEPROM_HW_i2c_probe
(struct i2c_client *client, const struct i2c_device_id *id)
{
/* get sensor i2c client */
spin_lock(&g_spinLock);
g_pstI2Cclients[I2C_DEV_IDX_1] = client;
/* set I2C clock rate */
#ifdef CONFIG_MTK_I2C_EXTENSION
g_pstI2Cclients[I2C_DEV_IDX_1]->timing = gi2c_dev_timing[I2C_DEV_IDX_1];
g_pstI2Cclients[I2C_DEV_IDX_1]->ext_flag &= ~I2C_POLLING_FLAG;
#endif
/* Default EEPROM Slave Address Main= 0xa0 */
g_pstI2Cclients[I2C_DEV_IDX_1]->addr = 0x50;
spin_unlock(&g_spinLock);
return 0;
}
接下来回到ioctol中,在ioctol中调用
if (EEPROM_set_i2c_bus(ptempbuf->deviceID,
pcmdInf) != 0)
来到:设置client与addr,addr就是从cmdInfo,即配置的结构体中拿到的
将client放到cmdInfo这个结构体中
static int EEPROM_set_i2c_bus(unsigned int deviceID,
struct stCAM_CAL_CMD_INFO_STRUCT *cmdInfo)
{
enum IMGSENSOR_SENSOR_IDX idx;
enum EEPROM_I2C_DEV_IDX i2c_idx;
struct i2c_client *client;
idx = IMGSENSOR_SENSOR_IDX_MAP(deviceID);
i2c_idx = get_i2c_dev_sel(idx);
if (idx == IMGSENSOR_SENSOR_IDX_NONE)
return -EFAULT;
if (i2c_idx < I2C_DEV_IDX_1 || i2c_idx >= I2C_DEV_IDX_MAX)
return -EFAULT;
client = g_pstI2Cclients[i2c_idx];
pr_debug("%s end! deviceID=%d index=%u client=%p\n",
__func__, deviceID, idx, client);
if (client == NULL) {
pr_err("i2c client is NULL");
return -EFAULT;
}
if (cmdInfo != NULL) {
client->addr = cmdInfo->i2cAddr;
cmdInfo->client = client;
}
return 0;
}
2.4 readCMDFunc
接下来看ioctol read中的
pcmdInf->readCMDFunc(pcmdInf->client,
ptempbuf->u4Offset,
pu1Params,
ptempbuf->u4Length);
即为:
unsigned int Common_read_region(struct i2c_client *client, unsigned int addr,
unsigned char *data, unsigned int size)
{
g_pstI2CclientG = client;
if (iReadData_CAM_CAL(addr, size, data) == 0)
return size;
else
return 0;
}
再调用到
int iReadData_CAM_CAL(unsigned int ui4_offset,
unsigned int ui4_length, unsigned char *pinputdata)
{
int i4RetValue = 0;
int i4ResidueDataLength;
u32 u4IncOffset = 0;
u32 u4CurrentOffset;
u8 *pBuff;
i4ResidueDataLength = (int)ui4_length;
u4CurrentOffset = ui4_offset;
pBuff = pinputdata;
do {
if (i4ResidueDataLength >= EEPROM_I2C_READ_MSG_LENGTH_MAX) {
i4RetValue = Read_I2C_CAM_CAL(
(u16) u4CurrentOffset,
EEPROM_I2C_READ_MSG_LENGTH_MAX, pBuff);
if (i4RetValue != 0) {
pr_debug("I2C iReadData failed!!\n");
return -1;
}
u4IncOffset += EEPROM_I2C_READ_MSG_LENGTH_MAX;
i4ResidueDataLength -= EEPROM_I2C_READ_MSG_LENGTH_MAX;
u4CurrentOffset = ui4_offset + u4IncOffset;
pBuff = pinputdata + u4IncOffset;
} else {
i4RetValue =
Read_I2C_CAM_CAL(
(u16) u4CurrentOffset, i4ResidueDataLength, pBuff);
if (i4RetValue != 0) {
pr_debug("I2C iReadData failed!!\n");
return -1;
}
u4IncOffset += i4ResidueDataLength;
i4ResidueDataLength = 0;
u4CurrentOffset = ui4_offset + u4IncOffset;
pBuff = pinputdata + u4IncOffset;
/* break; */
}
} while (i4ResidueDataLength > 0);
return 0;
}
EEPROM_I2C_READ_MSG_LENGTH_MAX
一次读多少,如果没设置,默认为一次读32次。
接下来Read_I2C_CAM_CAL,就是构建read函数:
static int Read_I2C_CAM_CAL(u16 a_u2Addr, u32 ui4_length, u8 *a_puBuff)
{
int i4RetValue = 0;
char puReadCmd[2] = {
(char)(a_u2Addr >> 8), (char)(a_u2Addr & 0xFF) };
struct i2c_msg msg[EEPROM_I2C_MSG_SIZE_READ];
if (ui4_length > EEPROM_I2C_READ_MSG_LENGTH_MAX) {
pr_debug("exceed one transition %d bytes limitation\n",
EEPROM_I2C_READ_MSG_LENGTH_MAX);
return -1;
}
spin_lock(&g_spinLock);
g_pstI2CclientG->addr =
g_pstI2CclientG->addr & (I2C_MASK_FLAG | I2C_WR_FLAG);
spin_unlock(&g_spinLock);
msg[0].addr = g_pstI2CclientG->addr;
msg[0].flags = g_pstI2CclientG->flags & I2C_M_TEN;
msg[0].len = 2;
msg[0].buf = puReadCmd;
msg[1].addr = g_pstI2CclientG->addr;
msg[1].flags = g_pstI2CclientG->flags & I2C_M_TEN;
msg[1].flags |= I2C_M_RD;
msg[1].len = ui4_length;
msg[1].buf = a_puBuff;
i4RetValue = i2c_transfer(g_pstI2CclientG->adapter,
msg,
EEPROM_I2C_MSG_SIZE_READ);
spin_lock(&g_spinLock);
g_pstI2CclientG->addr = g_pstI2CclientG->addr & I2C_MASK_FLAG;
spin_unlock(&g_spinLock);
if (i4RetValue != EEPROM_I2C_MSG_SIZE_READ) {
pr_debug("I2C read data failed!!\n");
return -1;
}
return 0;
}
智能推荐
leetcode 172. 阶乘后的零-程序员宅基地
文章浏览阅读63次。题目给定一个整数 n,返回 n! 结果尾数中零的数量。解题思路每个0都是由2 * 5得来的,相当于要求n!分解成质因子后2 * 5的数目,由于n中2的数目肯定是要大于5的数目,所以我们只需要求出n!中5的数目。C++代码class Solution {public: int trailingZeroes(int n) { ...
Day15-【Java SE进阶】IO流(一):File、IO流概述、File文件对象的创建、字节输入输出流FileInputStream FileoutputStream、释放资源。_outputstream释放-程序员宅基地
文章浏览阅读992次,点赞27次,收藏15次。UTF-8是Unicode字符集的一种编码方案,采取可变长编码方案,共分四个长度区:1个字节,2个字节,3个字节,4个字节。文件字节输入流:每次读取多个字节到字节数组中去,返回读取的字节数量,读取完毕会返回-1。注意1:字符编码时使用的字符集,和解码时使用的字符集必须一致,否则会出现乱码。定义一个与文件一样大的字节数组,一次性读取完文件的全部字节。UTF-8字符集:汉字占3个字节,英文、数字占1个字节。GBK字符集:汉字占2个字节,英文、数字占1个字节。GBK规定:汉字的第一个字节的第一位必须是1。_outputstream释放
jeecgboot重新登录_jeecg 登录自动退出-程序员宅基地
文章浏览阅读1.8k次,点赞3次,收藏3次。解决jeecgboot每次登录进去都会弹出请重新登录问题,在utils文件下找到request.js文件注释这段代码即可_jeecg 登录自动退出
数据中心供配电系统负荷计算实例分析-程序员宅基地
文章浏览阅读3.4k次。我国目前普遍采用需要系数法和二项式系数法确定用电设备的负荷,其中需要系数法是国际上普遍采用的确定计算负荷的方法,最为简便;而二项式系数法在确定设备台数较少且各台设备容量差..._数据中心用电负荷统计变压器
HTML5期末大作业:网页制作代码 网站设计——人电影网站(5页) HTML+CSS+JavaScript 学生DW网页设计作业成品 dreamweaver作业静态HTML网页设计模板_网页设计成品百度网盘-程序员宅基地
文章浏览阅读7k次,点赞4次,收藏46次。HTML5期末大作业:网页制作代码 网站设计——人电影网站(5页) HTML+CSS+JavaScript 学生DW网页设计作业成品 dreamweaver作业静态HTML网页设计模板常见网页设计作业题材有 个人、 美食、 公司、 学校、 旅游、 电商、 宠物、 电器、 茶叶、 家居、 酒店、 舞蹈、 动漫、 明星、 服装、 体育、 化妆品、 物流、 环保、 书籍、 婚纱、 军事、 游戏、 节日、 戒烟、 电影、 摄影、 文化、 家乡、 鲜花、 礼品、 汽车、 其他 等网页设计题目, A+水平作业_网页设计成品百度网盘
【Jailhouse 文章】Look Mum, no VM Exits_jailhouse sr-iov-程序员宅基地
文章浏览阅读392次。jailhouse 文章翻译,Look Mum, no VM Exits!_jailhouse sr-iov
随便推点
chatgpt赋能python:Python怎么删除文件中的某一行_python 删除文件特定几行-程序员宅基地
文章浏览阅读751次。本文由chatgpt生成,文章没有在chatgpt生成的基础上进行任何的修改。以上只是chatgpt能力的冰山一角。作为通用的Aigc大模型,只是展现它原本的实力。对于颠覆工作方式的ChatGPT,应该选择拥抱而不是抗拒,未来属于“会用”AI的人。AI职场汇报智能办公文案写作效率提升教程 专注于AI+职场+办公方向。下图是课程的整体大纲下图是AI职场汇报智能办公文案写作效率提升教程中用到的ai工具。_python 删除文件特定几行
Java过滤特殊字符的正则表达式_java正则表达式过滤特殊字符-程序员宅基地
文章浏览阅读2.1k次。【代码】Java过滤特殊字符的正则表达式。_java正则表达式过滤特殊字符
CSS中设置背景的7个属性及简写background注意点_background设置背景图片-程序员宅基地
文章浏览阅读5.7k次,点赞4次,收藏17次。css中背景的设置至关重要,也是一个难点,因为属性众多,对应的属性值也比较多,这里详细的列举了背景相关的7个属性及对应的属性值,并附上演示代码,后期要用的话,可以随时查看,那我们坐稳开车了······1: background-color 设置背景颜色2:background-image来设置背景图片- 语法:background-image:url(相对路径);-可以同时为一个元素指定背景颜色和背景图片,这样背景颜色将会作为背景图片的底色,一般情况下设置背景..._background设置背景图片
Win10 安装系统跳过创建用户,直接启用 Administrator_windows10msoobe进程-程序员宅基地
文章浏览阅读2.6k次,点赞2次,收藏8次。Win10 安装系统跳过创建用户,直接启用 Administrator_windows10msoobe进程
PyCharm2021安装教程-程序员宅基地
文章浏览阅读10w+次,点赞653次,收藏3k次。Windows安装pycharm教程新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可少的KaTeX数学公式新的甘特图功能,丰富你的文章UML 图表FLowchart流程图导出与导入导出导入下载安装PyCharm1、进入官网PyCharm的下载地址:http://www.jetbrains.com/pycharm/downl_pycharm2021
《跨境电商——速卖通搜索排名规则解析与SEO技术》一一1.1 初识速卖通的搜索引擎...-程序员宅基地
文章浏览阅读835次。本节书摘来自异步社区出版社《跨境电商——速卖通搜索排名规则解析与SEO技术》一书中的第1章,第1.1节,作者: 冯晓宁,更多章节内容可以访问云栖社区“异步社区”公众号查看。1.1 初识速卖通的搜索引擎1.1.1 初识速卖通搜索作为速卖通卖家都应该知道,速卖通经常被视为“国际版的淘宝”。那么请想一下,普通消费者在淘宝网上购买商品的时候,他的行为应该..._跨境电商 速卖通搜索排名规则解析与seo技术 pdf