Dr_can模型预测控制笔记与代码实现-程序员宅基地
最近在准备毕业设计,通过看Dr_can的视频来学习一些控制方法,视频链接https://www.bilibili.com/video/BV1cL411n7KV/?spm_id_from=333.788.recommend_more_video.0
https://www.bilibili.com/video/BV1cL411n7KV/?spm_id_from=333.788.recommend_more_video.0
由于实际需要,后续应该会更新模型预测控制在非线性领域的应用(自适应MPC,增益预定MPC,非线性MPC)
1.最优控制与代价函数
最优控制(optimal control)指的是在一定的约束情况下达到最优状态的系统表现,其中约束情况通常是实际环境所带来的限制,比如说如果你去控制方向盘的转向,方向盘的转动自身是有一个极限位置的,再比如说,对于一个卫星控制系统,三轴输出的力,力矩都有自己的极大值。
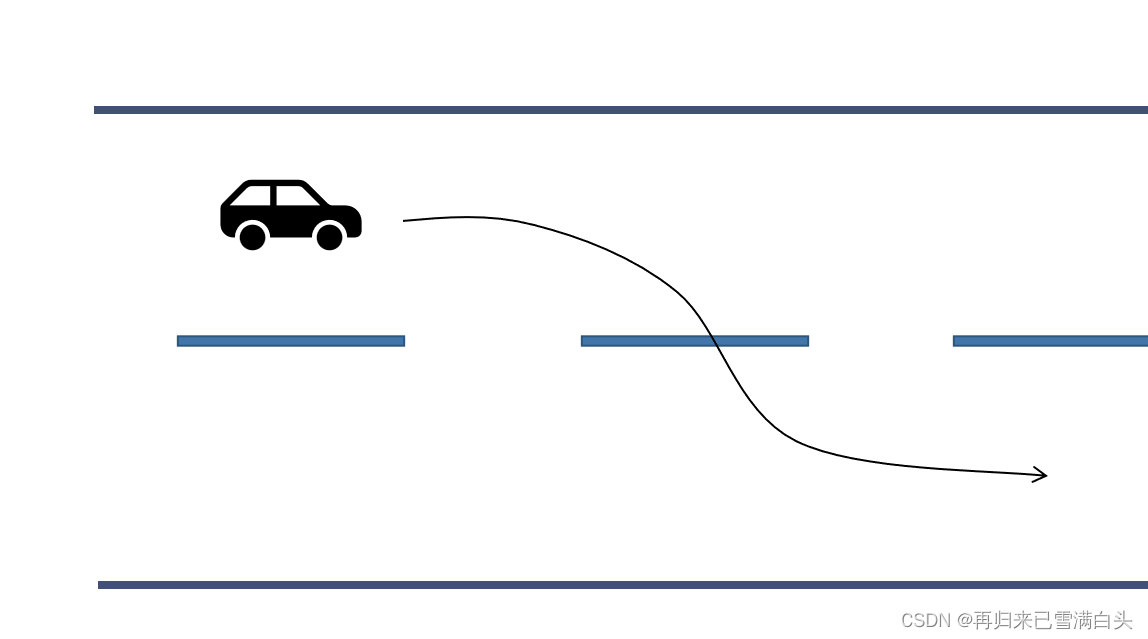
而如何去定义一个最优状态呢?首先引入一个比较直观的例子,汽车的转向变道问题:
正常来说,汽车转向变道应当追求乘客舒适度情况,如下图;
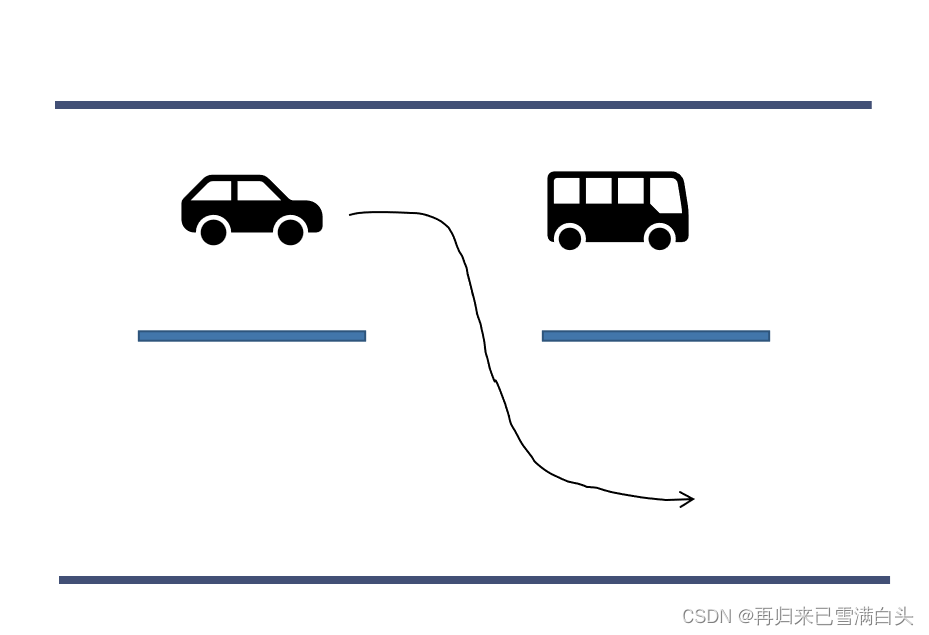
但如果考虑到紧急避障的问题,那么答案就完全不同了,如下图,当汽车前方遭遇到一辆校车急刹车时,为了躲开它,汽车必须尽快地向一侧变道,而不考虑舒适度问题。
因此,最优是需要结合系统面临的实际情况得出的概念,对于不同的应用背景,应当设定不同的指标去衡量优劣,因此我们引入代价函数(Cost Function)的概念:
首先,对于单输入单输出系统(SISO)而言,衡量系统性能优劣可以用误差的积累值(越小,代表误差越小,收敛越快)和输入的积累值
(越小,代表控制耗能越少,越节约)来衡量。
由此,我们可以定义代价函数:
函数中的q,r分别表示一个增益系数,如果q大,表示希望误差变得更小,收敛更快;r大,表示更注重输入累积,更注重节能。
接下来,我们把其推广到多输入多输出系统(MIMO),使用状态空间描述为:(这里我们假设前馈矩阵为0)
此时,衡量系统表现优劣就要引入二次型的知识,我们定义:
这里的Q和R矩阵一般是我们设定的对角矩阵,我们来举一个简单的例子:
我们假定期望输入是0,那么:
我们可以通过代价函数J的大小,来衡量系统表现的优劣,当代价函数取最小值时得到的输入,即可被称为是一种“最优输入”。
2.模型预测控制的引入
那么为什么还要引入模型预测控制的概念呢?最优控制中的代价函数需要计算从0时刻到正无穷时刻的积分,这是一种很贪婪的行为,需要消耗大量算力;同时,系统如果是一个时变系统,或者面临扰动的话,前一时刻得到的最优并不一定是下一时刻的最优值。
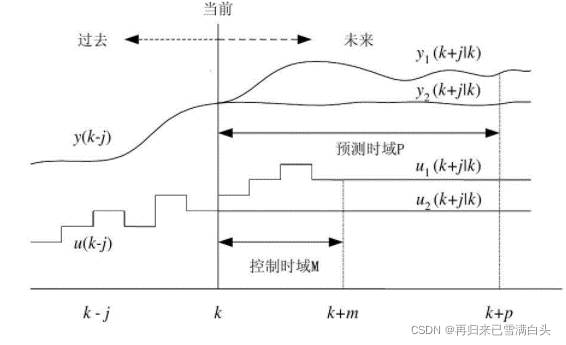
因而我们引入模型预测控制(Model Predictive Control)的概念,对于一般的离散化系统(因为实际计算机实现的控制系统都是离散的系统,连续系统离散化的方法在此不述)。在k时刻,我们可以测量或估计出系统的当前状态y(k),再通过计算得到的u(k),u(k+1),u(k+2)...u(k+j)得到系统未来状态的估计值y(k+1),y(k+2)...y(k+j);我们将预测估计的部分称为预测区间(Predictive Horizon),将控制估计的部分称为控制区间(Control Horizon),在得到最优输入之后,我们只施加当前时刻的输入u(k),而放弃接下来得到的输入序列。
总结如下:模型预测控制在k时刻共需三步;
第一步:估计/测量读取系统的当前状态;
第二步:基于u(k),u(k+1),u(k+2)...u(k+j)进行最优化处理;
离散系统的代价函数可以参考
其中EN表示误差的终值,也是衡量优劣的一种标准。
第三步:只取u(k)作为控制输入施加在系统上。
在下一时刻重复以上三步,在下一步进行预测时使用的就是下一步的状态值,我们将这样的方案称为滚动优化控制(Receding Horizon Control)。
可以看到,每一时刻都需要进行一次预测,这对算力提出了巨大的要求,同时我们在此并没考虑约束问题,这个放在之后讨论。
3.最优化建模
实现MPC有许多方法,这里介绍一种方法:二次规划(Quadratic Programming)
我们首先引入一个离散系统:
我们定义:是k时刻预测的输入值,而
是k时刻预测的状态值,我们设:
对于期望输入为0,输出向量等于状态向量的离散系统:
我们可以得到代价函数:
其中,我们需要求解的是系统的输入u(k),这就需要我们把状态项x(k)给消除掉,处理这个事情需要利用系统的状态方程,首先有
我们可以通过传感器或者状态估计得到系统当前的状态值,这相当于系统的一个初值,由初值和状态方程可以得到其他项为:
我们把它简单整理一下,有:
我们再令:
我们就得到了最简单的形式:
即:
上式还可根据之前推导的公式继续化简,
其中,与
互为转置,但他们彼此又都是常数,所以他们彼此相等,因此有:
再令
有:
由此我们就得到了模型预测控制代价函数的简单形式。
4.一个详细建模实例与完整代码
下面直接上得到最优输入U_k的代码
function U_k=MPC(A,B,N,x_k,Q,R,F)
%%%%%%%%%%%%%%%%%%%%%%%%
n = size(A,1); %% A矩阵是n * n矩阵,得到A矩阵的维数
p = size(B,2); %% B矩阵是n * p矩阵,得到B矩阵的维数
M = [eye(n);zeros(N*n,n)]; %% 初始化M矩阵,第一个分块矩阵置单位阵,其余矩阵置零
C = zeros((N+1)*n,N*p); %% 初始化C矩阵,置零
%接下来计算完整的M矩阵与C矩阵
tmp = eye(n); %定义一个n阶单位阵,工具人
for i = 1:N
rows = i*n + (1:n);%行数,因为是分块矩阵所以从1至n;
C(rows, :) = [tmp*B, C(rows-n, 1:end-p)];%用遍历的方法将C矩阵填满;
tmp = A*tmp;%每次都左乘一次A矩阵;
M(rows,:) = tmp;%写满M矩阵;
end
%定义Q_bar和R_bar
S_q = size(Q,1);%得到Q矩阵维度
S_r = size(R,1);%得到R矩阵维度
Q_bar = zeros((N+1)*S_q,(N+1)*S_q);%定义Q_bar矩阵维度
R_bar = zeros(N*S_r,N*S_r);%定义R_bar矩阵维度
for i = 0:N-1
Q_bar(i*S_q+1:(i+1)*S_q,i*S_q+1:(i+1)*S_q) = Q;%把对角线上写满Q
end
Q_bar(N*S_q+1:(N+1)*S_q, N*S_q+1:(N+1)*S_q) = F;%最后一块写上F
for i = 0:N-1
R_bar(i*S_r+1:(i+1)*S_r, i*S_r+1:(i+1)*S_r) = R;%对角线上写满R
end
G = M'*Q_bar*M;%定义M矩阵,事实上在代价函数中,这和输入无关,并没有被用到
E = M'*Q_bar*C;%定义E矩阵
H = C'*Q_bar*C + R_bar;%定义H矩阵
%最优化,得到最优输入值
f = x_k'*E;%由于quadprog函数的定义,需要把其写成矩阵相乘形式
%基于实际情况,给输入加约束
D = eye(3);b = [10;10;10];Aep=[];Bep=[];c=[1;1;1];d=[-1;-1;-1];
U_k = quadprog(H,f,D,b,Aep,Bep,d,c);%求解最优的U_k值代码中有几个值得注意的点:
1.矩阵的维度,这里面涉及矩阵很多,很容易把维度搞晕,建议自己手推一次,效果很好。
2.这段填满C矩阵的过程稍微有点难懂,是对照着C矩阵的结构以及里面的规律写出来的。
for i = 1:N
rows = i*n + (1:n);%行数,因为是分块矩阵所以从1至n;
C(rows, :) = [tmp*B, C(rows-n, 1:end-p)];%用遍历的方法将C矩阵填满;
tmp = A*tmp;%每次都左乘一次A矩阵;
M(rows,:) = tmp;%写满M矩阵;
end3.得到最优控制输入的函数quadprog,根据Matlab自带文档描述,它是求解下列问题最小值的函数,可以添加约束,由一个二次型描述与一个线性描述组成,为了使控制器的表现更贴近实际,我给输出加了正负1的限制。
接下来,我来做一个完整的仿真过程,并比对不同Q,F,R对系统的影响,假设有离散系统为:
我们设A矩阵,B矩阵分别为:
输出的期望值为零向量,设置不同的Q,R,F矩阵,进行仿真;
在第一种情况,我们令:
在第二种情况,我们令:
显然,在第一种情况我们更在意误差的收敛速度,而在第二种情况我们更在意能量消耗的多少,下面是仿真结果:
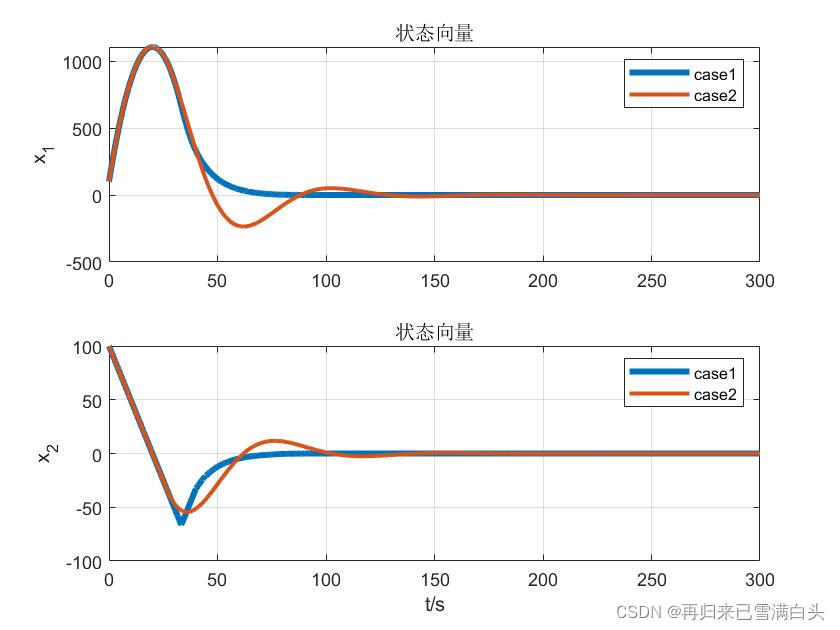
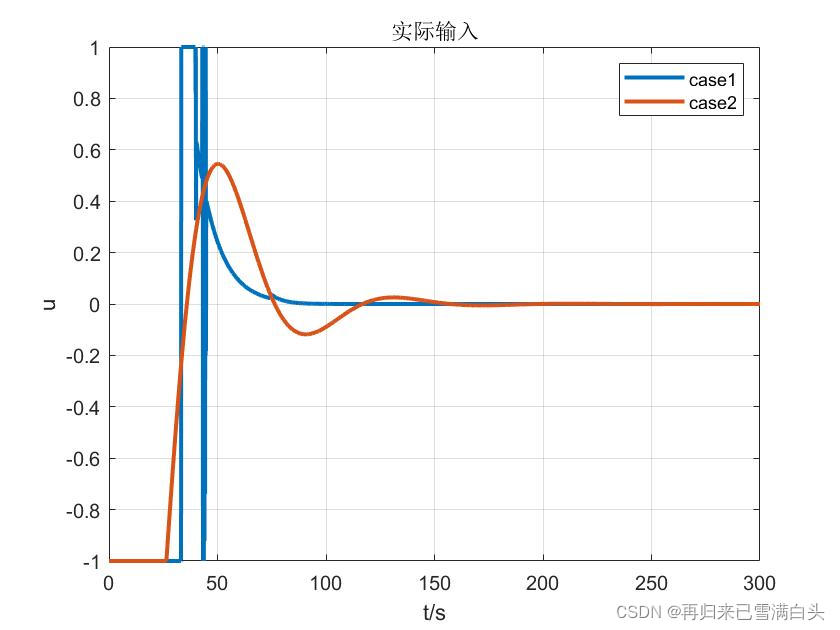

可以明显得看到,情况一收敛速度更快,耗能更多,而情况二收敛速度更慢,耗能更少,符合之前的预测。
下面是完整仿真代码:
%h为一个更新周期,即积分步长,采样时间为n
%假定输入为零,输出即为状态值
clear
clc
format long
%--------------------------初始参数---------------------------------%
h=0.1; %仿真步长
n=300; %仿真时间
NN=n/h;
A = [1,0.1;0,1]; %系统矩阵
B = [0;0.5]; %输入矩阵
Q = [2,0;0,2]; %Q矩阵,对误差积累的重视程度
R = 0.1; %R系数,表示对节省输入的重视程度
N = 3; %预测区间
F = [2,0;0,2]; %F矩阵,对终端误差的重视程度
x_0 = [100;100]; %初始位置
X1 = zeros(2,NN+1);
t = zeros(1,NN+1);
U1 = zeros(1,NN+1); %初始化
Eg1 = zeros(1,NN+1);
X1(:,1) = x_0; %赋初值
%--------------------------仿真1开始---------------------------------%
for j = 1:NN
U_all = MPC(A,B,N,X1(:,j),Q,R,F);
X1(:,j+1) = A*X1(:,j) + B*U_all(1); %这里只取预测估计的第一项
U1(j) = U_all(1);
t(j+1)=t(j)+h;
Eg1(j+1) = Eg1(j)+U_all(1)^2;
end
%%为了比较不同参数的影响,选择另一组Q,R,F
Q = [0.1,0;0,0.1]; %Q矩阵,对误差积累的重视程度
R = 10; %R系数,表示对节省输入的重视程度
F = [0.1,0;0,0.1]; %F矩阵,对终端误差的重视程度
X2 = zeros(2,NN+1);
U2 = zeros(1,NN+1); %初始化
Eg2 = zeros(1,NN+1);
X2(:,1) = x_0; %赋初值
%--------------------------仿真2开始---------------------------------%
for j = 1:NN
U_all = MPC(A,B,N,X2(:,j),Q,R,F);
X2(:,j+1) = A*X2(:,j) + B*U_all(1); %这里只取预测估计的第一项
U2(j) = U_all(1);
t(j+1)=t(j)+h;
Eg2(j+1) = Eg2(j)+U_all(1)^2;
end
figure(1)
subplot(2,1,1),plot(t,X1(1,:),'-','linewidth',3),title('状态向量'),ylabel('x_1');hold on;
plot(t,X2(1,:),'-','linewidth',2),title('状态向量'),ylabel('x_1');grid on;
legend('case1','case2');
subplot(2,1,2),plot(t,X1(2,:),'-','linewidth',3),xlabel('t/s'),ylabel('x_2');hold on
plot(t,X2(2,:),'-','linewidth',2),title('状态向量'),ylabel('x_2');grid on;
legend('case1','case2');
figure(2)
plot(t,U1,'linewidth',2),title('实际输入'),xlabel('t/s'),ylabel('u');hold on;
plot(t,U2,'linewidth',2),title('实际输入'),xlabel('t/s'),ylabel('u');grid on;
legend('case1','case2');
figure(3)
plot(t,Eg1,'linewidth',2),title('消耗能量'),xlabel('t/s'),ylabel('J');hold on;
plot(t,Eg2,'linewidth',2),title('消耗能量'),xlabel('t/s'),ylabel('J');grid on;
legend('case1','case2');智能推荐
Java--深入JDK和hotspot底层源码剖析Thread的run()、start()方法执行过程_jdk的源码hotspot跟jdk是分开的-程序员宅基地
文章浏览阅读2.1k次,点赞101次,收藏78次。【学习背景】今天主要是来了解Java线程Thread中的run()、start()两个方法的执行有哪些区别,会给出一个简单的测试代码样例,快速理解两者的区别,再从源码层面去追溯start()底层是如何最终调用Thread#run()方法的,个人觉得这样的学习不论对面试,还是实际编程来说都是比较有帮助的。进入正文~学习目录一、代码测试二、源码分析2.1 run()方法2.2 start()方法三、使用总结一、代码测试执行Thread的run()、start()方法的测试代码如下:public_jdk的源码hotspot跟jdk是分开的
透视俄乌网络战之一:数据擦除软件_俄乌网络战观察(一)-程序员宅基地
文章浏览阅读4.4k次,点赞90次,收藏85次。俄乌冲突中,各方势力通过数据擦除恶意软件破坏关键信息基础设施计算机的数据,达到深度致瘫的效果,同时窃取重要敏感信息。_俄乌网络战观察(一)
Maven私服仓库配置-Nexus详解_nexus maven-程序员宅基地
文章浏览阅读1.7w次,点赞23次,收藏139次。Maven 私服是一种特殊的Maven远程仓库,它是架设在局域网内的仓库服务,用来代理位于外部的远程仓库(中央仓库、其他远程公共仓库)。当然也并不是说私服只能建立在局域网,也有很多公司会直接把私服部署到公网,具体还是得看公司业务的性质是否是保密的等等,因为局域网的话只能在公司用,部署到公网的话员工在家里也可以办公使用。_nexus maven
基于AI的计算机视觉识别在Java项目中的使用 (四) —— 准备训练数据_java ocr ai识别训练-程序员宅基地
文章浏览阅读934次。我先用所有的样本数据对模型做几轮初步训练,让深度神经模型基本拟合(数万条记录的训练集,识别率到99%左右),具备初步的识别能力,这时的模型就是“直男”。相较于训练很多轮、拟合程度很高的“油腻男”,它的拟合程度较低,还是“直男愣头青”。..............._java ocr ai识别训练
hibernate 数据库类型 date没有时分秒解决_hibernate解析時間只有年月日沒有時分秒-程序员宅基地
文章浏览阅读688次。一、问题现象: 在数据库表中日期字段中存的日期光有年月日,没有时分秒。二、产生原因:三 解决办法 检查表的相应映射xml文件。 <property name="operateDate" type="Date">如果同上面所写,那问题出在 type类型上了正确写法 :<property name="operateDate" type="java.util..._hibernate解析時間只有年月日沒有時分秒
react-native-tab-navigator的用法_evaluating react-native-tab-navigator.js-程序员宅基地
文章浏览阅读1k次。通过react-native-tab-navigator实现下面这样的底部Tab切换安装npm install react-native-tab-navigator --save属性TabNavigator 属性 属性名 描述 sceneStyle 切换的每一屏的样式,等同于每一屏根View的样式 tabBarStyle ..._evaluating react-native-tab-navigator.js
随便推点
react常见面试题_recate面试-程序员宅基地
文章浏览阅读6.4k次,点赞6次,收藏36次。1、redux中间件中间件提供第三方插件的模式,自定义拦截 action -> reducer 的过程。变为 action -> middlewares -> reducer 。这种机制可以让我们改变数据流,实现如异步 action ,action 过滤,日志输出,异常报告等功能。常见的中间件:redux-logger:提供日志输出redux-thunk:处理异步操作..._recate面试
交叉编译jpeglib遇到的问题-程序员宅基地
文章浏览阅读405次。由于要在开发板中加载libjpeg,不能使用gcc编译的库文件给以使用,需要自己配置使用另外的编译器编译该库文件。/usr/bin/ld:.libs/jaricom.o:RelocationsingenericELF(EM:40)/usr/bin/ld:.libs/jaricom.o:RelocationsingenericELF(EM:40)...._jpeg_utils.lo: relocations in generic elf (em: 8) error adding symbols: file
【办公类-22-06】周计划系列(1)“信息窗” (2024年调整版本)-程序员宅基地
文章浏览阅读578次,点赞10次,收藏17次。【办公类-22-06】周计划系列(1)“信息窗” (2024年调整版本)
SEO优化_百度seo resetful-程序员宅基地
文章浏览阅读309次。SEO全称为Search Engine Optimization,中文解释为搜索引擎优化。一般指通过对网站内部调整优化及站外优化,使网站满足搜索引擎收录排名需求,在搜索引擎中提高关键词排名,从而把精准..._百度seo resetful
回归预测 | Matlab实现HPO-ELM猎食者算法优化极限学习机的数据回归预测_猎食者优化算法-程序员宅基地
文章浏览阅读438次。回归预测 | Matlab实现HPO-ELM猎食者算法优化极限学习机的数据回归预测_猎食者优化算法
苹果发通谍拒绝“热更新”,中国程序猿“最受伤”-程序员宅基地
文章浏览阅读55次。近日,苹果向所有开发者推送警告邮件,宣布未来将禁用 APP 内部的“动态分发”功能。并要求开发者在自家 APP 中删除 JSPatch 相关框架,否则 APP 将面临下架或禁止上架。截止发稿,已有部分开发者新递交的APP受此影响被苹果审核部门拒绝。这一动作,宣告着 APP Store 为“热更新”判了“死刑”,未来应用更新则将进入“原生”时代,用户需..._ios对开发者应用更新频次有限制吗