图像形态学轮廓处理&人脸边缘轮廓提取(下巴、嘴唇)_图像 边缘 如何处理成 轮廓-程序员宅基地
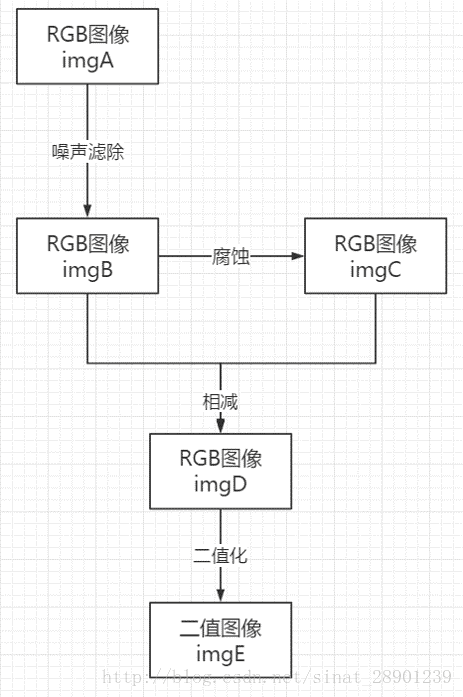
形态学轮廓提取
流程分析
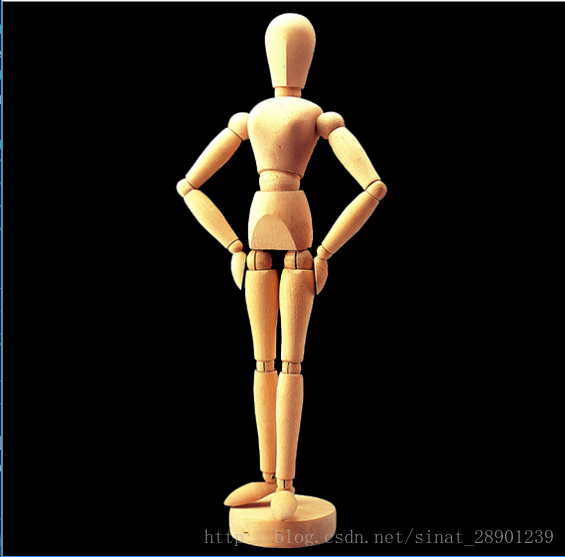
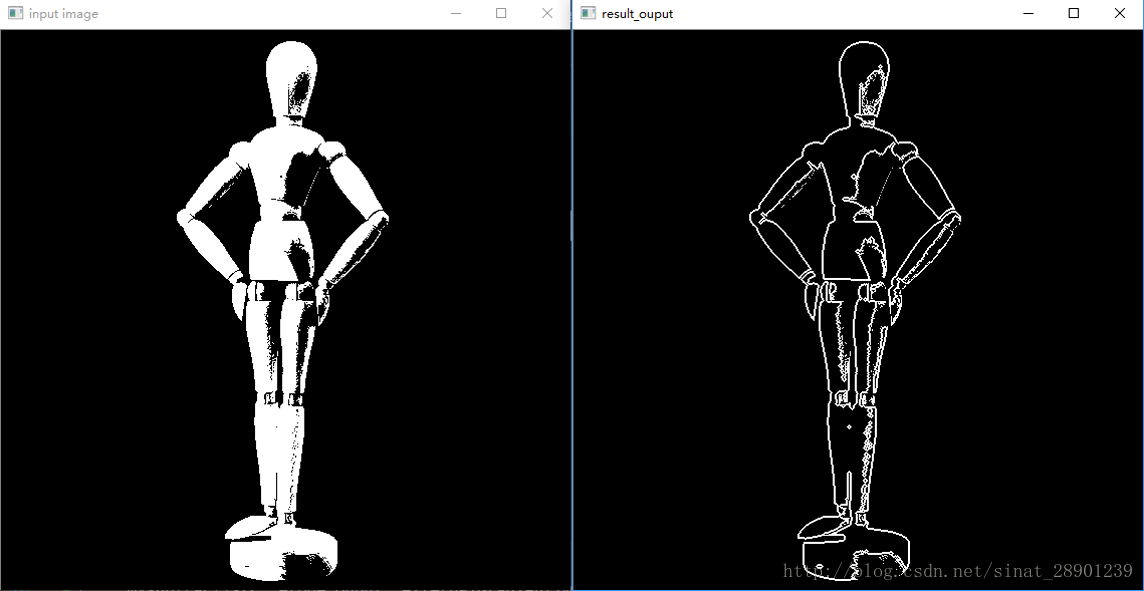
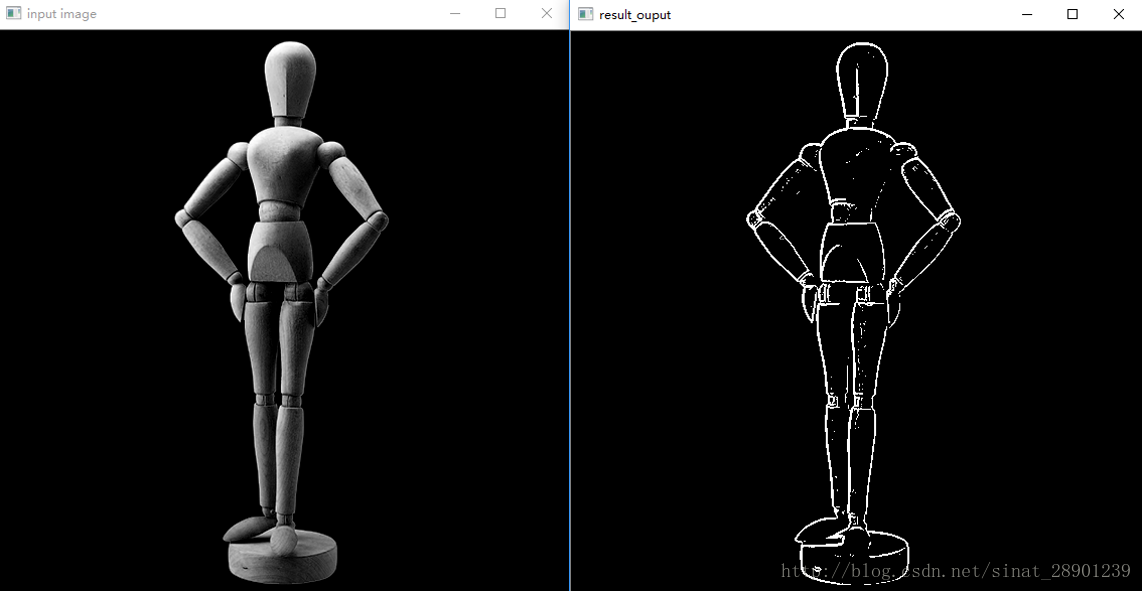
原图像imgA:
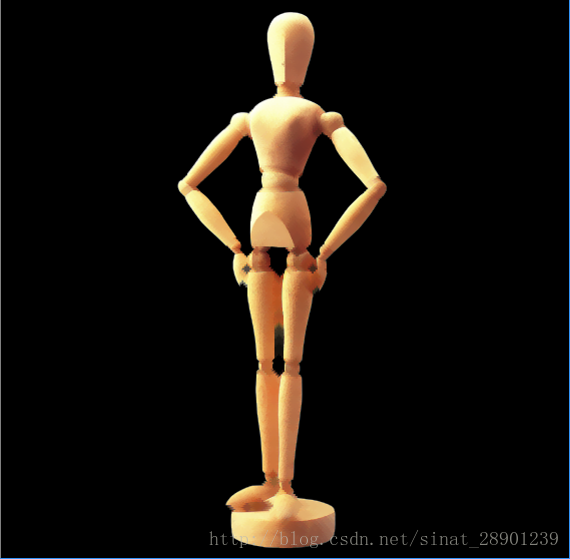
噪声滤除图像imgB:
腐蚀处理图像imgC:
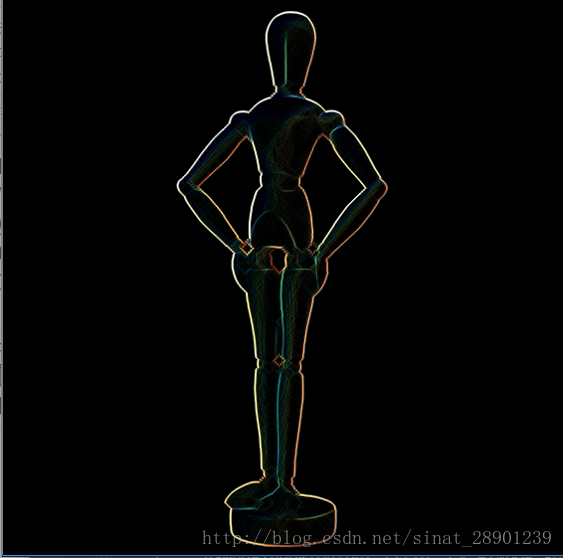
相减操作图像imgD:
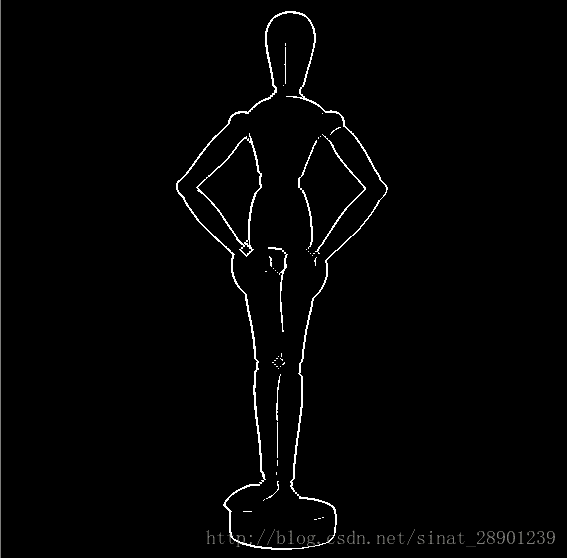
二值化处理结果imgE:
原理分析:
2.1膨胀:求像素的局部最大值
将图像(或图像的一部分区域,我们称之为A)与核(我们称之为B)进行如下卷积操作:
2.2腐蚀:求像素的局部最小值
将图像(或图像的一部分区域,我们称之为A)与核(我们称之为B)进行如下卷积操作:
(膨胀腐蚀原理详细可参见博客:http://blog.sina.com.cn/s/blog_6f57a7150100ooin.html 非常感谢博主的分享。)
2.3噪声滤除:
开运算: A∘ B=(A⊝B)⊕B
闭运算: A·B=(A⊕B)⊝B
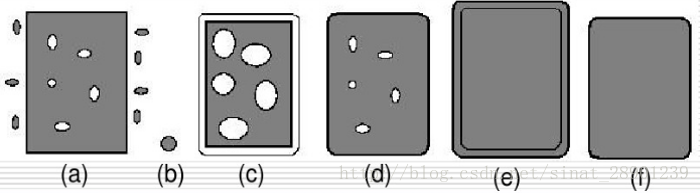
噪声滤除: {[(A⊝B)⊕B]⊕B}⊝B=(A∘ B)·B
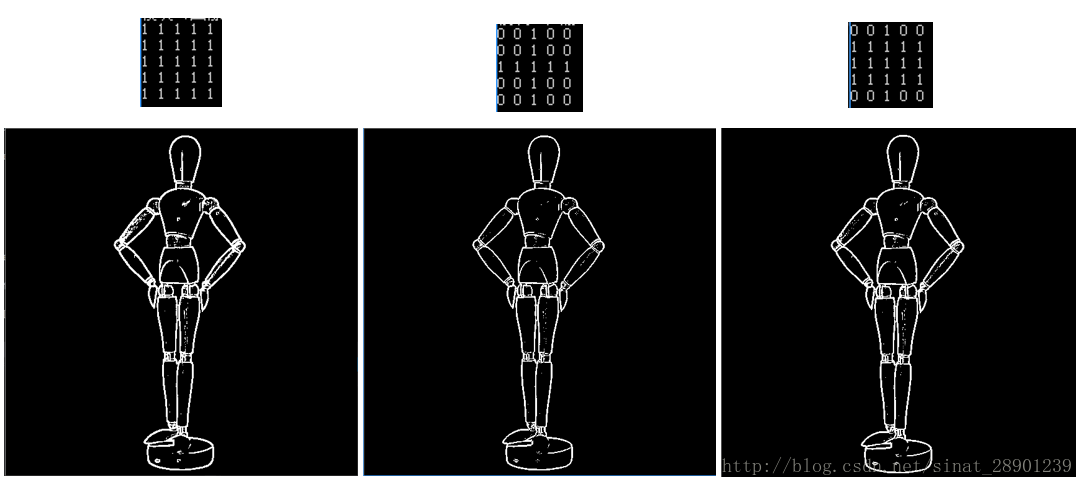
在上图中,(a)是原图像,外部有噪声块,内部有噪声孔,(b)为结构元素,尺寸大于所有噪声块和噪声孔,(c)是用(b)去腐蚀(a)的结果,可见,外部的噪声块被去除;之后用(b)去膨胀(c)两次,得到(e),此时已经去除了内部的噪声孔,在进行一次腐蚀操作,得到和原图一样大小的去噪图像(f)。实验对比:
3.1图像格式对比:
参数设置:不进行噪声滤除,腐蚀2次,十字核,尺寸3*3
二值图像;
灰度图像:
RGB图像:
3.2核样式对比:
参数设置:RGB图像,不进行”噪声滤除”,腐蚀1次,尺寸5*5,二值化阈值100.
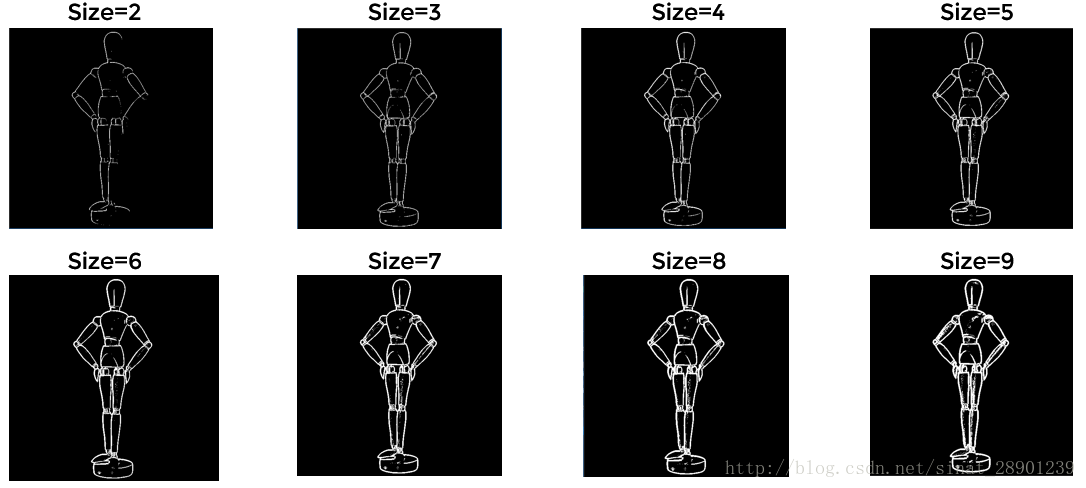
3.3核尺寸对比:
参数设置:RGB图像,不进行”噪声滤除”,十字型核样式,腐蚀1次,二值化阈值100
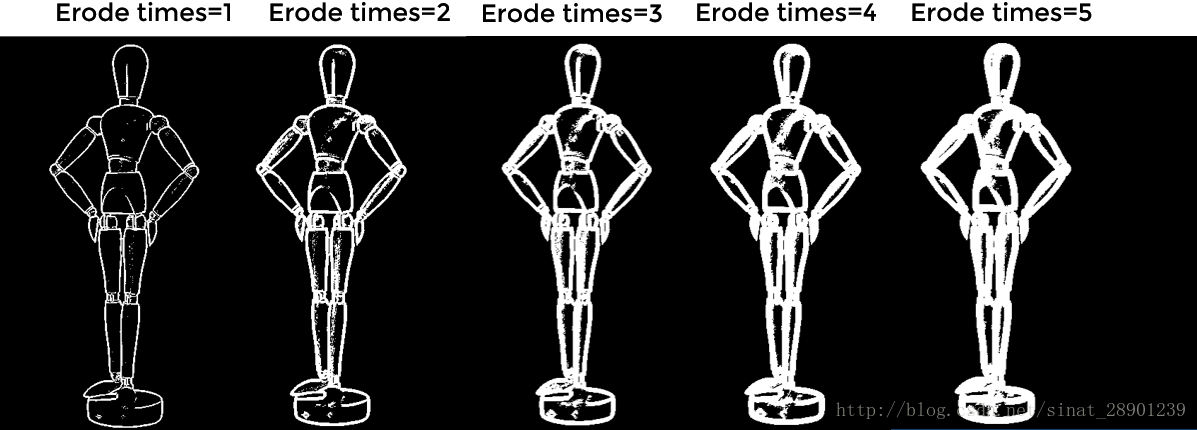
3.4腐蚀次数对比:
参数设置:RGB图像,不进行”噪声滤除”,十字型核样式,尺寸5*5,二值化阈值100
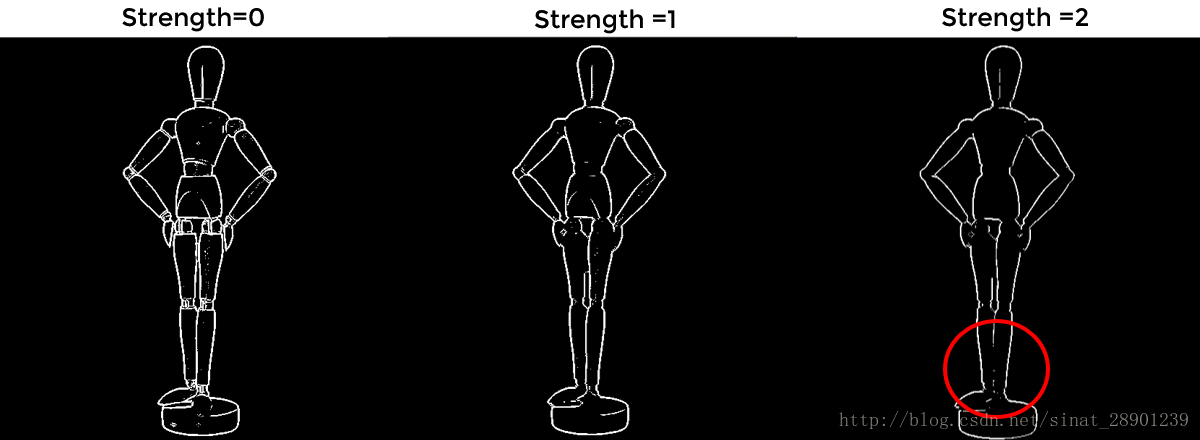
3.5噪声滤除强度对比:
参数设置: RGB图像,十字型,腐蚀1次,核样式,尺寸5*5,二值化阈值100
3.6对比分析:
图像格式:RGB格式提取轮廓效果较好,灰度和二值图像信息相对有限。
核样式:十字型效果最佳,矩形和圆形容易造成噪点。
核尺寸:尺寸过小,轮廓提取不完整;尺寸过大,容易出现噪点。
腐蚀次数:腐蚀次数过小,轮廓提取不完整;次数过多,容易出现噪点,且轮廓边缘强度过大。
噪声滤除:影响把图像轮廓深度信息提取。(标红区域)代码:




morphology.h
#pragma once
#include "stdafx.h"
#include "opencv2/highgui/highgui.hpp"
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
Mat getKernelMatrix(int shape, Size ksize);//内核矩阵生成
void erodeFun(Mat &src, Mat &dst, Mat kernel, int iterations);//腐蚀操作
void dilateFun(Mat &src, Mat &dst, Mat kernel, int iterations);//膨胀操作
void openFun(Mat &src, Mat &dst, Mat kernel, int iterations);//开操作
void closeFun(Mat &src, Mat &dst, Mat kernel, int iterations);//闭操作
void subtractFun(Mat src, Mat erode_ouput, Mat &externalGradientImg, int threshold);//减操作morphology.cpp
#include "stdafx.h"
#include "morphology.h"
/*
函数: 获取内核矩阵
参数: shape内核样式(矩形: MORPH_RECT 交叉形十字: MORPH_CROSS 椭圆形: MORPH_ELLIPSE)
ksize内核大小
*/
Mat getKernelMatrix(int shape, Size ksize) {
Point center((int)ksize.width / 2, (int)ksize.height / 2);
int i, j;
int r = 0, c = 0;//圆参数
double helperR = 0;//圆参数
if (ksize == Size(1, 1))//单位内核都是矩形内核
shape = MORPH_RECT;
if (shape == MORPH_ELLIPSE)//椭圆形内核参数处理
{
r = ksize.height / 2;
c = ksize.width / 2;
helperR = r ? 1. / ((double)r*r) : 0;
}
Mat kernel(ksize, CV_8U);
//行遍历
for (i = 0; i < ksize.height; i++)
{
uchar* ptr = kernel.data + i*kernel.step;
int j1 = 0, j2 = 0;
//确定每一行1的区间[j1,j2]
if (shape == MORPH_RECT || (shape == MORPH_CROSS && i == center.y))
j2 = ksize.width;
else if (shape == MORPH_CROSS)
j1 = center.x, j2 = j1 + 1;
else
{
int dy = i - r;
if (std::abs(dy) <= r)//圆
{
int dx = saturate_cast<int>(c*sqrt((r*r - dy*dy)*helperR));
j1 = std::max(c - dx, 0);
j2 = std::min(c + dx + 1, ksize.width);
}
}
//赋值操作
for (j = 0; j < j1; j++)
ptr[j] = 0;
for (; j < j2; j++)
ptr[j] = 1;
for (; j < ksize.width; j++)
ptr[j] = 0;
}
return kernel;
}
/*
函数: 腐蚀操作
参数: src:原图像
dst:结果图像
kernel:核矩阵
iterations:操作次数
*/
void erodeFun(Mat &src, Mat &dst, Mat kernel, int iterations) {
//参数判定
if (iterations == 0) { return; }
if (kernel.cols == 1 && kernel.rows == 1){ return; }
Mat_<uchar> kernelMatrix = kernel;
int HALFKERLEN = kernelMatrix.cols / 2;//正方形
int KERLEN = kernelMatrix.cols;
Mat pre = src.clone();
Mat next = src.clone();
for (int iterator = 0; iterator < iterations; iterator++) {
//腐蚀次数
for (int i = 0; i<pre.rows; i++)
{
for (int j = 0; j < pre.cols; j++)
{
//处理每一个像素值的每一个通道
Vec3b minPixel = pre.at<Vec3b>(i, j);
//遍历核
for (int ki = 0; ki < KERLEN; ki++) {
for (int kj = 0; kj < KERLEN; kj++) {
if ((int)kernelMatrix.at<uchar>(ki, kj) == 1) {
//核为1,处理
int pi = ki + i - HALFKERLEN;
int pj = kj + j - HALFKERLEN;
if (pi >= 0 && pi < pre.rows && pj >= 0 && pj < pre.cols)//防止超限
{
if (pre.at<Vec3b>(pi, pj)[0] < minPixel[0]) {
minPixel[0] = pre.at<Vec3b>(pi, pj)[0];
}
if (pre.at<Vec3b>(pi, pj)[1] < minPixel[1]) {
minPixel[1] = pre.at<Vec3b>(pi, pj)[1];
}
if (pre.at<Vec3b>(pi, pj)[2] < minPixel[2]) {
minPixel[2] = pre.at<Vec3b>(pi, pj)[2];
}
}
}
}
}
next.at<Vec3b>(i, j) = minPixel;
}
}
pre = next.clone();//更新
}
dst = next.clone();//更新
}
/*
函数: 膨胀操作
参数: src:原图像
dst:结果图像
kernel:核矩阵
iterations:操作次数
*/
void dilateFun(Mat &src, Mat &dst, Mat kernel, int iterations) {
Mat_<uchar> kernelMatrix = kernel;
int HALFKERLEN = kernelMatrix.cols / 2;//正方形
int KERLEN = kernelMatrix.cols;
Mat pre = src.clone();
Mat next = src.clone();
for (int iterator = 0; iterator < iterations; iterator++) {
//膨胀次数
for (int i = 0; i<pre.rows; i++)
{
for (int j = 0; j < pre.cols; j++)
{
//处理每一个像素值的每一个通道
Vec3b maxPixel = pre.at<Vec3b>(i, j);
//遍历核
for (int ki = 0; ki < KERLEN; ki++) {
for (int kj = 0; kj < KERLEN; kj++) {
if ((int)kernelMatrix.at<uchar>(ki, kj) == 1) {
//核为1,处理
int pi = ki + i - HALFKERLEN;
int pj = kj + j - HALFKERLEN;
if (pi >= 0 && pi < pre.rows && pj >= 0 && pj < pre.cols)//不超限
{
if (pre.at<Vec3b>(pi, pj)[0] > maxPixel[0]) {
maxPixel[0] = pre.at<Vec3b>(pi, pj)[0];
}
if (pre.at<Vec3b>(pi, pj)[1] > maxPixel[1]) {
maxPixel[1] = pre.at<Vec3b>(pi, pj)[1];
}
if (pre.at<Vec3b>(pi, pj)[2] > maxPixel[2]) {
maxPixel[2] = pre.at<Vec3b>(pi, pj)[2];
}
}
}
}
}
next.at<Vec3b>(i, j) = maxPixel;
}
}
pre = next.clone();
}
dst = next.clone();
}
/*
函数: 开操作
参数: src:原图像
dst:结果图像
kernel:核矩阵
iterations:操作次数
*/
void openFun(Mat &src, Mat &dst, Mat kernel, int iterations) {
Mat erode = src.clone();
erodeFun(src, erode, kernel, iterations); //腐蚀
dilateFun(erode, dst, kernel, iterations);//膨胀
}
/*
函数: 闭操作
参数: src:原图像
dst:结果图像
kernel:核矩阵
iterations:操作次数
*/
void closeFun(Mat &src, Mat &dst, Mat kernel, int iterations) {
if (iterations == 0) { return; }
Mat dilate = src.clone();
dilateFun(src, dilate, kernel, iterations); //腐蚀
erodeFun(dilate, dst, kernel, iterations);//膨胀
}
void subtractFun(Mat src, Mat erode_ouput, Mat &externalGradientImg, int threshold) {
for (int i = 0; i < src.rows; i++) {
for (int j = 0; j < src.cols; j++) {
/*cout << (int)src.at<Vec3b>(i, j)[0] << " ";
cout << (int)src.at<Vec3b>(i, j)[1] << " ";
cout << (int)src.at<Vec3b>(i, j)[2] << " " << endl;*/
if (src.at<Vec3b>(i, j)[0] - erode_ouput.at<Vec3b>(i, j)[0] > threshold ||
src.at<Vec3b>(i, j)[1] - erode_ouput.at<Vec3b>(i, j)[1] > threshold ||
src.at<Vec3b>(i, j)[2] - erode_ouput.at<Vec3b>(i, j)[2] > threshold) {
externalGradientImg.at<Vec3b>(i, j)[0] = 255;
externalGradientImg.at<Vec3b>(i, j)[1] = 255;
externalGradientImg.at<Vec3b>(i, j)[2] = 255;
}
else {
externalGradientImg.at<Vec3b>(i, j)[0] = 0;
externalGradientImg.at<Vec3b>(i, j)[1] = 0;
externalGradientImg.at<Vec3b>(i, j)[2] = 0;
}
}
}
}main.cpp
#include "stdafx.h"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <stdlib.h>
#include <stdio.h>
#include "morphology.h"
using namespace cv;
/// 全局变量
Mat src, outLineResult;
int kernel_type = 0;//核样式
int const kernel_type_max = 2;
int kernel_size = 0;//核尺寸
int const kernel_size_max= 9;
int erode_times = 0;//腐蚀次数
int const erode_times_max = 5;
int removedetails_times = 0;//去除细节次数
int const removedetails_times_max = 2;
void outLine(int, void*);
int main()
{
src = imread("test.png");
if (!src.data)
{
return -1;
}
/// 创建显示窗口
namedWindow("Erosion Demo", CV_WINDOW_AUTOSIZE);
namedWindow("Dilation Demo", CV_WINDOW_AUTOSIZE);
cvMoveWindow("Dilation Demo", src.cols, 0);
createTrackbar("核样式:", "Erosion Demo",
&kernel_type, kernel_type_max,
outLine);
createTrackbar("核尺寸:", "Erosion Demo",
&kernel_size, kernel_size_max,
outLine);
createTrackbar("腐蚀次数:", "Erosion Demo",
&erode_times, erode_times_max,
outLine);
createTrackbar("去噪强度:", "Erosion Demo",
&removedetails_times, removedetails_times_max,
outLine);
/// Default start
outLine(0, 0);
waitKey(0);
return 0;
}
/** @function Erosion */
void outLine(int, void*)
{
int type;
string tpyeStr = "";
string removeDetailType = "";
if (kernel_type == 0) { type = MORPH_RECT; tpyeStr = "正方形"; }
else if (kernel_type == 1) { type = MORPH_CROSS; tpyeStr = "十字形"; }
else if (kernel_type == 2) { type = MORPH_ELLIPSE; tpyeStr = "圆形"; }
//输出
cout << endl<<"----------------------" << endl;
cout << " 核样式:"<< tpyeStr;
cout << " 核尺寸:" << kernel_size;
cout << " 轮廓强度:" << erode_times;
cout << " 细节去除样式:" << removeDetailType;
cout << " 细节去除强度:" << removedetails_times;
Mat element = getKernelMatrix(type, Size(kernel_size, kernel_size));
Mat erode_ouput,closeResult,openResult;
erode_ouput = src.clone();
outLineResult = src.clone();
openResult = src.clone();
closeResult = src.clone();
//噪声滤除
if (removedetails_times == 1) {
closeFun(src, closeResult, element, 1);
openFun(closeResult, openResult, element, 1);
}
else if (removedetails_times == 2) {
openFun(src, openResult, element, 1);//去噪
closeFun(openResult, closeResult, element, 1);
openFun(closeResult, openResult, element, 1);//去噪
closeFun(openResult, closeResult, element, 1);
}
// 腐蚀操作
erodeFun(closeResult, erode_ouput, element , erode_times);
//减操作
subtractFun(closeResult, erode_ouput, outLineResult,50);
imshow("Erosion Demo", outLineResult);
cout << " 完成";
}
人脸边缘轮廓提取(下巴、嘴唇)
使用上述方法对人脸进行轮廓提取,调整参数,得到相对最佳的效果,但是会出现下巴和嘴唇提取失败的现象,所以针对这些边缘信息,要自行提取。
流程分析:
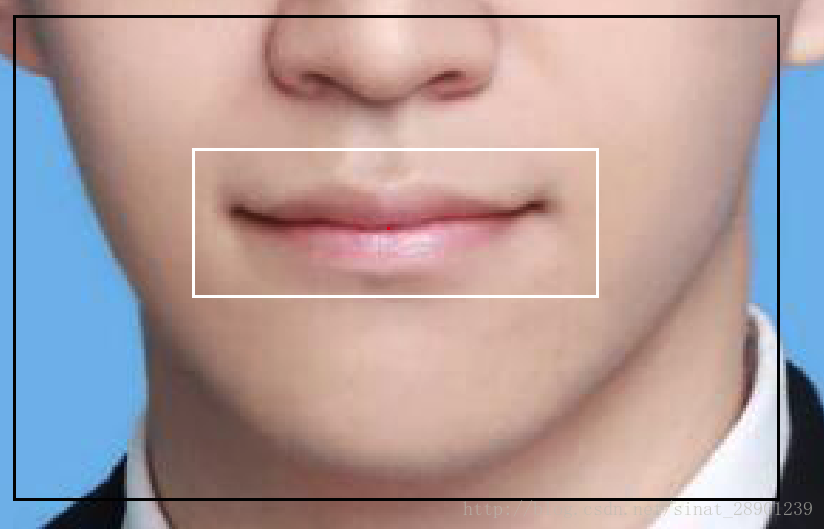
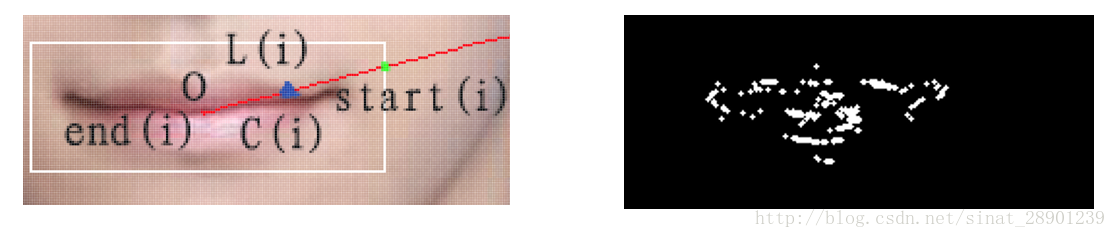
嘴唇定位&内外轮廓及中心点确认:
使用人脸特征提取和模式匹配方法去定位嘴唇并确认中心点以及内外轮廓。
自适应算法确定轮廓点
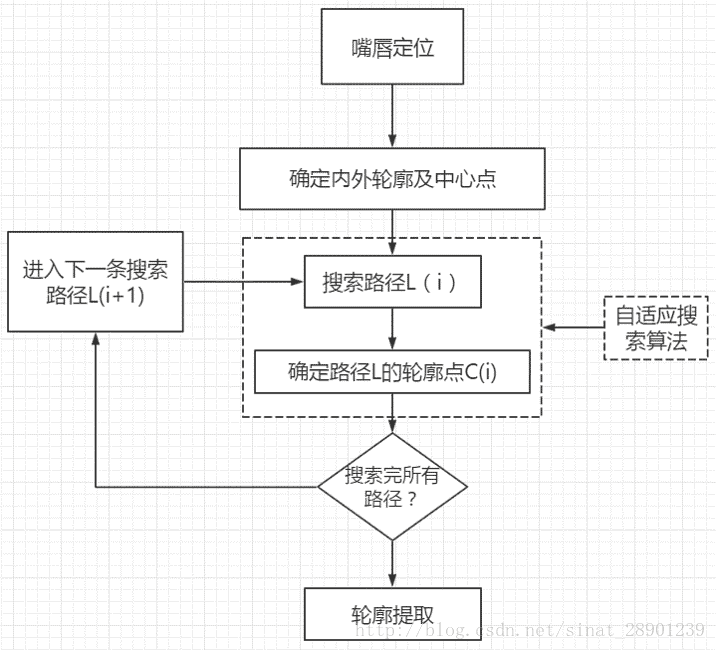
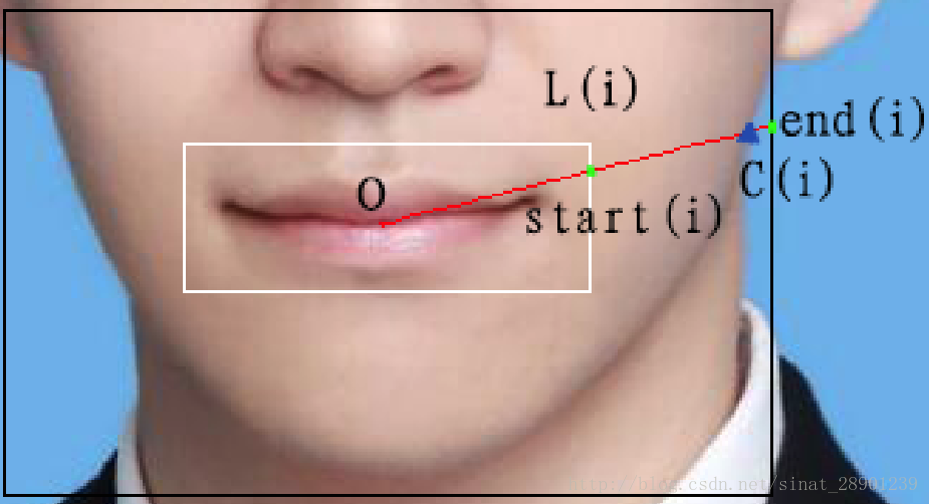
Step1:确定路径L(i)的起始点start(i)和终止点end(i) 。
Step2:从start(i)向end(i)做步长为1的像素点搜索,每次搜索计算像素梯度值,当梯度值大于设定的阈值时,停止该次搜索,并保存该点为轮廓点。
Step3:确定是否完成搜索:如完成,进行下一步轮廓提取。如果未完成,更新搜索路径L(i+1),转至Step1.
提取结果:
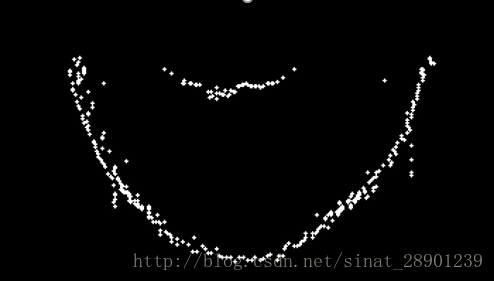
改变搜索方向,即可对嘴唇进行轮廓点的提取:
智能推荐
第三十六篇、基于Arduino uno,获取红外寻迹传感器的原始值——结果导向_怎么检测红外寻迹模块返回值-程序员宅基地
文章浏览阅读385次。基于Arduino uno,获取红外寻迹传感器的原始值_怎么检测红外寻迹模块返回值
基于单片机的无线投票显示系统设计-程序员宅基地
文章浏览阅读494次,点赞5次,收藏9次。单片机(Microcontroller)是一种集成了微处理器核心、存储器、输入/输出接口和定时器等功能模块的集成电路芯片,具有体积小、功耗低、性价比高等特点,被广泛应用于各个领域。单片机的发展历史可以追溯到20世纪70年代,当时的单片机功能有限,主要用于简单的控制任务。
生成对抗网络GAN_生成对抗网络 python代码-程序员宅基地
文章浏览阅读412次。https://zhuanlan.zhihu.com/p/54096381_生成对抗网络 python代码
html——网页上添加表格_怎样在网站中添加表格别人可以下载-程序员宅基地
文章浏览阅读5.2k次,点赞7次,收藏18次。有时候我们需要在网页上展示一些数据,如某公司想在网页上展示公司的库存清单。如下表:想在网页上展示上述表格效果可以使用以下代码:创建表格的四个元素:table、tbody、tr、th、td1、…:整个表格以标记开始、标记结束。2、…:当表格内容非常多时,表格会下载一点显示一点,但如果加上标签后,这个表格就要等表格内容全部下载完才会显示。如右侧代码编辑器中的代码。3、…_怎样在网站中添加表格别人可以下载
《Qt MOOC系列教程》第五章第三节:创建新的QML类型_qmlregisteruncreatabletype-程序员宅基地
文章浏览阅读770次。到目前为止,我们已经讨论了如何将对象实例公开给QML上下文。有时我们还希望在QML中可以使用注册类本身。注册允许将类当作QML中的数据类型来使用。此外,注册还可以提供其他功能,比如允许在QML中将类用作可实例化的QML对象类型,或者允许在QML中导入和使用类的单例实例。通常我们使用Q_OBJECT宏注册从QObject派生的类,也可以用Q_GADGET宏声明一个比QObject“更轻”的版本。在这些更轻的类中,我们可以访问它们的属性、枚举和可调用的方法,但不能使用信号槽系统,我们稍后会进行介绍。1. 注_qmlregisteruncreatabletype
头文件与命名空间的关系_c#中命名空间和c语言中头文件之间的关系-程序员宅基地
文章浏览阅读2.1k次,点赞7次,收藏15次。头文件与命名空间的关系 Q:有些书说有些头文件不在std里是什么意思?std里包含些什么?为什么不用std就不能使用cout?头文件中声明的东西为什么在使用的时候需要先using namespace std;一下?如果我不用#include和其他头文件。只用using namespace std 的话,是不能用cout的。这说明cout是在iostream里声明_c#中命名空间和c语言中头文件之间的关系
随便推点
python实现矩阵乘法(实现文件读写操作)_python 读取csv矩阵乘法-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏8次。注释dtype=np.int代表导入数据的格式为整数delimiter=’,'代表原始数据的存储格式为以‘,’为间隔原始文件中以‘#’开头的行代表被注释,不会被np.loadtxt读取通过[[0] * b for i in range(a)]的方式初始化一个x[a][b]的二维数组np.savetxt()函数可以用来保存数据,第一个参数为保存数据的路径,其中C是自定义的文件名,如果该文..._python 读取csv矩阵乘法
《军团要塞2》绘画渲染_军团要塞画师-程序员宅基地
文章浏览阅读1.4k次。军团要塞2绘画渲染(a)美术概念 (b)游戏内玩家看到的角色摘要在《军团要塞2》中我们提出了一整套美术方案和新的实时渲染技术,这种技术能实现出一种独一无二的渲染风格。《军团要塞2》由美术和程序基于20世纪初时商业插画中的传统风格合作完成。在这篇论文中,我们会结合美术方向与技术选择,来讨论如何支持美术目标和玩法限制。除了实现一种有冲击力的风格外,我们也设计了边缘光照和亮度与色调变化的着色器技..._军团要塞画师
【数字图像处理实验二】:RGB图3个通道的提取、RGB图转灰度图、图片反转、图片亮度调整、直方图显示_jupter rgb灰度直方图提取-程序员宅基地
文章浏览阅读9.6k次,点赞8次,收藏65次。这里介绍:RGB图3个通道的提取、RGB图转灰度图、图片反转、图片亮度调整具体操作,需导入的库如下:原图如下:结果如下,从左到右分别是:Red,Green,Blue这里借助skimage库中的exposure函数来进行图像亮度的调整结果如下:........._jupter rgb灰度直方图提取
2023年地级、省级、县级、国界、九段线的shp数据_九段线shp数据-程序员宅基地
文章浏览阅读931次。2023年地级、省级、县级、国界、九段线的shp数据_九段线shp数据
python高校本科生学习成长记录系统的设计与实现flask-django-php-nodejs-程序员宅基地
文章浏览阅读797次,点赞16次,收藏19次。二十一世纪我们的社会进入了信息时代,信息管理系统的建立,大大提高了人们信息化水平。传统的管理方式对时间、地点的限制太多,而在线管理系统刚好能满足这些需求,在线管理系统突破了传统管理方式的局限性。于是本文针对这一需求设计并实现了一个基于django高校本科生学习成长记录系统,为了简捷并有效的解决学习各方面的问题。
redis实现分布式session共享_redis分布式session共享-程序员宅基地
文章浏览阅读7.7k次。为什么要共享session?我们使用单台Tomcat的时候不会有共享sesssion的疑虑,只要使用Tomcat的默认配置即可,session即可存储在Tomcat上。但是随着业务的扩大,增加Tomcat节点构成Tomcat集群大势所趋,分布式带来了增加更大规模并发请求的优势,但是也随之到来了一个问题,每个Tomcat只存储来访问自己的请求产生的session,如果Tomcat-A已经为客..._redis分布式session共享