图算法——求最短路径(Dijkstra算法)-程序员宅基地
目录
求图的最短路径在实际生活中有许多应用,比如说在你在一个景区的某个景点,参观完后,要怎么走最少的路程到你想参观的下个景点,这就利用到了求图最短路径的算法。求图的最短路径有很多算法,这里介绍一种迪杰斯特拉(Dijkstra)算法来求图的最短路径。
在介绍算法前,需要掌握一点图的基本知识,比如说什么是路径,什么是路径长度等。如果对这些不了解的话,建议先了解一下。
这是我写的一篇博客,对图的一些基本知识的简介——图的一些基本知识。
一、什么是最短路径
在网图和非网图中,最短路径的含义是不同的。由于非网图没有边上的权值,所谓最短路径,其实指的就是两个顶点之间经过的边数最少的路劲(即可以理解为把每一条边的权值看作是1)。
对于网图来说,最短路径,是指两顶点之间经过的边上的权值之和最少的路径,并且我们称路径上的第一个顶点是源点,最后一个顶点是终点。
求带权有向图G的最短路径问题一般可分为两类:一是单源最短路径,即求图中某一个顶点到其它顶点的最短路径,可以通过经典的 Dijkstra(迪杰斯特拉)算法求解(即是我要介绍的算法);二是求每对顶点间的最短路径,可通过Floyd(弗洛伊德)算法来求解。
二、迪杰斯特拉(Dijkstra)算法
Dijkstra算法算法思路是设置一个集合S记录已求得的最短路径的顶点,初始时把源点V0(图中的某个顶点)放入S,集合S每并入一个新顶点 V,都要修改源点V0到集合 V-S 中顶点当前的最短路径长度值(这里可能大家会很懵,但等会我会用一个例子来解说)。
在构造过程中需要两个辅助数组:
- dist[ ] :记录从源点V0到其他各顶点当前的最短路径长度,它的初态为:若从 V0 到 V
有直接路径(即V0 和 V
- path[ ]:path[ i ]表示从源点到顶点 i 之间的最短路径的前驱结点。在算法结束时,可以根据其值追溯到源点 V0 到 V
假设从顶点 V0 = 0出发,邻接矩阵Edge表示带权无向图,Edge[i][j]表示无向边 (i, j)的权值,若不存在无向边(i, j),则Edge[i][]为 ∞。
Dijkstra算法步骤如下:
1)初始化:集合S初始化为{0},dist[ ] 的初始值dist[i] = Edge[0][i],path[ ]的初始值path[i] = -1,i = 1,2,...,n-1。
2)从顶点集合 V - S中选出V,满足dist[j] = Min{dist[i] | V
V - S},V
就是当前求的一条从 V0 出发的最短路径的终点,令S = S
{j}。
3)修改从V0出发到集合 V - S上任一顶点 V 可达的最短路径长度:若
dist[j] + Edge[j][k] < dist[k],则更新 dist[k] = dist[j] + Edge[j][k],并修改path[k] = j(即修改顶点V的最短路径的前驱结点 ) 。
4)重复 2)~ 3)操作共 n-1 次,直到所有的顶点都包含在 S 中。
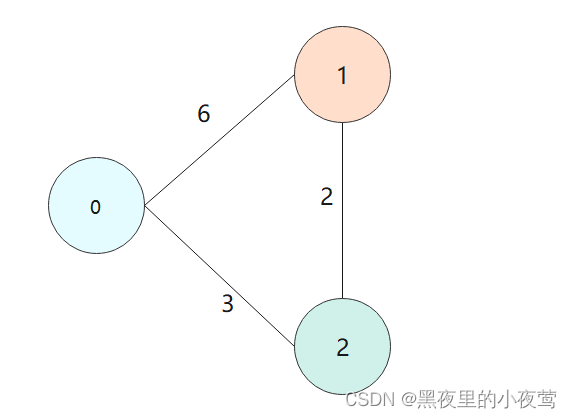
解释下步骤3),每当一个顶点加入S后,可能需要修改源点V0 到集合 V-S中的可达顶点当前的最短路径长度。下面举一个例子。如下图所示,源点为V0,初始时S = {V0},dist[1] = 6, dist[2] = 3,当V
并入集合S后,dist[1] 需要更新为 5(其比6小,即说明两点之间不是直线最短,要根据两点之间路径的权值之和来看)。
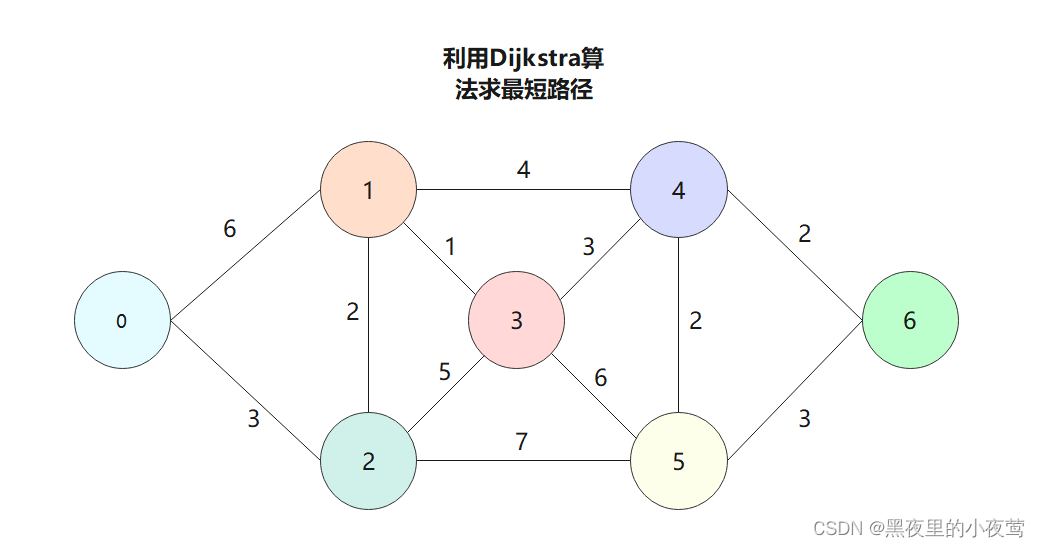
下面来讲解利用Dijkstra算法来求下图中的顶点 0 出发至其余顶点的最短路径的过程。
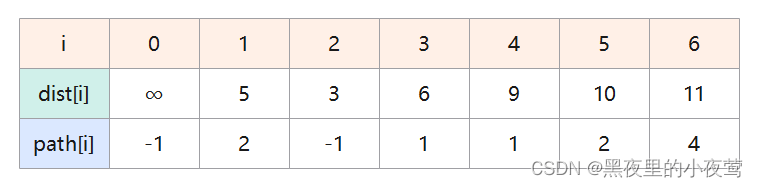
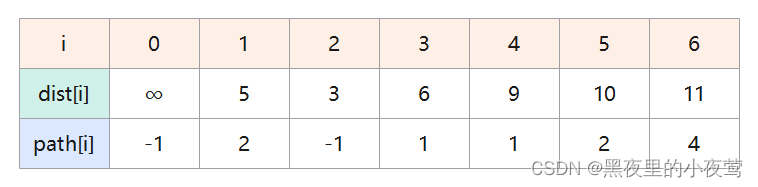
 初始化:集合S初始化为{V
初始化:集合S初始化为{V},V
可达V
和V
,其余顶点不可达,因此dist[]数组和path[]数组的设置如下:

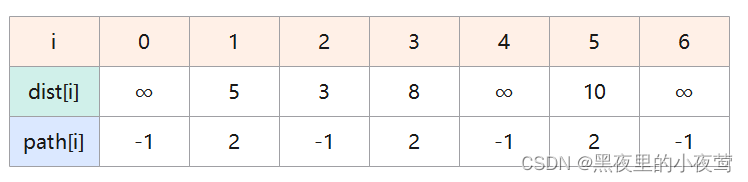
第一轮:选出最小dist[2],将顶点 V 并入集合S,此时已找到 V
到 V
的最短路径,S = {V
,V
}。当 V
加入到S后,从V
到集合V-S中可到达顶点的最短路径长度可能会产生变化。因此需要更新dist[]数组。V
可达V
,因V
-> V
-> V
的距离 5 比 dist[1] = 6小,更新dist[1] = 5,并修改 path[1] = 2(即V
的最短路径的前驱为V
);V
可达 V
,V
-> V
- > V
的距离 8 比 dist[3] = ∞ 小,更新dist[3] = 8,path[3] = 2;V
可达V
,V
-> V
-> V
的距离 10 小于 dist[5] = ∞,更新dist[5] = 10,path[5] = 2。V
再无到达其余的顶点的路径,结束这一轮,此时dist[]数组和path[]数组如下:
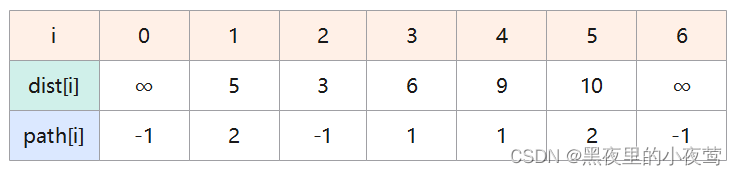
 第二轮:选出最小值dist[1],将顶点 V
第二轮:选出最小值dist[1],将顶点 V 并入集合S,此时已找到 V
到 V
的最短路径,S = {V
,V
,V
}。然后更新dist[]数组和path[]数组,V
可达V
,V
-> V
-> V
-> V
的距离 6 小于 dist [3] = 8 ,更新 dist[3] = 6,path[3] = 1;V
可达 V
,但V
已经在集合S中,故不进行操作;V
可达 V
, V
-> V
-> V
-> V
的距离 9 小于 dist[4] = ∞,更新dist[4] = 9,path[4] = 1。V
已无到达其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
第三轮: 选出最小值 dist[3],将顶点 V 并入集合 S,此时已找到 V
到 V
的最短路径,S = { V
,V
,V
,V
}。接着更新dist[]数组和path[]数组,V
可到达 V
, V
-> V
-> V
-> V
-> V
的距离为 9 等于 dist[4] = 9,我们不做更新;V
可到达 V
, V
-> V
-> V
-> V
-> V
的距离为 12 大于 dist[5] = 10,不做更新。 V
再无达到其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
第四轮:选出最小值 dist[4],将顶点 V 并入集合 S,此时已找到 V
到 V
的最短路径,S = { V
,V
,V
,V
,V
}。继续更新dist[]数组和path[]数组,V
可到 V
, V
-> V
-> V
-> V
-> V
的距离 11 小于 dist[5] = 10,故不进行更新操作;V
可到 V
, V
-> V
-> V
-> V
-> V
的距离 11 小于 dist[6] = ∞,更新 dist[6] = 11,path[6] = 4。V
再无达到其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
 第五轮: 选出最小值 dist[5],将顶点 V
第五轮: 选出最小值 dist[5],将顶点 V 并入集合S,此时已找到 V
到 V
的最短路径,S = { V
,V
,V
,V
,V
,V
}。然后ist[]数组和path[]数组,V
可到 V
, V
-> V
-> V
-> V
的最短路径 13 大于 dist[6],故不进行更新操作。V
再无达到其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
第六轮:选出最小值 dist[6],将顶点 V 并入集合,此时全部顶点都已包含在S中,结束算法。
整个算法每一轮的结果如下: 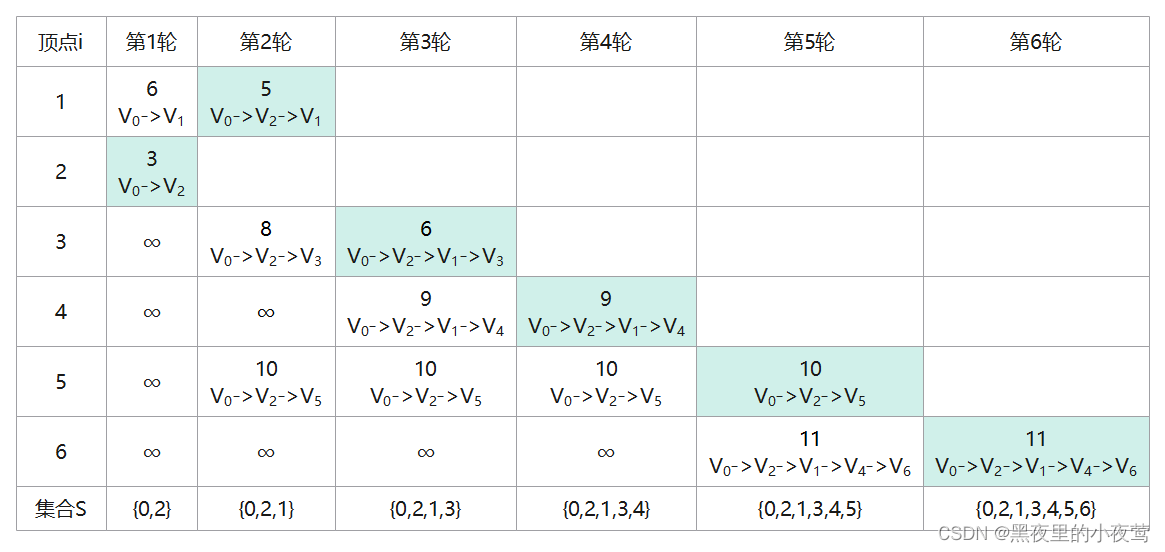
总结:Dijkstra算法就是最开始选离源点V
最近的点,然后选好点后,再从选好点的看其邻接点的距离dist[]是否减小,减小就修改dist[]和path[];否则就不进行修改操作。Dijkstra算法基于贪心策略,用邻接矩阵表示图时,来使用Dijkstra算法,其时间复杂度为O(n*n)。当边上带有负权值时,Dijkstra算法并不适用。
使用dist[]数组和path[]数组,求最短路径,这里介绍一个例子,其它顶点依次类推。
V
的最短路径,先利用dist[6] = 11 得出 V
,再由 path[4] = 1,表示 V
, path[1] = 2,表示 V
三、应用Dijkstra算法
理解上面的Dijkstra算法求最短路径的过程,那么下面的应用Dijkstra算法的程序就很容易理解。此程序分三大块,在程序末尾我会来粗略介绍下。
使用此程序需输入以下内容创建图G:
第一步:7 12
第二步:0123456
第三步:依次输入下面的内容,输入完一行就按下换行键
0 1 6
0 2 3
1 2 2
1 3 1
1 4 4
2 3 5
2 5 7
3 4 3
3 5 6
4 5 2
4 6 2
5 6 3
上面输入完后,即可创建下面的图G: 
/*
使用此程序需输入以下内容创建图G:
第一步:7 12
第二步:0123456
第三步:依次输入下面的内容,输入完一行就按下换行键
0 1 6
0 2 3
1 2 2
1 3 1
1 4 4
2 3 5
2 5 7
3 4 3
3 5 6
4 5 2
4 6 2
5 6 3
*/
#include <stdio.h>
#include <stdbool.h>
#include <stdlib.h>
#define MaxVerterNum 100 // 顶点数目的最大值
#define INFINITY 65535 // 用65535代表 ∞
typedef char VertexType; // 顶点的数据类型
typedef int EdgeType; // 带权图中边上权值的数据类型
/* 邻接矩阵的存储结构 */
typedef struct
{
VertexType Vexs[MaxVerterNum]; // 顶点表
EdgeType Edge[MaxVerterNum][MaxVerterNum]; // 邻接矩阵
int vexNum, arcNum; // 图当前顶点数和弧数
}MGraph;
/*清除缓冲区的换行符*/
void Clean(void)
{
while (getchar() != '\n')
continue;
}
/* 建立无向网图的邻接矩阵表示 */
void CreateMGraph(MGraph* G);
/* 迪杰斯特拉(Dijkstra) 算法*/
typedef int Patharc[MaxVerterNum]; // 用于存储最短路径下标的数组,从源点Vi到顶点Vj之间的最短路径的前驱
typedef int ShortPathTable[MaxVerterNum]; // 用于存储到各点最短路径的权值和
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc path, ShortPathTable D);
/* 输出最短路径 */
/* Dijkstra算法的结果输出 */
void Show_ShortestPath_Dijkstra(Patharc path, ShortPathTable dist, MGraph G, int v0);
int main(void)
{
MGraph G;
Patharc path;
ShortPathTable dist;
CreateMGraph(&G);
for (int i = 0; i < G.vexNum; i++) // 输出各点到各点的最短路径序列,不再局限于一个顶点
{
ShortestPath_Dijkstra(G, i, path, dist);
Show_ShortestPath_Dijkstra(path, dist, G, i);
}
return 0;
}
/* 建立无向网图的邻接矩阵表示 */
void CreateMGraph(MGraph* G)
{
int i, j, k, w;
printf("请输入顶点数和边数:");
scanf("%d %d", &G->vexNum, &G->arcNum); // 获取无向图顶点数和边数
printf("请输入全部顶点信息:\n");
Clean(); // 将换行符去除
for (i = 0; i < G->vexNum; i++) // 读取顶点信息,建立顶点表
scanf("%c", &G->Vexs[i]);
for (i = 0; i < G->vexNum; i++)
for (j = 0; j < G->vexNum; j++)
G->Edge[i][j] = INFINITY; // 邻接矩阵初始化
for (k = 0; k < G->arcNum; k++) // 读入arcNum条边,建立邻接矩阵
{
printf("请输入边(Vi, Vj)上的下标i,下标j和权w:\n");
scanf("%d %d %d", &i, &j, &w); // 获取边和权
G->Edge[i][j] = w; // 无向图矩阵对称
G->Edge[j][i] = G->Edge[i][j];
}
return;
}
/* 迪杰斯特拉(Dijkstra) 算法*/
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc path, ShortPathTable dist)
{
int v, w, k, min;
int final[MaxVerterNum]; /* final[w] = 1表示求得顶点 v0 至 vw的最短路 径,即已访问过顶点vw*/
for (v = 0; v < G.vexNum; v++)
{
final[v] = 0; // 全部顶点初始化为未知最短路径状态
dist[v] = G.Edge[v0][v]; // 将与v0点有连线的顶点加上权值
path[v] = -1; // 初始化路劲数组p为-1
}
dist[v0] = 0; // v0至v0路径为0
final[v0] = 1; // v0至v0不需要路径
/* 开始主循环,每次求得v0到某个顶点v的最短路径*/
for (v = 1; v < G.vexNum; v++)
{
min = INFINITY; // 当前所知离v0顶点的最近距离
for (w = 0; w < G.vexNum; w++) // 寻找离v0最近的顶点
{
if (!final[w] && dist[w] < min)
{
k = w;
min = dist[w]; // w顶点离v0顶点更近
}
}
final[k] = 1; // 将目前找到的最近的顶点置为1
for (w = 0; w < G.vexNum; w++) // 修正当前最短路径及距离
{
/* 如果经过v顶点的路径比现在这条路径的长度短的话 */
if (!final[w] && (min + G.Edge[k][w] < dist[w]))
{
/* 找到了更短的路径,修改D[w]和P[w] */
dist[w] = min + G.Edge[k][w]; // 修改当前路径长度
path[w] = k;
}
}
}
}
/* 输出最短路径 */
/* Dijkstra算法的结果输出 */
void Show_ShortestPath_Dijkstra(Patharc path, ShortPathTable dist, MGraph G, int v)
{
int w, k;
printf("V%d到各点的最短路径如下:\n", v);
for (w = 0; w < G.vexNum; w++)
{
if (w != v)
{
printf("V%d-V%d weight: %d", v, w, dist[w]);
k = path[w];
printf(" path: V%d", w);
while (k != -1) // 当 k = -1 ,结束循环并输出源点
{
printf(" <- V%d", k);
k = path[k];
}
printf(" <- V%d\n", v);
}
}
printf("\n");
}(1) Dijkstra算法函数分析
/* 迪杰斯特拉(Dijkstra) 算法*/
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc path, ShortPathTable dist)
{
int v, w, k, min;
int final[MaxVerterNum]; // final[w] = 1表示求得顶点 v0 至 vw的最短路径,即已访问过顶点vw
for (v = 0; v < G.vexNum; v++)
{
final[v] = 0; // 全部顶点初始化为未知最短路径状态
dist[v] = G.Edge[v0][v]; // 将与v0点有连线的顶点加上权值
path[v] = -1; // 初始化路劲数组p为-1
}
dist[v0] = 0; // v0至v0路径为0
final[v0] = 1; // v0至v0不需要路径
/* 开始主循环,每次求得v0到某个顶点v的最短路径*/
for (v = 1; v < G.vexNum; v++)
{
min = INFINITY; // 当前所知离v0顶点的最近距离
for (w = 0; w < G.vexNum; w++) // 寻找离v0最近的顶点
{
if (!final[w] && dist[w] < min)
{
k = w;
min = dist[w]; // w顶点离v0顶点更近
}
}
final[k] = 1; // 将目前找到的最近的顶点置为1
for (w = 0; w < G.vexNum; w++) // 修正当前最短路径及距离
{
/* 如果经过v顶点的路径比现在这条路径的长度短的话 */
if (!final[w] && (min + G.Edge[k][w] < dist[w]))
{
/* 找到了更短的路径,修改D[w]和P[w] */
dist[w] = min + G.Edge[k][w]; // 修改当前路径长度
path[w] = k;
}
}
}
} 上面数组final[]保存已有路径的结点,有最短路径的结点的值为 1,无最短路径的结点的值为 0,path[]数组记录结点 V 的前驱结点,dist[]数组,记录结点 V
的前驱结点。
首先进行初始化,final[]数组的元素的值均为 0,path[]数组的值均为 -1,当path[i]=-1时,说明此结点的前驱结点即是源点V,dist[]的元素值初始化为源点V
到邻接点的距离。
接着进入for循环,for循环内的第一个for循环用于找到 dist[] 数组的最小值。
for循环内的第二个for循环用于进行修正。
以上便是Dijkstra算法函数的基本内容。三大块——初始化,找dist[]最小元素、修正路径。
人生是一场无休、无歇、无情的战斗,凡是要做个够得上称为人的人,都得时时向无形的敌人作战。 ——罗曼·罗兰
以此句献给看这篇博客的每一个人。
智能推荐
class和struct的区别-程序员宅基地
文章浏览阅读101次。4.class可以有⽆参的构造函数,struct不可以,必须是有参的构造函数,⽽且在有参的构造函数必须初始。2.Struct适⽤于作为经常使⽤的⼀些数据组合成的新类型,表示诸如点、矩形等主要⽤来存储数据的轻量。1.Class⽐较适合⼤的和复杂的数据,表现抽象和多级别的对象层次时。2.class允许继承、被继承,struct不允许,只能继承接⼝。3.Struct有性能优势,Class有⾯向对象的扩展优势。3.class可以初始化变量,struct不可以。1.class是引⽤类型,struct是值类型。
android使用json后闪退,应用闪退问题:从json信息的解析开始就会闪退-程序员宅基地
文章浏览阅读586次。想实现的功能是点击顶部按钮之后按关键字进行搜索,已经可以从服务器收到反馈的json信息,但从json信息的解析开始就会闪退,加载listview也不知道行不行public abstract class loadlistview{public ListView plv;public String js;public int listlength;public int listvisit;public..._rton转json为什么会闪退
如何使用wordnet词典,得到英文句子的同义句_get_synonyms wordnet-程序员宅基地
文章浏览阅读219次。如何使用wordnet词典,得到英文句子的同义句_get_synonyms wordnet
系统项目报表导出功能开发_积木报表 多线程-程序员宅基地
文章浏览阅读521次。系统项目报表导出 导出任务队列表 + 定时扫描 + 多线程_积木报表 多线程
ajax 如何从服务器上获取数据?_ajax 获取http数据-程序员宅基地
文章浏览阅读1.1k次,点赞9次,收藏9次。使用AJAX技术的好处之一是它能够提供更好的用户体验,因为它允许在不重新加载整个页面的情况下更新网页的某一部分。另外,AJAX还使得开发人员能够创建更复杂、更动态的Web应用程序,因为它们可以在后台与服务器进行通信,而不需要打断用户的浏览体验。在Web开发中,AJAX(Asynchronous JavaScript and XML)是一种常用的技术,用于在不重新加载整个页面的情况下,从服务器获取数据并更新网页的某一部分。使用AJAX,你可以创建异步请求,从而提供更快的响应和更好的用户体验。_ajax 获取http数据
Linux图形终端与字符终端-程序员宅基地
文章浏览阅读2.8k次。登录退出、修改密码、关机重启_字符终端
随便推点
Python与Arduino绘制超声波雷达扫描_超声波扫描建模 python库-程序员宅基地
文章浏览阅读3.8k次,点赞3次,收藏51次。前段时间看到一位发烧友制作的超声波雷达扫描神器,用到了Arduino和Processing,可惜啊,我不会Processing更看不懂人家的程序,咋办呢?嘿嘿,所以我就换了个思路解决,因为我会一点Python啊,那就动手吧!在做这个案例之前先要搞明白一个问题:怎么将Arduino通过超声波检测到的距离反馈到Python端?这个嘛,我首先想到了串行通信接口。没错!就是串口。只要Arduino将数据发送给COM口,然后Python能从COM口读取到这个数据就可以啦!我先写了一个测试程序试了一下,OK!搞定_超声波扫描建模 python库
凯撒加密方法介绍及实例说明-程序员宅基地
文章浏览阅读4.2k次。端—端加密指信息由发送端自动加密,并且由TCP/IP进行数据包封装,然后作为不可阅读和不可识别的数据穿过互联网,当这些信息到达目的地,将被自动重组、解密,而成为可读的数据。不可逆加密算法的特征是加密过程中不需要使用密钥,输入明文后由系统直接经过加密算法处理成密文,这种加密后的数据是无法被解密的,只有重新输入明文,并再次经过同样不可逆的加密算法处理,得到相同的加密密文并被系统重新识别后,才能真正解密。2.使用时,加密者查找明文字母表中需要加密的消息中的每一个字母所在位置,并且写下密文字母表中对应的字母。_凯撒加密
工控协议--cip--协议解析基本记录_cip协议embedded_service_error-程序员宅基地
文章浏览阅读5.7k次。CIP报文解析常用到的几个字段:普通类型服务类型:[0x00], CIP对象:[0x02 Message Router], ioi segments:[XX]PCCC(带cmd和func)服务类型:[0x00], CIP对象:[0x02 Message Router], cmd:[0x101], fnc:[0x101]..._cip协议embedded_service_error
如何在vs2019及以后版本(如vs2022)上添加 添加ActiveX控件中的MFC类_vs添加mfc库-程序员宅基地
文章浏览阅读2.4k次,点赞9次,收藏13次。有时候我们在MFC项目开发过程中,需要用到一些微软已经提供的功能,如VC++使用EXCEL功能,这时候我们就能直接通过VS2019到如EXCEL.EXE方式,生成对应的OLE头文件,然后直接使用功能,那么,我们上篇文章中介绍了vs2017及以前的版本如何来添加。但由于微软某些方面考虑,这种方式已被放弃。从上图中可以看出,这一功能,在从vs2017版本15.9开始,后续版本已经删除了此功能。那么我们如果仍需要此功能,我们如何在新版本中添加呢。_vs添加mfc库
frame_size (1536) was not respected for a non-last frame_frame_size (1024) was not respected for a non-last-程序员宅基地
文章浏览阅读785次。用ac3编码,执行编码函数时报错入如下:[ac3 @ 0x7fed7800f200] frame_size (1536) was not respected for anon-last frame (avcodec_encode_audio2)用ac3编码时每次送入编码器的音频采样数应该是1536个采样,不然就会报上述错误。这个数字并非刻意固定,而是跟ac3内部的编码算法原理相关。全网找不到,国内音视频之路还有很长的路,音视频人一起加油吧~......_frame_size (1024) was not respected for a non-last frame
Android移动应用开发入门_在安卓移动应用开发中要在活动类文件中声迷你一个复选框变量-程序员宅基地
文章浏览阅读230次,点赞2次,收藏2次。创建Android应用程序一个项目里面可以有很多模块,而每一个模块就对应了一个应用程序。项目结构介绍_在安卓移动应用开发中要在活动类文件中声迷你一个复选框变量