电子模块|压力传感器模块HX711---C51&&STM32驱动_单片机hx711驱动-程序员宅基地
技术标签: stm32 HX711 电子模块 嵌入式硬件 压力传感器 单片机
实物照片
模块简介
HX711是一款专为高精度称重传感器而设计的24位A/D转换器芯片。与同类型其它芯片相比,该芯片集成了包括稳压电源、片内时钟振荡器等其它同类型芯片所需要的外围电路,具有集成度高、响应速度快、抗干扰性强等优点。降低了电子秤的整机成本,提高了整机的性能和可靠性。该芯片与后端MCU芯片的接口和编程非常简单,所有控制信号由管脚驱动,无需对芯片内部的寄存器编程。输入选择开关可任意选取通道A或通道B,与其内部的低噪声可编程放大器相连。通道A的可编程增益为128或64,对应的满额度差分输入信号幅值分别为±20mV或±40mV。通道B则为固定的32增益,用于系统参数检测。芯片内提供的稳压电源可以直接向外部传感器和芯片内的A/D转换器提供电源,系统板上无需另外的模拟电源。芯片内的时钟振荡器不需要任何外接器件。上电自动复位功能简化了开机的初始化过程。
模块特点
- 两路可选择差分输入
- 片内低噪声可编程放大器,可选增益为64 和128
- 片内稳压电路可直接向外部传感器和芯片内A/D 转换器提供电源
- 片内时钟振荡器无需任何外接器件,必要时也可使用外接晶振或时钟
- 上电自动复位电路
- 简单的数字控制和串口通讯:所有控制由管脚输入,芯片内寄存器无需编程
- 可选择10Hz 或80Hz 的输出数据速率
- 同步抑制50Hz 和60Hz 的电源干扰
- 耗电量(含稳压电源电路):典型工作电流:<1.7mA, 断电电流:<1μA
- 工作电压范围:2.6 ~ 5.5V
- 工作温度范围:-20 ~ +85℃
- 16 管脚的SOP-16 封装
软件驱动
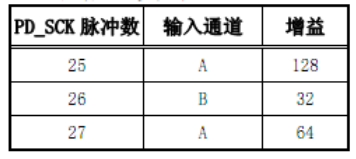
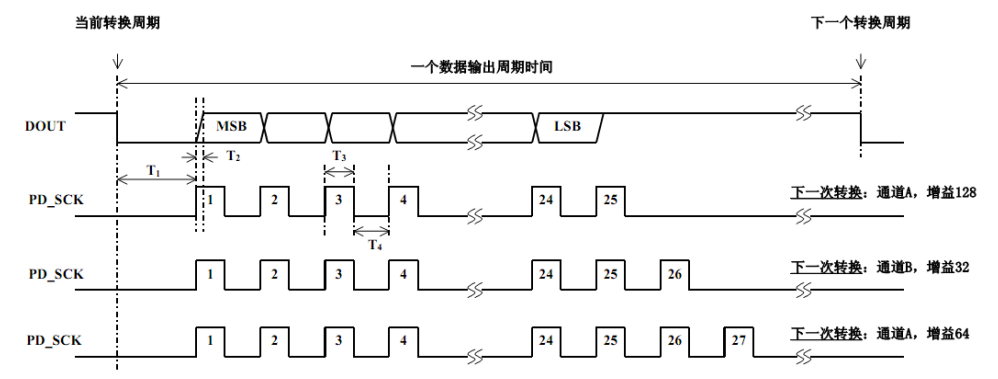
串口通讯线由管脚PD_SCK和DOUT组成,用来输出数据,选择输入通道和增益。当数据输出管脚DOUT为高电平时,表明A/D转换器还未准备好输出数据,此时串口时钟输入信号PD_SCK应为低电平。当DOUT从高电平变低电平后,PD_SCK应输入25至27个不等的时钟脉冲。其中第一个时钟脉冲的上升沿将读出输出24位数据的最高位(MSB),直至第24个时钟脉冲完成,24位输出数据从最高位至最低位逐位输出完成。第25至27个时钟脉冲用来选择下一次A/D转换的输入通道和增益。
PD_SCK的输入时钟脉冲数不应少于25或多于27,否则会造成串口通讯错误。当A/D转换器的输入通道或增益改变时,A/D转换器需要4个数据输出周期才能稳定。DOUT在4个数据输出周期后才会从高电平变低电平,输出有效数据。
数据输出,输入通道和增益选择时序图
通过测得的AD值,转为重力原理如下:
假设重力为 A Kg,(x<5Kg),测量出来的 AD 值为 y
传感器输出,发送给 AD 模块儿的电压为 A Kg * 4.3mV / 5Kg = 0.86A mV
经过 128 倍增益后为 128 * 0.86A = 110.08AmV
转换为 24bit 数字信号为 110.08A mV * 224 / 4.3V = 429496.7296A
所以 y = 429496.7296A
因此得出 A = y / 429496.7296
所以得出程序中计算公式
Weight_Shiwu = (unsigned long)((float)Weight_Shiwu/429.5)
C51软件代码
sbit ADDO = P1^5;
sbit ADSK = P0^0;
unsigned long ReadCount(void)
{
unsigned long Count;
unsigned char i;
ADSK=0;
//使能AD(PD_SCK 置低)
Count=0;
while(ADDO);
//AD转换未结束则等待,否则开始读取
for (i=0;i<24;i++)
{
ADSK=1;
//PD_SCK 置高(发送脉冲)
Count=Count<<1; //下降沿来时变量Count左移一位,右侧补零
ADSK=0;
//PD_SCK 置低
if(ADDO) Count++;
}
ADSK=1;
Count=Count^0x800000;//第25个脉冲下降沿来时,转换数据
ADSK=0;
return(Count);
}
STM32软件代码
#define DWT_CYCCNT *(volatile unsigned int *)0xE0001004
#define DWT_CR *(volatile unsigned int *)0xE0001000
#define DEM_CR *(volatile unsigned int *)0xE000EDFC
#define DBGMCU_CR *(volatile unsigned int *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
#define WEIGHT_CAP_NUM 1 //重量采集数量 滤波使用
uint8_t ucWeightCapCompleteFlag= 0; //重量采集完成标志
uint8_t ucWeightCapCount = 0; //重量采集计数
int32_t ilWeightRawDataAddToal = 0; //重量AD数据累计
int16_t iWeightRawData = 0; //重量AD数据
/*
*********************************************************************************************************
* 函 数 名: bsp_InitDWT
* 功能说明: 初始化DWT.
*********************************************************************************************************
*/
void bsp_InitDWT(void)
{
DEM_CR |= (unsigned int)DEM_CR_TRCENA; /* Enable Cortex-M4's DWT CYCCNT reg. */
DWT_CYCCNT = (unsigned int)0u;
DWT_CR |= (unsigned int)DWT_CR_CYCCNTENA;
}
/*
*********************************************************************************************************
* 函 数 名: DWT_DelayUS
* 功能说明: 这里的延时采用CPU的内部计数实现,32位计数器
* OSSchedLock(&err);
* bsp_DelayUS(5);
* OSSchedUnlock(&err); 根据实际情况看看是否需要加调度锁或选择关中断
* 形 参: _ulDelayTime 延迟长度,单位1 us
*********************************************************************************************************
*/
void DWT_DelayUS(uint32_t _ulDelayTime)
{
uint32_t tCnt, tDelayCnt;
uint32_t tStart;
tStart = DWT_CYCCNT; /* 刚进入时的计数器值 */
tCnt = 0;
tDelayCnt = _ulDelayTime * (SystemCoreClock / 1000000); /* 需要的节拍数 */
while(tCnt < tDelayCnt)
{
tCnt = DWT_CYCCNT - tStart; /* 求减过程中,如果发生第一次32位计数器重新计数,依然可以正确计算 */
}
}
/*
*********************************************************************************************************
* 函 数 名: HX711_GPIOInit
* 功能说明: 重量芯片HX711 GPIO初始化
*********************************************************************************************************
*/
void HX711_GPIOInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能PORTA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //PA7 推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //PA6 推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
/*
*********************************************************************************************************
* 函 数 名: HX711_Init
* 功能说明: 重量芯片HX711初始化
*********************************************************************************************************
*/
void HX711_Init(void)
{
CH376_SPI_SCS = 1; //CH376 片选失能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, DISABLE);
SPI_Cmd(SPI1, DISABLE); //禁止SPI
HX711_GPIOInit(); //初始化IO
}
/*
*********************************************************************************************************
* 函 数 名: Task_WeightCap
* 功能说明: 重量采集任务
*********************************************************************************************************
*/
void Task_WeightCap(void)
{
uint32_t count = 0;
int16_t raw_data = 0;
uint8_t i;
HX711_Init(); //HX711重新初始化
ADSK = 0;
count= 0;
while(ADDO);
for(i=0; i<24; i++)
{
ADSK = 1;
DWT_DelayUS(1);
count = count << 1;
ADSK = 0;
DWT_DelayUS(1);
if(ADDO)
{
count++;
}
}
//第25个时钟信号
ADSK=1;
DWT_DelayUS(1);
ADSK=0;
DWT_DelayUS(1);
raw_data = count >> 8;
ilWeightRawDataAddToal = raw_data + ilWeightRawDataAddToal;
ucWeightCapCount++;
if(ucWeightCapCount == WEIGHT_CAP_NUM)
{
ucWeightCapCount = 0;
iWeightRawData = ilWeightRawDataAddToal / WEIGHT_CAP_NUM;
ilWeightRawDataAddToal = 0;
ucWeightCapCompleteFlag = 1;
}
}
/*
*********************************************************************************************************
* 函 数 名: GetWeightRawData
* 功能说明: 得到重量的原始值
* 形 参: iRawData 原始值
* 返 回 值: 1 已经得到 0 没有得到
*********************************************************************************************************
*/
uint8_t GetWeightRawData(int16_t *iRawData)
{
if(ucWeightCapCompleteFlag == 1)
{
*iRawData = iWeightRawData;
ucWeightCapCompleteFlag = 0;
return 1;
}
return 0;
}
智能推荐
使用nginx解决浏览器跨域问题_nginx不停的xhr-程序员宅基地
文章浏览阅读1k次。通过使用ajax方法跨域请求是浏览器所不允许的,浏览器出于安全考虑是禁止的。警告信息如下:不过jQuery对跨域问题也有解决方案,使用jsonp的方式解决,方法如下:$.ajax({ async:false, url: 'http://www.mysite.com/demo.do', // 跨域URL ty..._nginx不停的xhr
在 Oracle 中配置 extproc 以访问 ST_Geometry-程序员宅基地
文章浏览阅读2k次。关于在 Oracle 中配置 extproc 以访问 ST_Geometry,也就是我们所说的 使用空间SQL 的方法,官方文档链接如下。http://desktop.arcgis.com/zh-cn/arcmap/latest/manage-data/gdbs-in-oracle/configure-oracle-extproc.htm其实简单总结一下,主要就分为以下几个步骤。..._extproc
Linux C++ gbk转为utf-8_linux c++ gbk->utf8-程序员宅基地
文章浏览阅读1.5w次。linux下没有上面的两个函数,需要使用函数 mbstowcs和wcstombsmbstowcs将多字节编码转换为宽字节编码wcstombs将宽字节编码转换为多字节编码这两个函数,转换过程中受到系统编码类型的影响,需要通过设置来设定转换前和转换后的编码类型。通过函数setlocale进行系统编码的设置。linux下输入命名locale -a查看系统支持的编码_linux c++ gbk->utf8
IMP-00009: 导出文件异常结束-程序员宅基地
文章浏览阅读750次。今天准备从生产库向测试库进行数据导入,结果在imp导入的时候遇到“ IMP-00009:导出文件异常结束” 错误,google一下,发现可能有如下原因导致imp的数据太大,没有写buffer和commit两个数据库字符集不同从低版本exp的dmp文件,向高版本imp导出的dmp文件出错传输dmp文件时,文件损坏解决办法:imp时指定..._imp-00009导出文件异常结束
python程序员需要深入掌握的技能_Python用数据说明程序员需要掌握的技能-程序员宅基地
文章浏览阅读143次。当下是一个大数据的时代,各个行业都离不开数据的支持。因此,网络爬虫就应运而生。网络爬虫当下最为火热的是Python,Python开发爬虫相对简单,而且功能库相当完善,力压众多开发语言。本次教程我们爬取前程无忧的招聘信息来分析Python程序员需要掌握那些编程技术。首先在谷歌浏览器打开前程无忧的首页,按F12打开浏览器的开发者工具。浏览器开发者工具是用于捕捉网站的请求信息,通过分析请求信息可以了解请..._初级python程序员能力要求
Spring @Service生成bean名称的规则(当类的名字是以两个或以上的大写字母开头的话,bean的名字会与类名保持一致)_@service beanname-程序员宅基地
文章浏览阅读7.6k次,点赞2次,收藏6次。@Service标注的bean,类名:ABDemoService查看源码后发现,原来是经过一个特殊处理:当类的名字是以两个或以上的大写字母开头的话,bean的名字会与类名保持一致public class AnnotationBeanNameGenerator implements BeanNameGenerator { private static final String C..._@service beanname
随便推点
二叉树的各种创建方法_二叉树的建立-程序员宅基地
文章浏览阅读6.9w次,点赞73次,收藏463次。1.前序创建#include<stdio.h>#include<string.h>#include<stdlib.h>#include<malloc.h>#include<iostream>#include<stack>#include<queue>using namespace std;typed_二叉树的建立
解决asp.net导出excel时中文文件名乱码_asp.net utf8 导出中文字符乱码-程序员宅基地
文章浏览阅读7.1k次。在Asp.net上使用Excel导出功能,如果文件名出现中文,便会以乱码视之。 解决方法: fileName = HttpUtility.UrlEncode(fileName, System.Text.Encoding.UTF8);_asp.net utf8 导出中文字符乱码
笔记-编译原理-实验一-词法分析器设计_对pl/0作以下修改扩充。增加单词-程序员宅基地
文章浏览阅读2.1k次,点赞4次,收藏23次。第一次实验 词法分析实验报告设计思想词法分析的主要任务是根据文法的词汇表以及对应约定的编码进行一定的识别,找出文件中所有的合法的单词,并给出一定的信息作为最后的结果,用于后续语法分析程序的使用;本实验针对 PL/0 语言 的文法、词汇表编写一个词法分析程序,对于每个单词根据词汇表输出: (单词种类, 单词的值) 二元对。词汇表:种别编码单词符号助记符0beginb..._对pl/0作以下修改扩充。增加单词
android adb shell 权限,android adb shell权限被拒绝-程序员宅基地
文章浏览阅读773次。我在使用adb.exe时遇到了麻烦.我想使用与bash相同的adb.exe shell提示符,所以我决定更改默认的bash二进制文件(当然二进制文件是交叉编译的,一切都很完美)更改bash二进制文件遵循以下顺序> adb remount> adb push bash / system / bin /> adb shell> cd / system / bin> chm..._adb shell mv 权限
投影仪-相机标定_相机-投影仪标定-程序员宅基地
文章浏览阅读6.8k次,点赞12次,收藏125次。1. 单目相机标定引言相机标定已经研究多年,标定的算法可以分为基于摄影测量的标定和自标定。其中,应用最为广泛的还是张正友标定法。这是一种简单灵活、高鲁棒性、低成本的相机标定算法。仅需要一台相机和一块平面标定板构建相机标定系统,在标定过程中,相机拍摄多个角度下(至少两个角度,推荐10~20个角度)的标定板图像(相机和标定板都可以移动),即可对相机的内外参数进行标定。下面介绍张氏标定法(以下也这么称呼)的原理。原理相机模型和单应矩阵相机标定,就是对相机的内外参数进行计算的过程,从而得到物体到图像的投影_相机-投影仪标定
Wayland架构、渲染、硬件支持-程序员宅基地
文章浏览阅读2.2k次。文章目录Wayland 架构Wayland 渲染Wayland的 硬件支持简 述: 翻译一篇关于和 wayland 有关的技术文章, 其英文标题为Wayland Architecture .Wayland 架构若是想要更好的理解 Wayland 架构及其与 X (X11 or X Window System) 结构;一种很好的方法是将事件从输入设备就开始跟踪, 查看期间所有的屏幕上出现的变化。这就是我们现在对 X 的理解。 内核是从一个输入设备中获取一个事件,并通过 evdev 输入_wayland