嵌入式Linux应用开发-第十五章具体单板的按键驱动程序①RK3288的按键驱动程序-程序员宅基地
技术标签: c++ Linux ARM MCU c语言 运维 linux MCU C51 单片机
嵌入式Linux应用开发-第十五章具体单板的按键驱动程序①RK3288的按键驱动程序
第十五章 具体单板的按键驱动程序(查询方式)

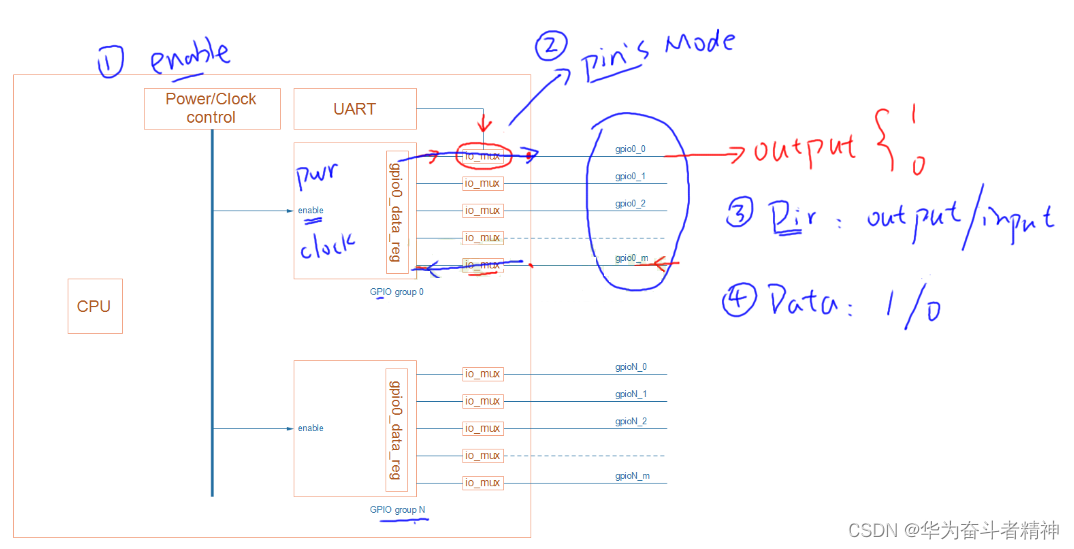
15.1 GPIO操作回顾
参考《第四章 普适的 GPIO引脚操作方法》、《第五章 具体单板的 GPIO操作方法》。
15.2 AM335X的按键驱动程序(查询方式)
15.2.1 先看原理图确定引脚及操作方法
AM335X是底板+核心板的结构,打开底板原理图 xxxxxx_am335x_v12_原理图.pdf,它有 4个按键,本视频只操作一个按键,原理图如下:
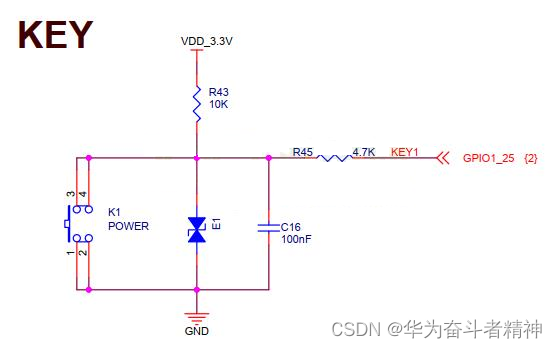
平时按键电平为高,按下按键后电平为低。 按键引脚为 GPIO1_25。
15.2.2 再看芯片手册确定寄存器及操作方法
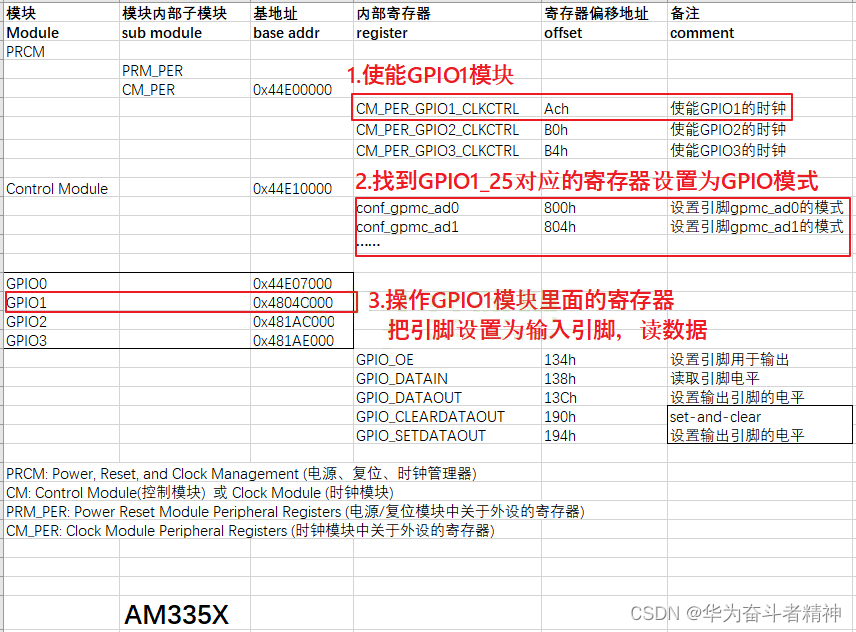
步骤 1:
使能 GPIO1模块
设置CM_PER_GPIO1_CLKCTRL寄存器的bit[18]为1,bit[1:0]为0x2,该寄存器地址为0x44E00000+0xAC。

步骤 2:
把 GPIO1_25对应的引脚设置为 GPIO模式
要用哪一个寄存器来把 GPIO1_25对应的引脚设置为 GPIO模式?
① 在核心板原理图 ET-som335X原理图.pdf里搜“GPIO1_25”,可以看到下图,确定 pin number为 U16:

② 在芯片手册 AM335x Sitara Processors.pdf里搜“U16”,可得下图,引脚名为 GPMC_A9,用作 GPIO时要设置为 mode 7:
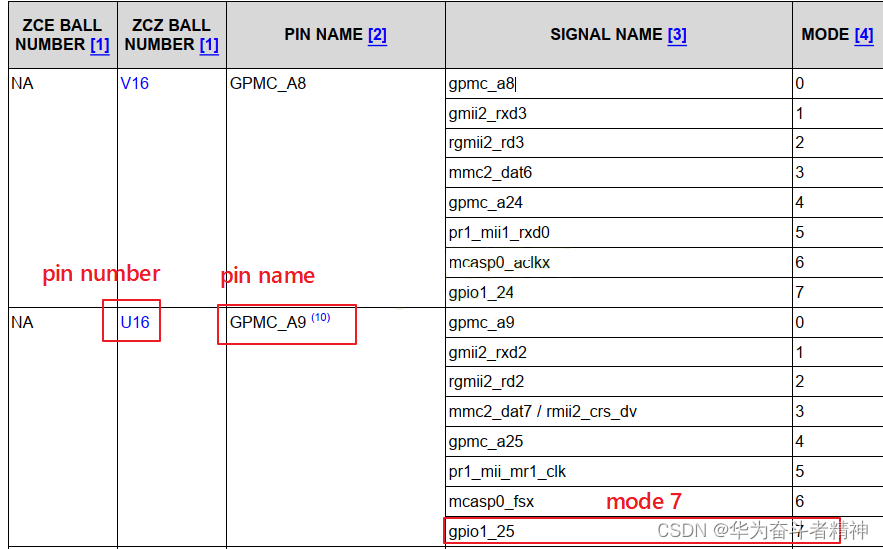
③ 在芯片手册 AM335x_datasheet_spruh73p.pdf中搜 gpmc_a9,
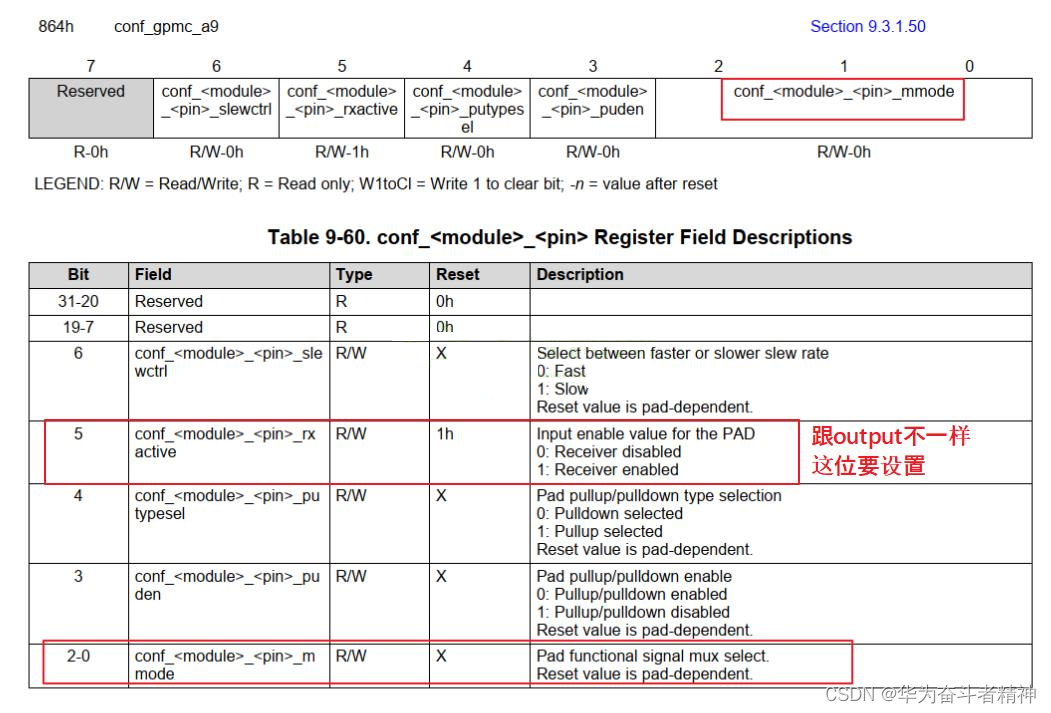
所以,要把GPIO1_25对应的引脚设置为 GPIO模式,要设置 conf_gpmc_a9寄存器的bit[5]为1,bit[2:0]为 7,这个寄存器的地址是 0x44E10000+0x864。
步骤 3:
设置 GPIO1内部寄存器,把 GPIO1_25设置为输入引脚,读数据寄存器 GPIO_OE寄存器:地址为 0x4804C000+0x134,bit[25]设置为 1。
GPIO_DATAIN寄存器:地址为 0x4804C000+0x138,读其 bit[25]。


15.2.3 编程
15.2.3.1 程序框架
使用 GIT下载所有源码后,本节源码位于如下目录:
01_all_series_quickstart\
05_嵌入式 Linux驱动开发基础知识\source\
04_button_drv\02_button_drv_for_boards\01_button_drv_for_am335x
15.2.3.2 硬件相关的代码
主要看 board_am335x.c,先看它的入口函数,代码如下。
第 84行向上层驱动注册一个 button_operations结构体,该结构体在第 76~80行定义。
76 static struct button_operations my_buttons_ops = {
77 .count = 1,
78 .init = board_am335x_button_init,
79 .read = board_am335x_button_read,
80 };
81
82 int board_am335x_button_drv_init(void)
83 {
84 register_button_operations(&my_buttons_ops);
85 return 0;
86 }
87
button_operations结构体中有 init函数指针,它指向 board_am335x_button_init函数,在里面将会初始化 LED引脚:使能、设置为 GPIO模式、设置为输出引脚。代码如下。
值得关注的是第 32~35行,对于寄存器要先使用 ioremap得到它的虚拟地址,以后使用虚拟地址访问寄存器。
21 static volatile unsigned int *CM_PER_GPIO1_CLKCTRL;
22 static volatile unsigned int *conf_gpmc_a9;
23 static volatile unsigned int *GPIO1_OE;
24 static volatile unsigned int *GPIO1_DATAIN;
25
26 static void board_am335x_button_init (int which) /* 初始化 button, which-哪个 button */
27 {
28 if (which == 0)
29 {
30 if (!CM_PER_GPIO1_CLKCTRL)
31 {
32 CM_PER_GPIO1_CLKCTRL = ioremap(0x44E00000 + 0xAC, 4);
33 conf_gpmc_a9 = ioremap(0x44E10000 + 0x864, 4);
34 GPIO1_OE = ioremap(0x4804C000 + 0x134, 4);
35 GPIO1_DATAIN = ioremap(0x4804C000 + 0x138, 4);
36 }
37
38 //printk("%s %s line %d, led %d\n", __FILE__, __FUNCTION__, __LINE__, which);
39 /* a. 使能 GPIO1
40 * set PRCM to enalbe GPIO1
41 * set CM_PER_GPIO1_CLKCTRL (0x44E00000 + 0xAC)
42 * val: (1<<18) | 0x2
43 */
44 *CM_PER_GPIO1_CLKCTRL = (1<<18) | 0x2;
45
46 /* b. 设置 GPIO1_25的功能,让它工作于 GPIO模式
47 * set Control Module to set GPIO1_25 (U16) used as GPIO
48 * conf_gpmc_a9 as mode 7
49 * addr : 0x44E10000 + 0x864
50 * bit[5] : 1, Input enable value for the PAD
51 * bit[2:0] : mode 7
52 */
53 *conf_gpmc_a9 = (1<<5) | 7;
54
55 /* c. 设置 GPIO1_25的方向,让它作为输入引脚
56 * set GPIO1's registers , to set 设置 GPIO1_25的方向'S dir (input)
57 * GPIO_OE
58 * addr : 0x4804C000 + 0x134
59 * set bit 25
60 */
61
62 *GPIO1_OE |= (1<<25); 63 }
64
65 }
66
button_operations结构体中还有有 read函数指针,它指向 board_am335x_button_read函数,在里面将会读取并返回按键引脚的电平。代码如下。
67 static int board_am335x_button_read (int which) /* 读 button, which-哪个 */
68 {
69 printk("%s %s line %d, button %d, 0x%x\n", __FILE__, __FUNCTION__, __LINE__, which, *GPIO1_DATAIN);
70 if (which == 0)
71 return (*GPIO1_DATAIN & (1<<25)) ? 1 : 0;
72 else
73 return 0;
74 }
75
15.2.3.3 测试
安装驱动程序之后执行测试程序,观察它的返回值(执行测试程序的同时操作按键):
# insmod button_drv.ko
# insmod board_am335x.ko
# ./button_test /dev/xxxxxx_button0
15.2.4 课后作业
① 修改 board_am335x.c,增加更多按键
② 修改 button_test.c,使用按键来点灯
15.3 RK3288的按键驱动程序(查询方式)
15.3.1 先看原理图确定引脚及操作方法
Firefly的 RK3288开发板上没有按键,我们为它制作的扩展板上有 1个按键。在扩展板原理图rk3288_extend_v12_0715.pdf中可以看到按键,如下:
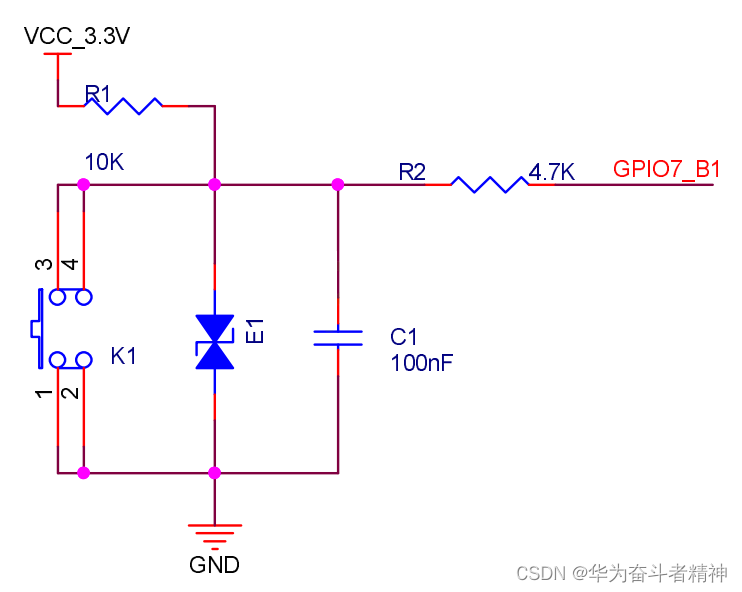
平时按键电平为高,按下按键后电平为低。 按键引脚为 GPIO7_B1。
15.3.2 再看芯片手册确定寄存器及操作方法
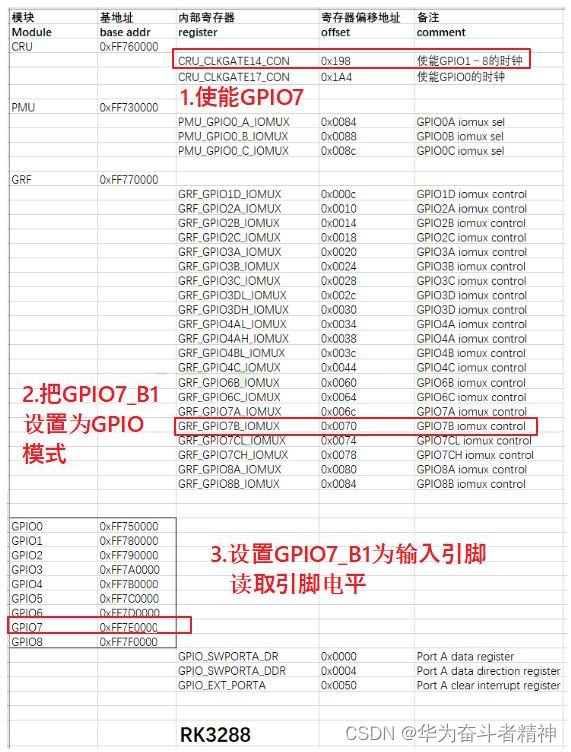
芯片手册为 Rockchip_RK3288_TRM_V1.2_Part1-20170321.pdf,不过我们总结如下。
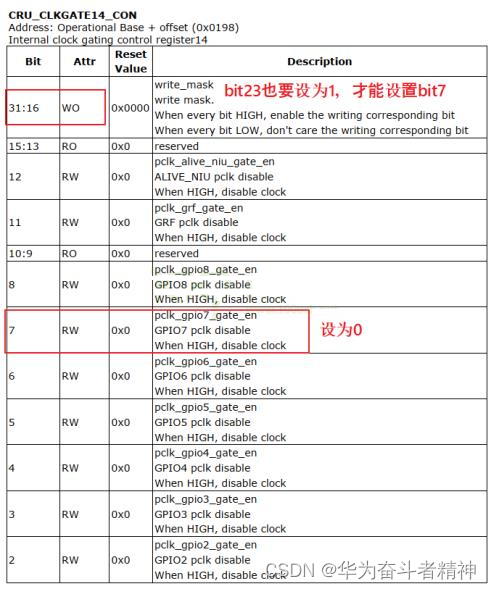
步骤 1:
使能 GPIO7模块
设置 CRU_CLKGATE14_CON寄存器的 bit[7]为 0。 要设置 bit7,必须同时设置 bit23为 1。
该寄存器地址为 0xFF760000+0x198。
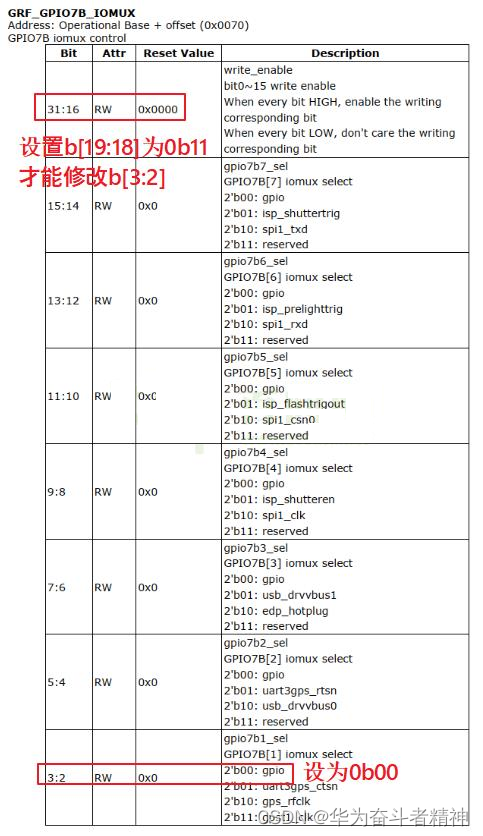
步骤 2:
把 GPIO7_B1对应的引脚设置为 GPIO模式
设置 GRF_GPIO7B_IOMUX寄存器的 bit[3:2]为 0b00。 要设置 bit[3:2],必须同时设置 bit[19:18]为 0b11。 该寄存器地址为 0xFF770000+0x0070。
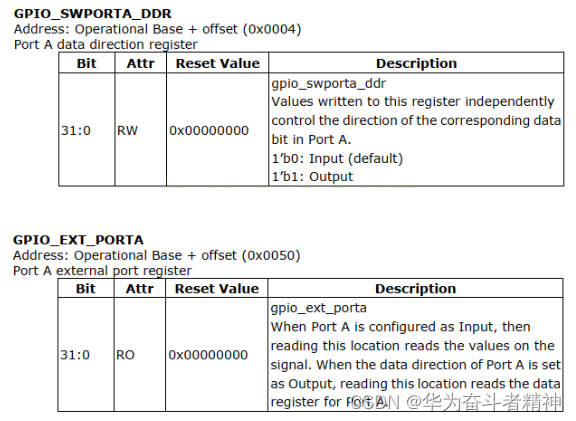
步骤 3:
设置 GPIO7内部寄存器,把 GPIO7_B1设置为输入引脚,读数据寄存器
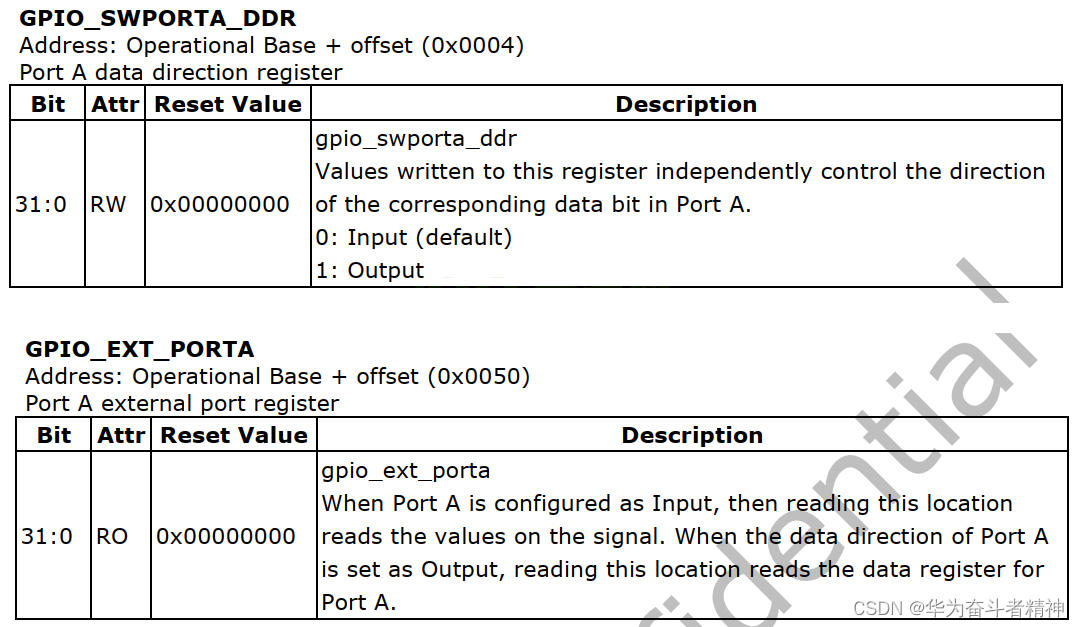
GPIO_SWPORTA_DDR方向寄存器:地址为 0xFF7E0000+ 0x0004,bit[9]设置为 0。 GPIO_EXT_PORTA外部端口寄存器:地址为 0xFF7E0000+ 0x0050,读其 bit[9]。
注意:
GPIO_A0~A7 对应 bit0bit7;GPIO_B0B7 对应 bit8~bit15;
GPIO_C0~C7 对应 bit16bit23;GPIO_D0D7 对应 bit24~bit31
15.3.3 编程
15.3.1.1 程序框架
使用 GIT下载所有源码后,本节源码位于如下目录:
01_all_series_quickstart\
05_嵌入式 Linux驱动开发基础知识\source\
04_button_drv\02_button_drv_for_boards\02_button_drv_for_rk3288
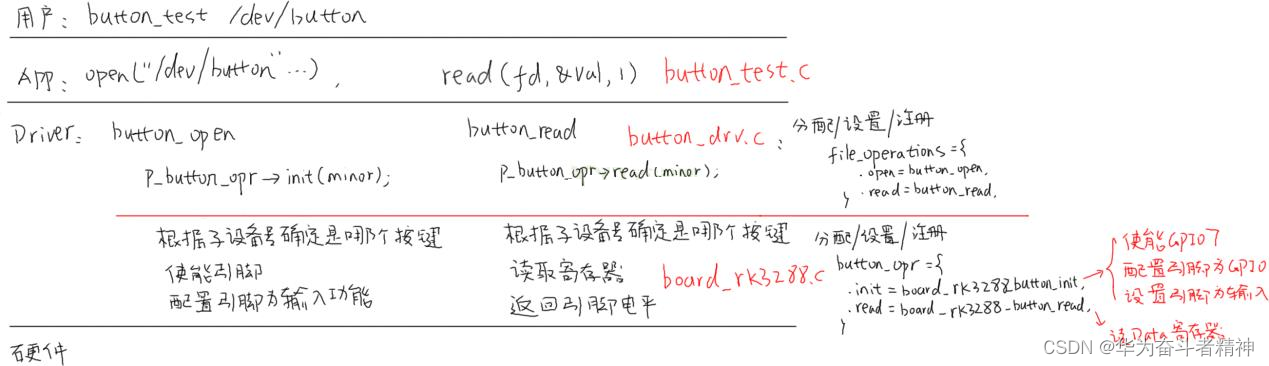
15.3.1.2 硬件相关的代码
主要看 board_rk3288.c,先看它的入口函数,代码如下。
第 81行向上层驱动注册一个 button_operations结构体,该结构体在第 73~77行定义。 73 static struct button_operations
my_buttons_ops = {
74 .count = 1,
75 .init = board_rk3288_button_init,
76 .read = board_rk3288_button_read,
77 };
78
79 int board_rk3288_button_drv_init(void)
80 {
81 register_button_operations(&my_buttons_ops);
82 return 0;
83 }
button_operations结构体中有 init函数指针,它指向 board_rk3288_button_init函数,在里面将会初始化 LED引脚:使能、设置为 GPIO模式、设置为输出引脚。代码如下。
值得关注的是第 32~35行,对于寄存器要先使用 ioremap得到它的虚拟地址,以后使用虚拟地址访问寄存器。
21 static volatile unsigned int *CRU_CLKGATE14_CON;
22 static volatile unsigned int *GRF_GPIO7B_IOMUX ;
23 static volatile unsigned int *GPIO7_SWPORTA_DDR;
24 static volatile unsigned int *GPIO7_EXT_PORTA ;
25
26 static void board_rk3288_button_init (int which) /* 初始化 button, which-哪个 button */
27 {
28 if (which == 0)
29 {
30 if (!CRU_CLKGATE14_CON)
31 {
32 CRU_CLKGATE14_CON = ioremap(0xFF760000 + 0x0198, 4);
33 GRF_GPIO7B_IOMUX = ioremap(0xFF770000 + 0x0070, 4);
34 GPIO7_SWPORTA_DDR = ioremap(0xFF7E0000 + 0x0004, 4);
35 GPIO7_EXT_PORTA = ioremap(0xFF7E0000 + 0x0050, 4);
36 }
37
38 /* rk3288 GPIO7_B1 */
39 /* a. 使能 GPIO7
40 * set CRU to enable GPIO7
41 * CRU_CLKGATE14_CON 0xFF760000 + 0x198
42 * (1<<(7+16)) | (0<<7)
43 */
44 *CRU_CLKGATE14_CON = (1<<(7+16)) | (0<<7);
45
46 /* b. 设置 GPIO7_B1用于 GPIO
47 * set PMU/GRF to configure GPIO7_B1 as GPIO
48 * GRF_GPIO7B_IOMUX 0xFF770000 + 0x0070
49 * bit[3:2] = 0b00
50 * (3<<(2+16)) | (0<<2)
51 */
52 *GRF_GPIO7B_IOMUX =(3<<(2+16)) | (0<<2);
53
54 /* c. 设置 GPIO7_B1作为 input引脚
55 * set GPIO_SWPORTA_DDR to configure GPIO7_B1 as input 56 * GPIO_SWPORTA_DDR 0xFF7E0000 + 0x0004
57 * bit[9] = 0b0
58 */
59 *GPIO7_SWPORTA_DDR &= ~(1<<9);
60 }
61
62 }
button_operations结构体中还有有 read函数指针,它指向 board_rk3288_button_read函数,在里面将会读取并返回按键引脚的电平。代码如下。
64 static int board_rk3288_button_read (int which) /* 读 button, which-哪个 */
65 {
66 //printk("%s %s line %d, button %d, 0x%x\n", __FILE__, __FUNCTION__, __LINE__, which, *GPIO1_DATAIN);
67 if (which == 0)
68 return (*GPIO7_EXT_PORTA & (1<<9)) ? 1 : 0;
69 else
70 return 0;
71 }
15.3.4 测试
安装驱动程序之后执行测试程序,观察它的返回值(执行测试程序的同时操作按键):
# insmod button_drv.ko
# insmod board_rk3288.ko
# ./button_test /dev/xxxxxx_button0
15.3.5 课后作业
① 修改 button_test.c,使用按键来点灯
15.4 RK3399的按键驱动程序(查询方式)
15.4.1 先看原理图确定引脚及操作方法
Firefly的 RK3399开发板上没有按键,我们为它制作的扩展板上有 3个按键。在扩展板原理图rk3399_extend_v12_0709final.pdf中可以看到按键,如下:
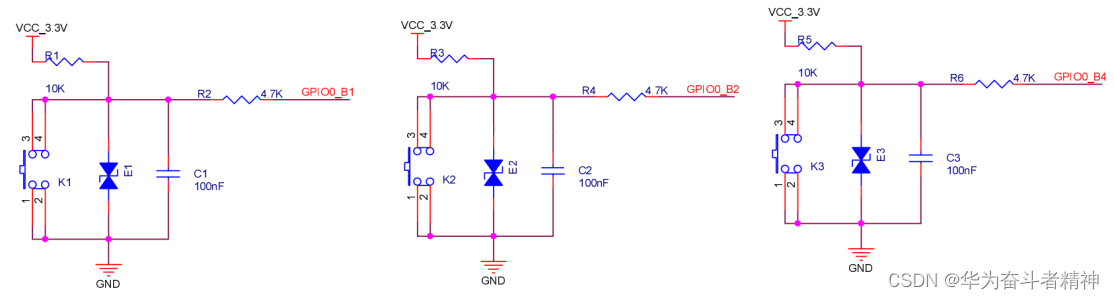
平时按键电平为高,按下按键后电平为低。
按键引脚为 GPIO0_B1、GPIO0_B2、GPIO0_B4。 本视频中,只操作一个按键:GPIO0_B1。
15.4.2 再看芯片手册确定寄存器及操作方法
芯片手册为 Rockchip RK3399TRM V1.3 Part1.pdf和 Rockchip RK3399TRM V1.3 Part2.pdf,不过我们总结如下。
步骤 1:
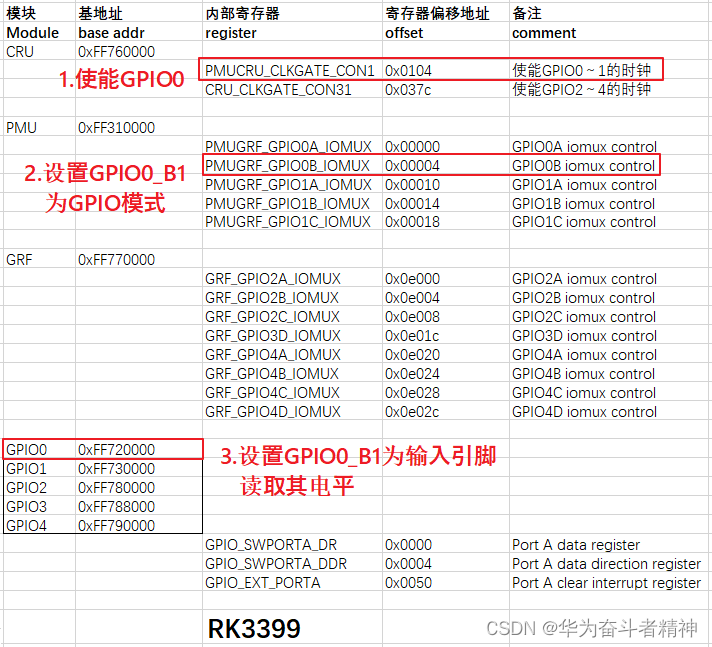
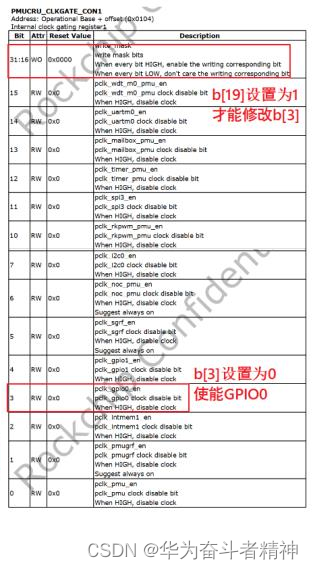
使能 GPIO0模块
设置 PMUCRU_CLKGATE_CON1寄存器的 bit[3]为 0。
要设置 bit3,必须同时设置 bit19为 1。 该寄存器地址为 0xFF760000+ 0x0104。
步骤 2:
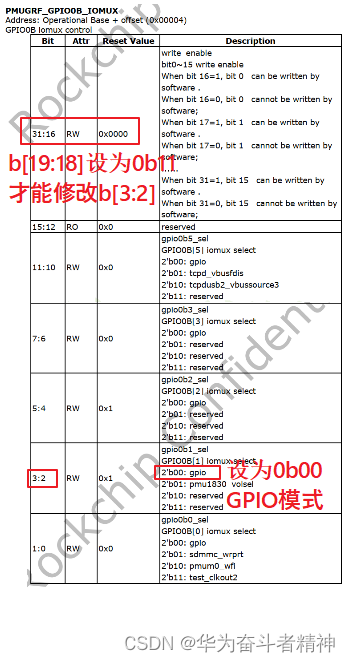
把 GPIO0_B1对应的引脚设置为 GPIO模式
设置 PMUGRF_GPIO0B_IOMUX寄存器的 bit[3:2]为 0b00。 要设置 bit[3:2],必须同时设置 bit[19:18]为 0b11。 该寄存器地址为 0xFF310000+0x0004。
步骤 3:
设置 GPIO0内部寄存器,把 GPIO0_B1设置为输入引脚,读数据寄存器 这些寄存器的介绍在芯片手册 Rockchip RK3399TRM V1.3 Part2.pdf中。
GPIO_SWPORTA_DDR方向寄存器:地址为 0xFF720000+ 0x0004,bit[9]设置为 0。 GPIO_EXT_PORTA外部端口寄存器:地址为 0xFF720000+ 0x0050,读其 bit[9]。
注意:
GPIO_A0~A7 对应 bit0bit7;GPIO_B0B7 对应 bit8~bit15;
GPIO_C0~C7 对应 bit16bit23;GPIO_D0D7 对应 bit24~bit31
15.4.3 编程
15.4.3.1 程序框架
使用 GIT下载所有源码后,本节源码位于如下目录:
01_all_series_quickstart\
05_嵌入式 Linux驱动开发基础知识\source\
04_button_drv\02_button_drv_for_boards\03_button_drv_for_rk3399
15.4.3.2 硬件相关的代码
主要看 board_rk3399.c,先看它的入口函数,代码如下。
第 81行向上层驱动注册一个 button_operations结构体,该结构体在第 73~77行定义。
73 static struct button_operations my_buttons_ops = {
74 .count = 1,
75 .init = board_rk3399_button_init,
76 .read = board_rk3399_button_read,
77 };
78
79 int board_rk3399_button_drv_init(void)
80 {
81 register_button_operations(&my_buttons_ops); 82 return 0;
83 }
button_operations结构体中有 init函数指针,它指向 board_rk3399_button_init函数,在里面将会初始化 LED引脚:使能、设置为 GPIO模式、设置为输出引脚。代码如下。
值得关注的是第 32~35行,对于寄存器要先使用 ioremap得到它的虚拟地址,以后使用虚拟地址访问寄存器。
21 static volatile unsigned int *PMUCRU_CLKGATE_CON1;
22 static volatile unsigned int *GRF_GPIO0B_IOMUX ;
23 static volatile unsigned int *GPIO0_SWPORTA_DDR;
24 static volatile unsigned int *GPIO0_EXT_PORTA ;
25
26 static void board_rk3399_button_init (int which) /* 初始化 button, which-哪个 button */
27 {
28 if (which == 0)
29 {
30 if (!PMUCRU_CLKGATE_CON1)
31 {
32 PMUCRU_CLKGATE_CON1 = ioremap(0xFF760000+ 0x0104, 4);
33 GRF_GPIO0B_IOMUX = ioremap(0xFF310000+0x0004, 4);
34 GPIO0_SWPORTA_DDR = ioremap(0xFF720000 + 0x0004, 4);
35 GPIO0_EXT_PORTA = ioremap(0xFF720000 + 0x0050, 4);
36 }
37
38 /* rk3399 GPIO0_B1 */
39 /* a. 使能 GPIO0
40 * set CRU to enable GPIO0
41 * PMUCRU_CLKGATE_CON1 0xFF760000+ 0x0104
42 * (1<<(3+16)) | (0<<3)
43 */
44 *PMUCRU_CLKGATE_CON1 = (1<<(3+16)) | (0<<3);
45
46 /* b. 设置 GPIO0_B1用于 GPIO
47 * set PMU/GRF to configure GPIO0_B1 as GPIO
48 * GRF_GPIO0B_IOMUX 0xFF310000+0x0004
49 * bit[3:2] = 0b00
50 * (3<<(2+16)) | (0<<2)
51 */
52 *GRF_GPIO0B_IOMUX =(3<<(2+16)) | (0<<2);
53
54 /* c. 设置 GPIO0_B1作为 input引脚
55 * set GPIO_SWPORTA_DDR to configure GPIO0_B1 as input 56 * GPIO_SWPORTA_DDR 0xFF720000 + 0x0004
57 * bit[9] = 0b0
58 */
59 *GPIO0_SWPORTA_DDR &= ~(1<<9);
60 }
61
62 }
button_operations结构体中还有有 read函数指针,它指向 board_rk3399_button_read函数,在里面将会读取并返回按键引脚的电平。代码如下。
64 static int board_rk3399_button_read (int which) /* 读 button, which-哪个 */
65 {
66 //printk("%s %s line %d, button %d, 0x%x\n", __FILE__, __FUNCTION__, __LINE__, which, *GPIO1_DATAIN);
67 if (which == 0)
68 return (*GPIO0_EXT_PORTA & (1<<9)) ? 1 : 0;
69 else
70 return 0;
71 }
15.4.4 测试
安装驱动程序之后执行测试程序,观察它的返回值(执行测试程序的同时操作按键):
# insmod button_drv.ko
# insmod board_rk3399.ko
# ./button_test /dev/xxxxxx_button0
15.4.5 课后作业
① 修改 board_rk3399.c,增加更多按键
② 修改 button_test.c,使用按键来点灯
15.5 IMX6ULL-QEMU的按键驱动程序(查询方式)
使用 QEMU模拟的硬件,它的硬件资源可以随意扩展。
在 IMX6ULL QEMU 虚拟开发板上,我们为它设计了 2个 按键。在 QEMU的 GUI上有 4个按键,右边的 2个留待以后用于电源管理。
15.5.1 先看原理图确定引脚及操作方法
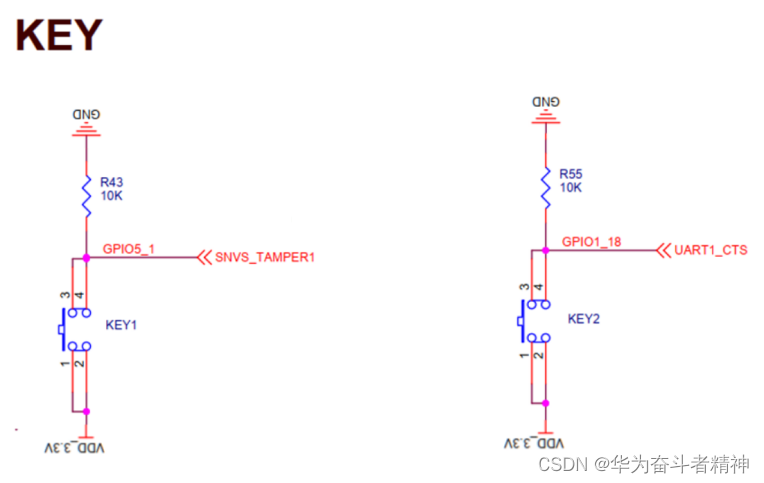
平时按键电平为低,按下按键后电平为高。 按键引脚为 GPIO5_IO01、GPIO1_IO18。
15.5.2 再看芯片手册确定寄存器及操作方法
步骤 1:
使能 GPIO1、GPIO5
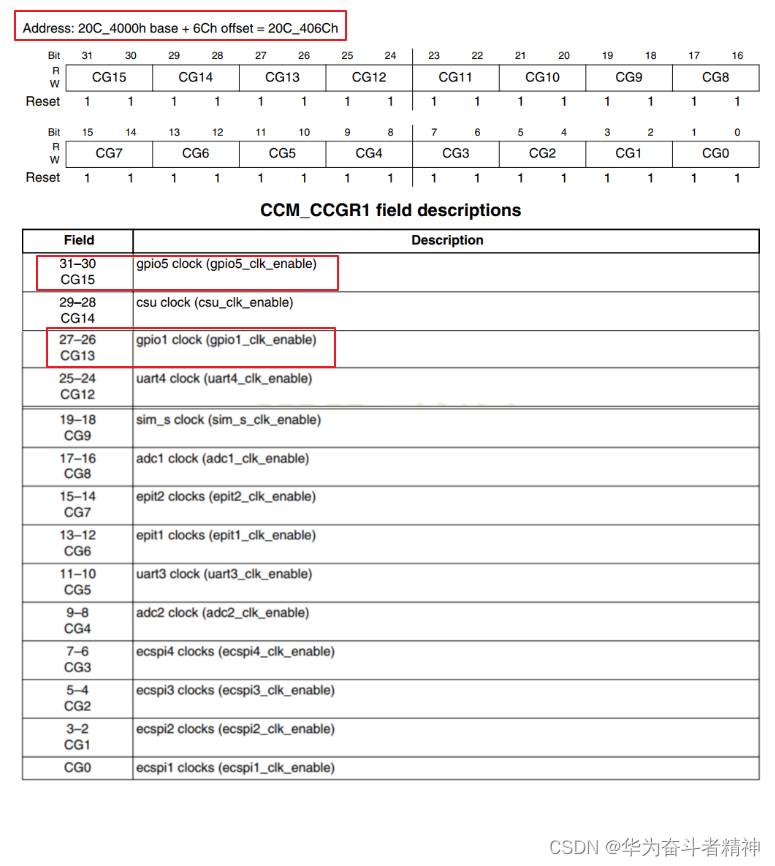
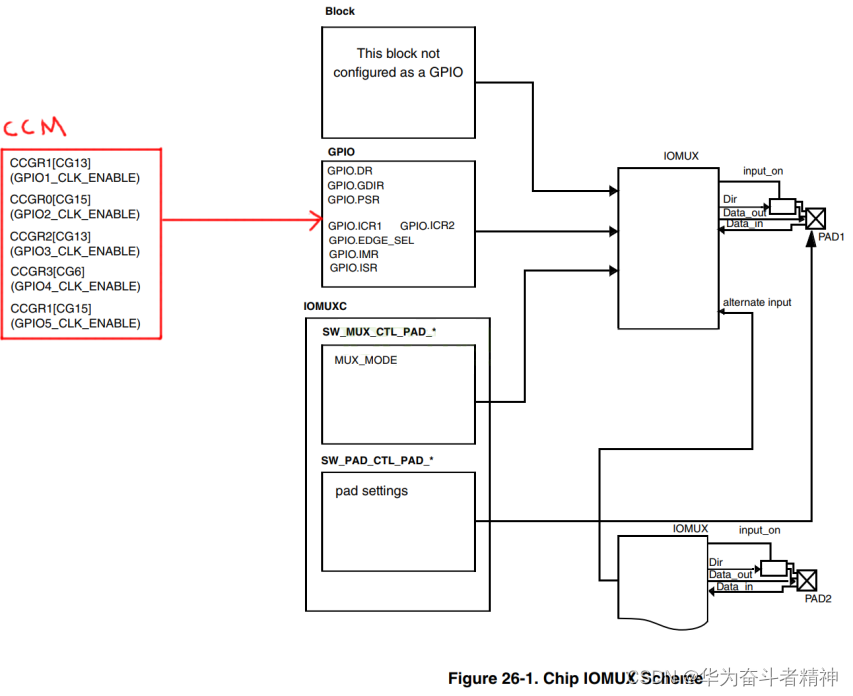
设置 b[31:30]、b[27:26]就可以使能 GPIO5、GPIO1,设置为什么值呢?
注意:在 imx6ullrm.pdf中,CCM_CCGR1的 b[31:30]是保留位;我以前写程序时错用了 imx6ul(不是imx6ull)的手册,导致程序中额外操作了这些保留位。不去设置 b[31:30],GPIO5也是默认使能的。
看下图,设置为 0b11:

① 00:该 GPIO模块全程被关闭
② 01:该 GPIO模块在 CPU run mode情况下是使能的;在 WAIT或 STOP模式下,关闭 ③ 10:保留
④ 11:该 GPIO模块全程使能
步骤 2:
设置 GPIO5_IO01、GPIO1_IO18为 GPIO模式
① 对于 GPIO5_IO01,设置如下寄存器:
② 对于 GPIO1_IO18,设置如下寄存器:
步骤 3:
设置 GPIO5_IO01、GPIO1_IO18为输入引脚,读取引脚电平 寄存器地址为:
设置方向寄存器,把引脚设置为输出引脚:
读取引脚状态寄存器,得到引脚电平:
15.5.3 编程
15.5.3.1 程序框架
使用 GIT下载所有源码后,本节源码位于如下目录:
01_all_series_quickstart\
05_嵌入式 Linux驱动开发基础知识\source\
04_button_drv\02_button_drv_for_boards\04_button_drv_for_xxxxxx_imx6ull-qemu
15.5.3.2 硬件相关的代码
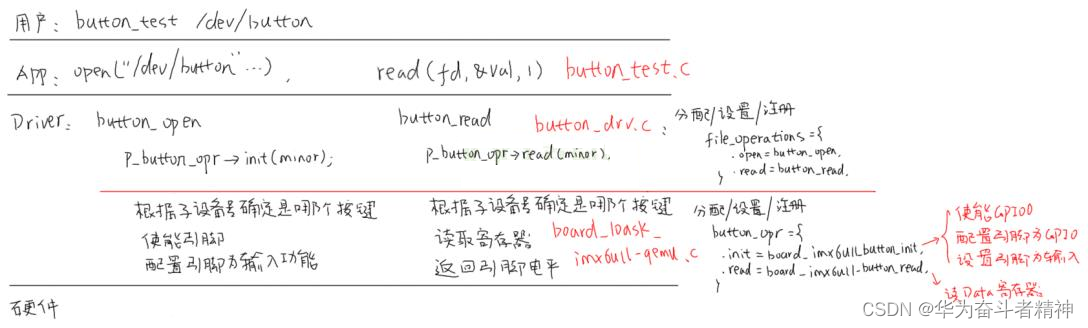
主要看 board_xxxxxx_imx6ull-qemu.c。
涉及的寄存器挺多,一个一个去执行 ioremap效率太低。
先定义结构体,然后对结构体指针进行 ioremap。
对于 IOMUXC,可以如下定义:
struct iomux {
volatile unsigned int unnames[23];
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO01;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO02;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO04;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO05;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO06;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO07;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO08;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO09;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_UART1_TX_DATA;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_UART1_RX_DATA;
volatile unsigned int IOMUXC_SW_MUX_CTL_PAD_UART1_CTS_B;
};
struct iomux *iomux = ioremap(0x20e0000, sizeof(struct iomux));
对于 GPIO,可以如下定义:
struct imx6ull_gpio {
volatile unsigned int dr;
volatile unsigned int gdir;
volatile unsigned int psr;
volatile unsigned int icr1;
volatile unsigned int icr2;
volatile unsigned int imr;
volatile unsigned int isr;
volatile unsigned int edge_sel;
};
struct imx6ull_gpio *gpio1 = ioremap(0x209C000, sizeof(struct imx6ull_gpio)); struct imx6ull_gpio *gpio5 = ioremap(0x20AC000, sizeof(struct imx6ull_gpio));
看一个驱动程序,先看它的入口函数,代码如下。
第 127行向上层驱动注册一个 button_operations结构体,该结构体在第 119~123行定义。 119 static struct button_operations
my_buttons_ops = {
120 .count = 2,
121 .init = board_imx6ull_button_init,
122 .read = board_imx6ull_button_read,
123 };
124
125 int board_imx6ull_button_drv_init(void)
126 {
127 register_button_operations(&my_buttons_ops);
128 return 0;
129 }
button_operations结构体中有 init函数指针,它指向 board_imx6ull_button_init函数,在里面将会初始化 LED引脚:使能、设置为 GPIO模式、设置为输出引脚。代码如下。
值得关注的是第 65~70行,对于寄存器要先使用 ioremap得到它的虚拟地址,以后使用虚拟地址访问寄存器。
50 /* enable GPIO1,GPIO5 */
51 static volatile unsigned int *CCM_CCGR1;
52
53 /* set GPIO5_IO03 as GPIO */
54 static volatile unsigned int *IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER1;
55
56 static struct iomux *iomux;
57
58 static struct imx6ull_gpio *gpio1;
59 static struct imx6ull_gpio *gpio5;
60
61 static void board_imx6ull_button_init (int which) /* 初始化 button, which-哪个 button */
62 {
63 if (!CCM_CCGR1)
64 {
65 CCM_CCGR1 = ioremap(0x20C406C, 4);
66 IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER1 = ioremap(0x229000C, 4); 67
68 iomux = ioremap(0x20e0000, sizeof(struct iomux));
69 gpio1 = ioremap(0x209C000, sizeof(struct imx6ull_gpio));
70 gpio5 = ioremap(0x20AC000, sizeof(struct imx6ull_gpio));
71 }
72
73 if (which == 0)
74 {
75 /* 1. enable GPIO5
76 * CG15, b[31:30] = 0b11
77 */
78 *CCM_CCGR1 |= (3<<30);
79
80 /* 2. set GPIO5_IO01 as GPIO
81 * MUX_MODE, b[3:0] = 0b101
82 */
83 *IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER1 = 5;
84
85 /* 3. set GPIO5_IO01 as input
86 * GPIO5 GDIR, b[1] = 0b0
87 */
88 gpio5->gdir &= ~(1<<1);
89 }
90 else if(which == 1)
91 {
92 /* 1. enable GPIO1
93 * CG13, b[27:26] = 0b11
94 */
95 *CCM_CCGR1 |= (3<<26);
96
97 /* 2. set GPIO1_IO18 as GPIO
98 * MUX_MODE, b[3:0] = 0b101
99 */
100 iomux->IOMUXC_SW_MUX_CTL_PAD_UART1_CTS_B = 5;
101
102 /* 3. set GPIO1_IO18 as input
103 * GPIO1 GDIR, b[18] = 0b0
104 */
105 gpio1->gdir &= ~(1<<18);
106 } 107
108 }
button_operations结构体中还有有 read函数指针,它指向 board_imx6ull_button_read函数,在里面将会读取并返回按键引脚的电平。代码如下。
110 static int board_imx6ull_button_read (int which) /* 读 button, which-哪个 */
111 {
112 //printk("%s %s line %d, button %d, 0x%x\n", __FILE__, __FUNCTION__, __LINE__, which, *GPIO1_DATAIN);
113 if (which == 0)
114 return (gpio5->psr & (1<<1)) ? 1 : 0;
115 else
116 return (gpio1->psr & (1<<18)) ? 1 : 0;
117 }
15.5.4 测试
先启动 IMX6ULL QEMU模拟器,挂载 NFS文件系统。
运行 QEMU时,
QEMU内部为主机虚拟出一个网卡, IP为 10.0.2.2,
IMX6ULL有一个网卡, IP为 10.0.2.15,
它连接到主机的虚拟网卡。
这样 IMX6ULL就可以通过 10.0.2.2去访问 Ubuntu了。
安装驱动程序之后执行测试程序,观察它的返回值(执行测试程序的同时操作按键):
# insmod button_drv.ko
# insmod board_drv.ko
# insmod board_xxxxxx_imx6ull-qemu.ko
# ./button_test /dev/xxxxxx_button0
# ./button_test /dev/xxxxxx_button1
15.5.5 课后作业
① 修改 button_test.c,使用按键来点灯
智能推荐
生活垃圾数据集(YOLO版)_垃圾回收数据集-程序员宅基地
文章浏览阅读1.6k次,点赞5次,收藏20次。【有害垃圾】:电池(1 号、2 号、5 号)、过期药品或内包装等;【可回收垃圾】:易拉罐、小号矿泉水瓶;【厨余垃圾】:小土豆、切过的白萝卜、胡萝卜,尺寸为电池大小;【其他垃圾】:瓷片、鹅卵石(小土豆大小)、砖块等。文件结构|----classes.txt # 标签种类|----data-txt\ # 数据集文件集合|----images\ # 数据集图片|----labels\ # yolo标签。_垃圾回收数据集
天气系统3------微服务_cityid=101280803-程序员宅基地
文章浏览阅读272次。之前写到 通过封装的API 已经可以做到使用redis进行缓存天气信息但是这一操作每次都由客户使用时才进行更新 不友好 所以应该自己实现半小时的定时存入redis 使用quartz框架 首先添加依赖build.gradle中// Quartz compile('org.springframework.boot:spring-boot-starter-quartz'..._cityid=101280803
python wxpython 不同Frame 之间的参数传递_wxpython frame.bind-程序员宅基地
文章浏览阅读1.8k次,点赞2次,收藏8次。对于使用触发事件来反应的按钮传递参数如下:可以通过lambda对function的参数传递:t.Bind(wx.EVT_BUTTON, lambda x, textctrl=t: self.input_fun(event=x, textctrl=textctrl))前提需要self.input_fun(self,event,t):传入参数而同时两个Frame之间的参数传..._wxpython frame.bind
cocos小游戏开发总结-程序员宅基地
文章浏览阅读1.9k次。最近接到一个任务要开发消消乐小游戏,当然首先就想到乐cocosCreator来作为开发工具。开发本身倒没有多少难点。消消乐的开发官网发行的书上有专门讲到。下面主要总结一下开发中遇到的问题以及解决方法屏幕适配由于设计尺寸是750*1336,如果适应高度,则在iphonX下,内容会超出屏幕宽度。按宽适应,iphon4下内容会超出屏幕高度。所以就需要根据屏幕比例来动态设置适配策略。 onLoad..._750*1336
ssm435银行贷款管理系统+vue_vue3重构信贷管理系统-程序员宅基地
文章浏览阅读745次,点赞21次,收藏21次。web项目的框架,通常更简单的数据源。21世纪的今天,随着社会的不断发展与进步,人们对于信息科学化的认识,已由低层次向高层次发展,由原来的感性认识向理性认识提高,管理工作的重要性已逐渐被人们所认识,科学化的管理,使信息存储达到准确、快速、完善,并能提高工作管理效率,促进其发展。论文主要是对银行贷款管理系统进行了介绍,包括研究的现状,还有涉及的开发背景,然后还对系统的设计目标进行了论述,还有系统的需求,以及整个的设计方案,对系统的设计以及实现,也都论述的比较细致,最后对银行贷款管理系统进行了一些具体测试。_vue3重构信贷管理系统
乌龟棋 题解-程序员宅基地
文章浏览阅读774次。题目描述原题目戳这里小明过生日的时候,爸爸送给他一副乌龟棋当作礼物。乌龟棋的棋盘是一行 NNN 个格子,每个格子上一个分数(非负整数)。棋盘第 111 格是唯一的起点,第 NNN 格是终点,游戏要求玩家控制一个乌龟棋子从起点出发走到终点。乌龟棋中 MMM 张爬行卡片,分成 444 种不同的类型( MMM 张卡片中不一定包含所有 444 种类型的卡片,见样例),每种类型的卡片上分别标有 1,2,3,41, 2, 3, 41,2,3,4 四个数字之一,表示使用这种卡片后,乌龟棋子将向前爬行相应的格子数
随便推点
python内存泄露的原因_Python服务端内存泄露的处理过程-程序员宅基地
文章浏览阅读1.5k次。吐槽内存泄露 ? 内存暴涨 ? OOM ?首先提一下我自己曾经历过多次内存泄露,到底有几次? 我自己心里悲伤的回想了下,造成线上影响的内存泄露事件有将近5次了,没上线就查出内存暴涨次数可能更多。这次不是最惨,相信也不会是最后的内存的泄露。有人说,内存泄露对于程序员来说,是个好事,也是个坏事。 怎么说? 好事在于,技术又有所长进,经验有所心得…. 毕竟不是所有程序员都写过OOM的服务…. 坏事..._python内存泄露
Sensor (draft)_draft sensor-程序员宅基地
文章浏览阅读747次。1.sensor typeTYPE_ACCELEROMETER=1 TYPE_MAGNETIC_FIELD=2 (what's value mean at x and z axis)TYPE_ORIENTATION=3TYPE_GYROSCOPE=4 TYPE_LIGHT=5(in )TYPE_PRESSURE=6TYPE_TEMPERATURE=7TYPE_PRO_draft sensor
【刘庆源码共享】稀疏线性系统求解算法MGMRES(m) 之 矩阵类定义三(C++)_gmres不构造矩阵-程序员宅基地
文章浏览阅读581次。/* * Copyright (c) 2009 湖南师范大学数计院 一心飞翔项目组 * All Right Reserved * * 文件名:matrix.cpp 定义Point、Node、Matrix类的各个方法 * 摘 要:定义矩阵类,包括矩阵的相关信息和方法 * * 作 者:刘 庆 * 修改日期:2009年7月19日21:15:12 **/
三分钟带你看完HTML5增强的【iframe元素】_iframe allow-top-navigation-程序员宅基地
文章浏览阅读1.7w次,点赞6次,收藏20次。HTML不再推荐页面中使用框架集,因此HTML5删除了<frameset>、<frame>和<noframes>这三个元素。不过HTML5还保留了<iframe>元素,该元素可以在普通的HTML页面中使用,生成一个行内框架,可以直接放在HTML页面的任意位置。除了指定id、class和style之外,还可以指定如下属性:src 指定一个UR..._iframe allow-top-navigation
Java之 Spring Cloud 微服务的链路追踪 Sleuth 和 Zipkin(第三个阶段)【三】【SpringBoot项目实现商品服务器端是调用】-程序员宅基地
文章浏览阅读785次,点赞29次,收藏12次。Zipkin 是 Twitter 的一个开源项目,它基于 Google Dapper 实现,它致力于收集服务的定时数据,以解决微服务架构中的延迟问题,包括数据的收集、存储、查找和展现。我们可以使用它来收集各个服务器上请求链路的跟踪数据,并通过它提供的 REST API 接口来辅助我们查询跟踪数据以实现对分布式系统的监控程序,从而及时地发现系统中出现的延迟升高问题并找出系统性能瓶颈的根源。除了面向开发的 API 接口之外,它也提供了方便的 UI 组件来帮助我们直观的搜索跟踪信息和分析请求链路明细,
烁博科技|浅谈视频安全监控行业发展_2018年8月由于某知名视频监控厂商多款摄像机存在安全漏洞-程序员宅基地
文章浏览阅读358次。“随着天网工程的建设,中国已经建成世界上规模最大的视频监控网,摄像头总 数超过2000万个,成为世界上最安全的国家。视频图像及配套数据已经应用在反恐维稳、治安防控、侦查破案、交通行政管理、服务民生等各行业各领域。烁博科技视频安全核心能力:精准智能数据采集能力:在建设之初即以应用需求为导向,开展点位选择、设备选型等布建工作,实现前端采集设备的精细化部署。随需而动的AI数据挖掘能力:让AI所需要的算力、算法、数据、服务都在应用需求的牵引下实现合理的调度,实现解析能力的最大化。完善的数据治理能力:面_2018年8月由于某知名视频监控厂商多款摄像机存在安全漏洞