Python基于OpenCV&YOLO台球击球路线规划系统(源码&部署教程)_桌球延长线源码-程序员宅基地
技术标签: python OpenCV 计算机视觉 目标检测 opencv
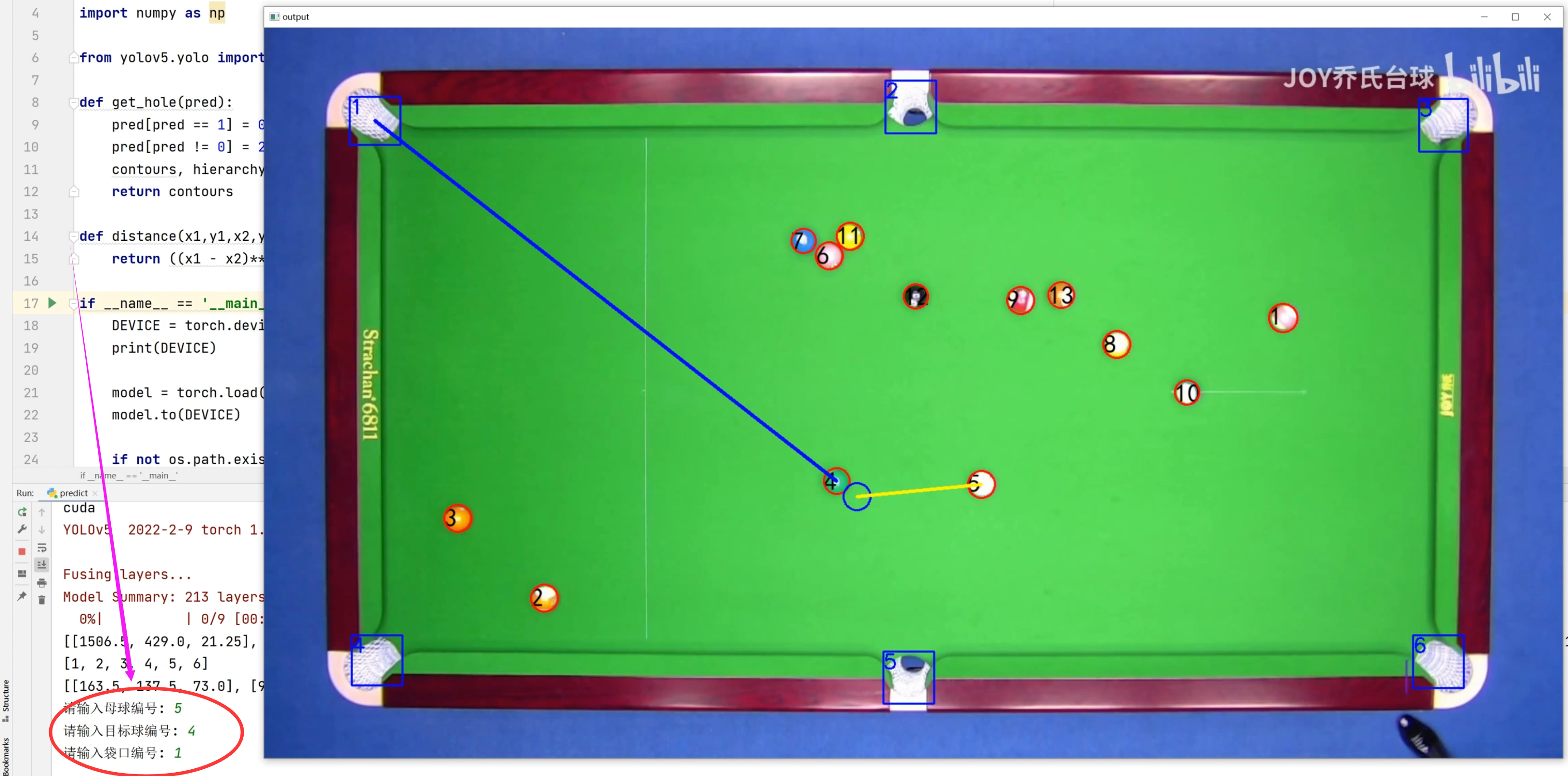
1.项目效果展示



2.视频演示
3.YOLOv7算法简介
YOLOv7 在 5 FPS 到 160 FPS 范围内,速度和精度都超过了所有已知的目标检测器
并在 GPU V100 上,30 FPS 的情况下达到实时目标检测器的最高精度 56.8% AP。YOLOv7 是在 MS COCO 数据集上从头开始训练的,不使用任何其他数据集或预训练权重。
相对于其他类型的工具,YOLOv7-E6 目标检测器(56 FPS V100,55.9% AP)比基于 transformer 的检测器 SWINL Cascade-Mask R-CNN(9.2 FPS A100,53.9% AP)速度上高出 509%,精度高出 2%,比基于卷积的检测器 ConvNeXt-XL Cascade-Mask R-CNN (8.6 FPS A100, 55.2% AP) 速度高出 551%,精度高出 0.7%。
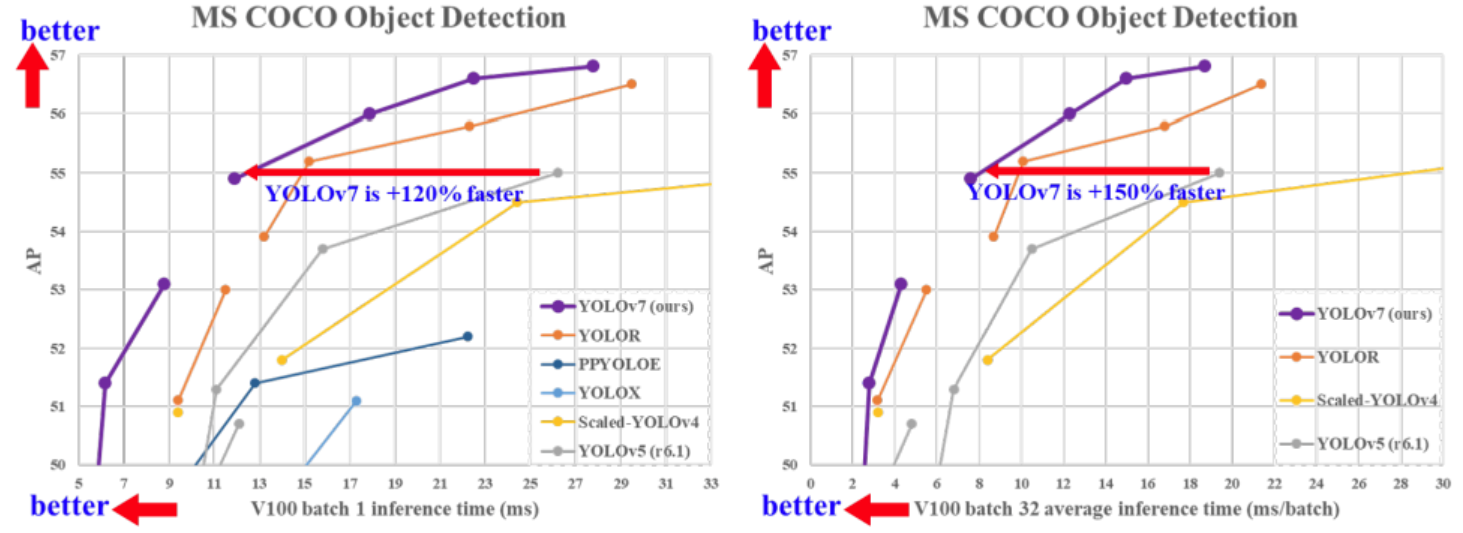
此外, YOLOv7 的在速度和精度上的表现也优于 YOLOR、YOLOX、Scaled-YOLOv4、YOLOv5、DETR 等多种目标检测器。
4.YOLOv7 技术方法
近年来,实时目标检测器仍在针对不同的边缘设备进行开发。例如,MCUNet 和 NanoDet 的开发专注于生产低功耗单芯片并提高边缘 CPU 的推理速度;YOLOX、YOLOR 等方法专注于提高各种 GPU 的推理速度;实时目标检测器的发展集中在高效架构的设计上;在 CPU 上使用的实时目标检测器的设计主要基于 MobileNet、ShuffleNet 或 GhostNet;为 GPU 开发的实时目标检测器则大多使用 ResNet、DarkNet 或 DLA,并使用 CSPNet 策略来优化架构。
YOLOv7 的发展方向与当前主流的实时目标检测器不同,研究团队希望它能够同时支持移动 GPU 和从边缘到云端的 GPU 设备。除了架构优化之外,该研究提出的方法还专注于训练过程的优化,将重点放在了一些优化模块和优化方法上。这可能会增加训练成本以提高目标检测的准确性,但不会增加推理成本。研究者将提出的模块和优化方法称为可训练的「bag-of-freebies」。
对于模型重参数化,该研究使用梯度传播路径的概念分析了适用于不同网络层的模型重参数化策略,并提出了有计划的重参数化模型。此外,研究者发现使用动态标签分配技术时,具有多个输出层的模型在训练时会产生新的问题:「如何为不同分支的输出分配动态目标?」针对这个问题,研究者提出了一种新的标签分配方法,称为从粗粒度到细粒度(coarse-to-fine)的引导式标签分配。
该研究的主要贡献包括:
(1) 设计了几种可训练的 bag-of-freebies 方法,使得实时目标检测可以在不增加推理成本的情况下大大提高检测精度;
(2) 对于目标检测方法的演进,研究者发现了两个新问题:一是重参数化的模块如何替换原始模块,二是动态标签分配策略如何处理分配给不同输出层的问题,并提出了解决这两个问题的方法;
(3) 提出了实时目标检测器的「扩充(extend)」和「复合扩展(compound scale)」方法,以有效地利用参数和计算;
(4) 该研究提出的方法可以有效减少 SOTA 实时目标检测器约 40% 的参数和 50% 的计算量,并具有更快的推理速度和更高的检测精度。
在大多数关于设计高效架构的文献中,人们主要考虑的因素包括参数的数量、计算量和计算密度。下图 2(b)中 CSPVoVNet 的设计是 VoVNet 的变体。CSPVoVNet 的架构分析了梯度路径,以使不同层的权重能够学习更多不同的特征,使推理更快、更准确。图 2 中的 ELAN 则考虑了「如何设计一个高效网络」的问题。
YOLOv7 研究团队提出了基于 ELAN 的扩展 E-ELAN,其主要架构如图所示。
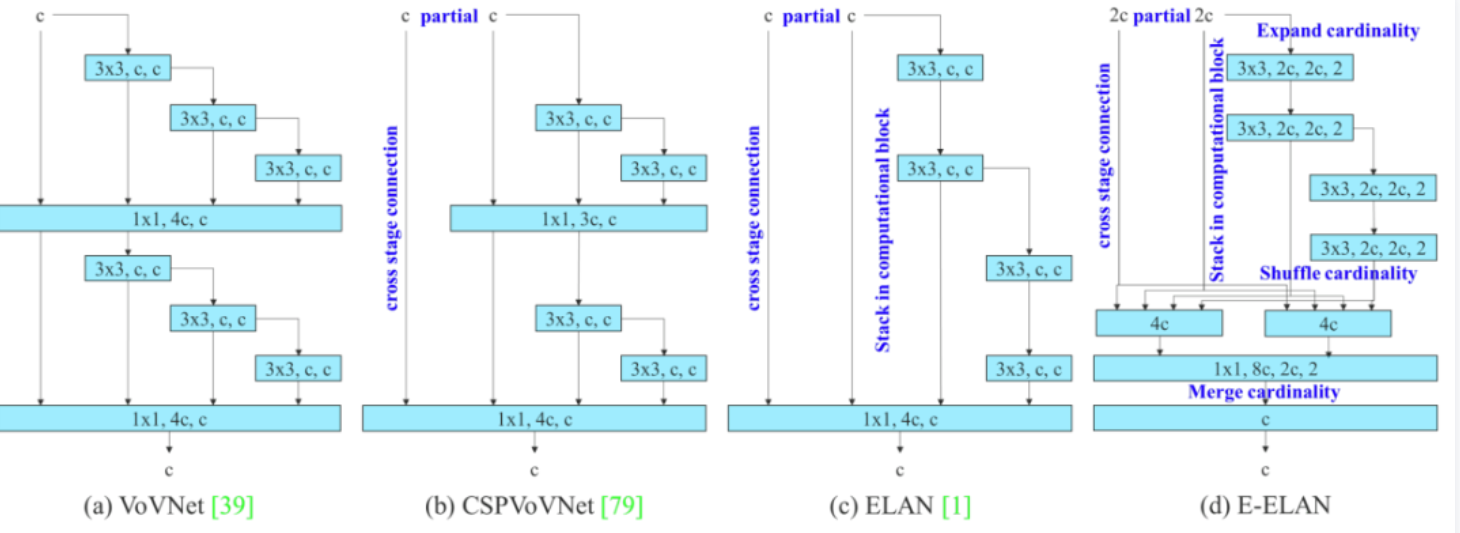
新的 E-ELAN 完全没有改变原有架构的梯度传输路径,其中使用组卷积来增加添加特征的基数(cardinality),并以 shuffle 和 merge cardinality 的方式组合不同组的特征。这种操作方式可以增强不同特征图学得的特征,改进参数的使用和计算效率。
无论梯度路径长度和大规模 ELAN 中计算块的堆叠数量如何,它都达到了稳定状态。如果无限堆叠更多的计算块,可能会破坏这种稳定状态,参数利用率会降低。新提出的 E-ELAN 使用 expand、shuffle、merge cardinality 在不破坏原有梯度路径的情况下让网络的学习能力不断增强。
在架构方面,E-ELAN 只改变了计算块的架构,而过渡层(transition layer)的架构完全没有改变。YOLOv7 的策略是使用组卷积来扩展计算块的通道和基数。研究者将对计算层的所有计算块应用相同的组参数和通道乘数。然后,每个计算块计算出的特征图会根据设置的组参数 g 被打乱成 g 个组,再将它们连接在一起。此时,每组特征图的通道数将与原始架构中的通道数相同。最后,该方法添加 g 组特征图来执行 merge cardinality。除了保持原有的 ELAN 设计架构,E-ELAN 还可以引导不同组的计算块学习更多样化的特征。
因此,对基于串联的模型,我们不能单独分析不同的扩展因子,而必须一起考虑。该研究提出图 (c),即在对基于级联的模型进行扩展时,只需要对计算块中的深度进行扩展,其余传输层进行相应的宽度扩展。这种复合扩展方法可以保持模型在初始设计时的特性和最佳结构。
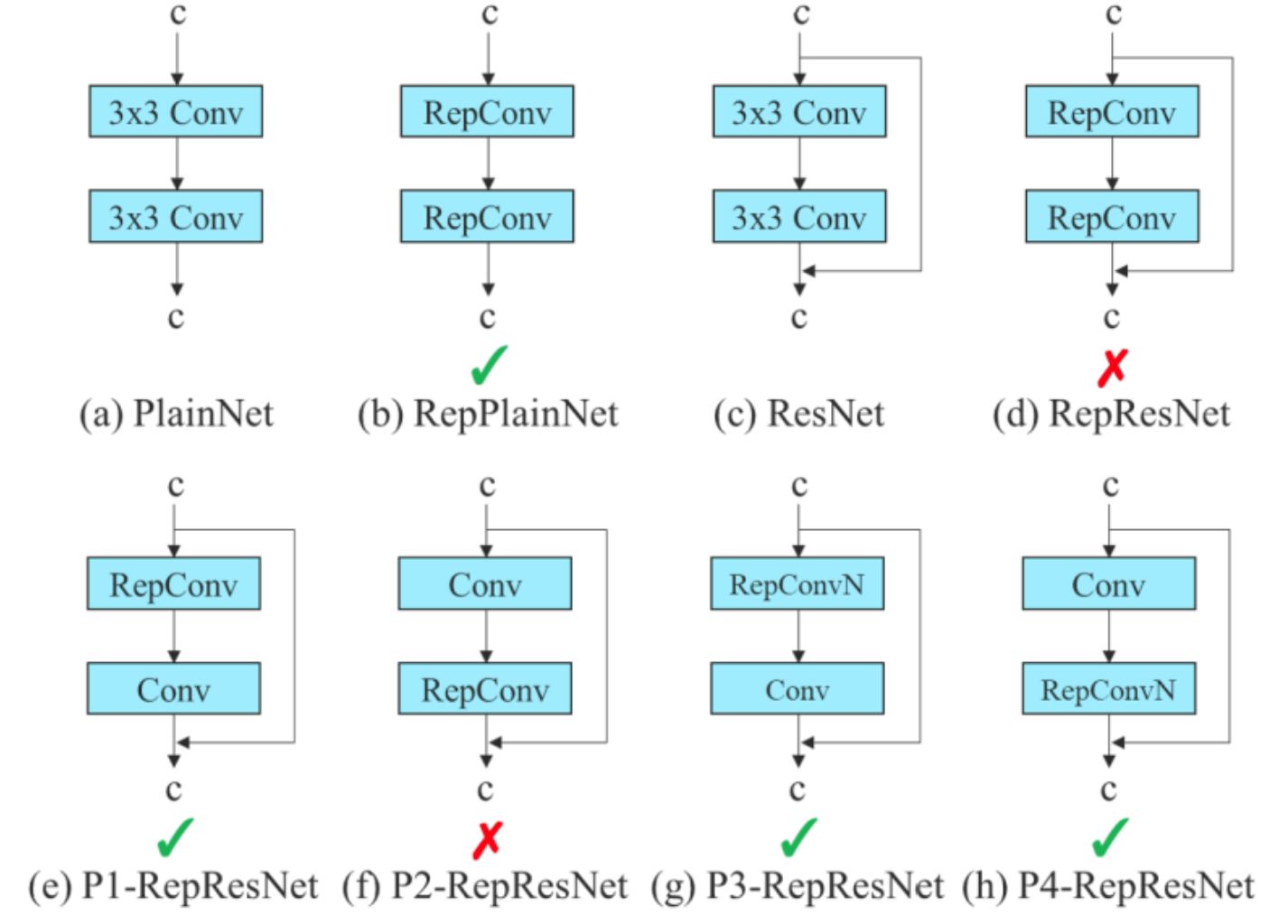
此外,该研究使用梯度流传播路径来分析如何重参数化卷积,以与不同的网络相结合。下图展示了该研究设计的用于 PlainNet 和 ResNet 的「计划重参数化卷积」。
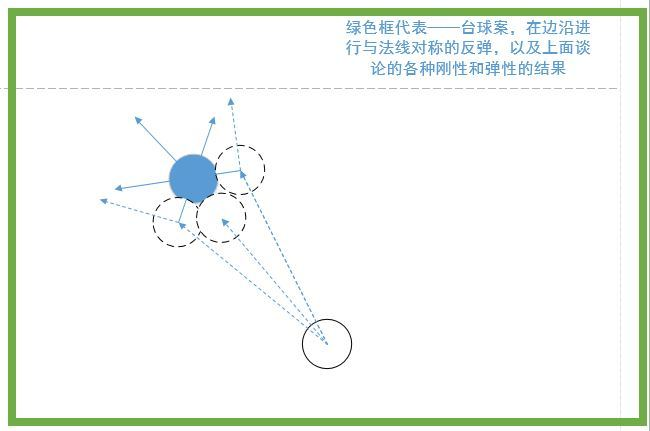
5.台球击球路线原理
(1)球路的选定
台球的瞄准方法,是根据力的直线传递原理,通过主球撞击目标球,目标球被撞击后,便沿着直线进入球袋。因为球台上有6个球袋,分别固定在四角和边岸中部,而球是可以在球台上到处滚动的,要想把其中某一个球打进球袋,必须在球群中观察选择,哪个球的球路、角度最合适、容易进袋,在袋口附近有一个目标球,要想使这个球进袋,便要先看看球路是否合适,然后由球袋口中心,通过目标球中心,划一条直线,这条直线便是目标球进袋要走的路线。
(2)目标球上的击点
因为目标球没有外力推动本身是不能滚动的,必须通过主球的撞击才行。根据力的直线传递原理,要把某个目标球打进球袋,不能随便乱撞目标球上的任何点位,必须根据目标球的进袋线路,确定主球应该撞击目标球上的击点位置,才能完成打球入袋。
由目标球所对着的球袋中心,经过目标球中心延长线,这条线和目标球外圆相交在M点,这个点便是目标球上的击点。
(3)瞄准点
目标球上的击点确定之后,接着要确定瞄准点的位置。从目标球上的击点M,再沿这条直线向后,量出一段与球的半径相等的长度,最远点T就是瞄准点。以T点为圆心划一个圆形虚线,这个圆球形表示主球要撞击目标球必须来到的位置,主球与目标球的外圆才能在M点相交,与目标球相撞击,主球上的力量便通过M点传递给目标球,使它沿目标球球路入袋。
6.整合代码实现
import torch, cv2, os, tqdm
import numpy as np
import numpy as np
from yolov5.yolo import YOLOV5_Detect, opt
def get_hole(pred):
pred[pred == 1] = 0
pred[pred != 0] = 255
contours, hierarchy = cv2.findContours(pred[:, :, 0], cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
return contours
def distance(x1,y1,x2,y2):
return ((x1 - x2)**2+(y1 - y2)**2)**0.5
if __name__ == '__main__':
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(DEVICE)
model = torch.load('model.pkl')
model.to(DEVICE)
if not os.path.exists('output'):
os.mkdir('output')
path = 'detect'
yolo_detect = YOLOV5_Detect(**vars(opt))
for i in tqdm.tqdm(os.listdir(path)):
# 读取图像
ori_img = cv2.imdecode(np.fromfile('{}/{}'.format(path, i), np.uint8), cv2.IMREAD_COLOR)
yolov5_res,balllist,ballvalue = yolo_detect.detect(ori_img)
# 记录原图尺寸
img_shape = ori_img.shape
# Resize到训练大小 640*320
img_ = cv2.resize(ori_img, (640, 320))
# 转换通道 归一化
img = np.transpose(np.expand_dims(img_, axis=0), (0, 3, 1, 2)) / 255.0
# 转换成tensor格式
img = torch.from_numpy(img).to(DEVICE).float()
# 预测
pred = np.argmax(model(img).cpu().detach().numpy()[0], axis=0)
# 1 2 对应着目标类别
pred_mask = []
for j in pred.reshape((-1)):
if j == 0:
pred_mask.append(np.array([0, 0, 0]))
elif j == 1:
pred_mask.append(np.array([0, 0, 255]))
elif j == 2:
pred_mask.append(np.array([255, 0, 0]))
pred_mask = np.array(pred_mask, dtype=np.uint8).reshape((pred.shape[0], pred.shape[1], 3))
pred = np.expand_dims(pred, axis=-1)
pred = np.repeat(pred, axis=-1, repeats=3)
pred = np.array(pred, dtype=np.uint8)
pred = cv2.resize(pred, (img_shape[1], img_shape[0]), interpolation=cv2.INTER_NEAREST)
pred_mask = cv2.resize(pred_mask, (img_shape[1], img_shape[0]), interpolation=cv2.INTER_NEAREST)
contours = get_hole(pred)
pred[pred == 0] = 255
pred[pred != 255] = 0
yolov5_res = yolov5_res & pred
# yolov5_res = cv2.addWeighted(yolov5_res, 0.5, pred_mask, 0.5, 0)
# ori_img = yolov5_res & pred
holes_coordinate = []
radius = 0
number = 0
for cnts in contours:
x, y, w, h = cv2.boundingRect(cnts)
holes_coordinate.append([x, y, w, h])
radius = radius + (w + h)/2
number = number + 1
holllist = []
hollvalue = []
holes_coordinate = sorted(holes_coordinate, key=lambda x:x[2] * x[3], reverse=True)[:6]
holes_coordinate = sorted(holes_coordinate, key=lambda x:x[1])
for idx, (x, y, w, h) in enumerate(sorted(holes_coordinate[:3], key=lambda x:x[0])):
cv2.rectangle(yolov5_res, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.putText(yolov5_res, '{:.0f}'.format(idx + 1),
(x, y + 25), cv2.FONT_HERSHEY_SIMPLEX, 1.0,
(255, 0, 0), 2)
holllist.append(idx + 1)
hollvalue.append([x + w / 2, y + h / 2, (w + h) / 2])
#print('hole {} x_center:{:.2f} y_center:{:.2f} radius:{:.2f}'.format(idx + 1, x + w / 2, y + h / 2, (w + h) / 2))
for idx, (x, y, w, h) in enumerate(sorted(holes_coordinate[3:], key=lambda x:x[0])):
cv2.rectangle(yolov5_res, (x, y), (x + w, y + h), (255, 0, 0), 2)
cv2.putText(yolov5_res, '{:.0f}'.format(idx + 4),
(x, y + 25), cv2.FONT_HERSHEY_SIMPLEX, 1.0,
(255, 0, 0), 2)
holllist.append(idx + 4)
hollvalue.append([x + w / 2, y + h / 2, (w + h) / 2])
#print('hole {} x_center:{:.2f} y_center:{:.2f} radius:{:.2f}'.format(idx + 4, x + w / 2, y + h / 2, (w + h) / 2))
for m in range(len(balllist)):
cv2.circle(yolov5_res, (int(ballvalue[m][0]),int(ballvalue[m][1])), int(ballvalue[m][2]), [0,0,255], 2)
cv2.imshow('input', yolov5_res)
cv2.waitKey(0)
print(balllist)
print(ballvalue)
print(holllist)
print(hollvalue)
a = input("请输入母球编号: ")
b = input("请输入目标球编号: ")
c = input("请输入袋口编号: ")
x1 = int(ballvalue[balllist.index(int(a))][0])
y1 = int(ballvalue[balllist.index(int(a))][1])
r1 = int(ballvalue[balllist.index(int(a))][2])
x2 = int(ballvalue[balllist.index(int(b))][0])
y2 = int(ballvalue[balllist.index(int(b))][1])
r2 = int(ballvalue[balllist.index(int(b))][2])
x3 = int(hollvalue[holllist.index(int(c))][0])
y3 = int(hollvalue[holllist.index(int(c))][1])
r3 = int(hollvalue[holllist.index(int(c))][2])
#画出目标球的可能行进路线:
def drawline(yolov5_res,x1,y1,x2,y2,r):
gen = ((x2-x1)**2+(y2-y1)**2)**0.5
x3 = int(x1 - (y2-y1)*r/gen)
y3 = int(y1 + (x2-x1)*r/gen)
x4 = int(x2 - (y2-y1)*r/gen)
y4 = int(y2 + (x2-x1)*r/gen)
x5 = int(x1 + (y2 - y1) * r / gen)
y5 = int(y1 - (x2 - x1) * r / gen)
x6 = int(x2 + (y2 - y1) * r / gen)
y6 = int(y2 - (x2 - x1) * r / gen)
cv2.line(yolov5_res, (x3, y3), (x4, y4), (255, 255, 255), 3)
cv2.line(yolov5_res, (x5, y5), (x6, y6), (255, 255, 255), 3)
return yolov5_res
cv2.line(yolov5_res,(x2,y2),(x3,y3),(255, 0, 0),3)
yolov5_res = drawline(yolov5_res,x2,y2,x3,y3,r2)
#画出撞击点
xz = int(x3 + (x2 - x3)*((r1+r2) + distance(x2,y2,x3,y3))/(distance(x2,y2,x3,y3)))
yz = int(y3 + (y2 - y3)*((r1+r2) + distance(x2,y2,x3,y3))/(distance(x2,y2,x3,y3)))
cv2.circle(yolov5_res, (xz,yz), int(ballvalue[balllist.index(int(a))][2]), [255, 0, 0], 2)
#画出母球的行进路线
cv2.line(yolov5_res, (xz, yz), (x1, y1), (255, 0, 0), 3)
yolov5_res = drawline(yolov5_res, xz, yz, x1, y1,r1)
cv2.imshow('output',yolov5_res)
cv2.waitKey(0)
#cv2.imwrite('output/{}'.format(i), yolov5_res)
7.项目文件展示
智能推荐
尚硅谷_谷粒学苑-微服务+全栈在线教育实战项目之旅_基于微服务的在线教育平台尚硅谷-程序员宅基地
文章浏览阅读2.7k次,点赞3次,收藏11次。SpringBoot+Maven+MabatisPlusmaven在新建springboot项目引入RELEASE版本出错maven在新建springboot项目引入RELEASE版本出错maven详解maven就是通过pom.xml中的配置,就能够从仓库获取到想要的jar包。仓库分为:本地仓库、第三方仓库(私服)、中央仓库springframework.boot:spring-boot-starter-parent:2.2.1.RELEASE’ not found若出现jar包下载不了只有两_基于微服务的在线教育平台尚硅谷
java 实现 数据库备份_java数据备份-程序员宅基地
文章浏览阅读1k次。数据库备份的方法第一种:使用mysqldump结合exec函数进行数据库备份操作。第二种:使用php+mysql+header函数进行数据库备份和下载操作。下面 java 实现数据库备份的方法就是第一种首先我们得知道一些mysqldump的数据库备份语句备份一个数据库格式:mysqldump -h主机名 -P端口 -u用户名 -p密码 --database 数据库名 ..._java数据备份
window10_ffmpeg调试环境搭建-编译64位_win10如何使用mingw64编译ffmpeg-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏14次。window10_ffmpeg调试环境搭建_win10如何使用mingw64编译ffmpeg
《考试脑科学》_考试脑科学pdf百度网盘下载-程序员宅基地
文章浏览阅读6.3k次,点赞9次,收藏14次。给大家推荐《考试脑科学》这本书。作者介绍:池谷裕二,日本东京大学药学系研究科教授,脑科学研究者。1970年生于日本静冈县,1998年取得日本东京大学药学博士学位,2002年起担任美国哥伦比亚大学客座研究员。专业为神经科学与药理学,研究领域为人脑海马体与大脑皮质层的可塑性。现为东京大学药学研究所教授,同时担任日本脑信息通信融合研究中心研究主任,日本药理学会学术评议员、ERATO人脑与AI融合项目负责人。2008年获得日本文部大臣表彰青年科学家奖,2013年获得日本学士院学术奖励奖。这本书作者用非常通俗易懂_考试脑科学pdf百度网盘下载
今天给大家介绍一下华为智选手机与华为手机的区别_华为智选手机和华为手机的区别-程序员宅基地
文章浏览阅读1.4k次。其中,成都鼎桥通信技术有限公司是一家专业从事移动通讯终端产品研发和生产的高科技企业,其发布的TD Tech M40也是华为智选手机系列中的重要代表之一。华为智选手机是由华为品牌方与其他公司合作推出的手机产品,虽然其机身上没有“华为”标识,但是其品质和技术水平都是由华为来保证的。总之,华为智选手机是由华为品牌方和其他公司合作推出的手机产品,虽然外观上没有“华为”标识,但其品质和技术水平都是由华为来保证的。华为智选手机采用了多种处理器品牌,以满足不同用户的需求,同时也可以享受到华为全国联保的服务。_华为智选手机和华为手机的区别
c++求n个数中的最大值_n个数中最大的那个数在哪里?输出其位置,若有多个最大数则都要输出。-程序员宅基地
文章浏览阅读7.6k次,点赞6次,收藏17次。目录题目描述输入输出代码打擂法数组排序任意输入n个整数,把它们的最大值求出来.输入只有一行,包括一个整数n(1_n个数中最大的那个数在哪里?输出其位置,若有多个最大数则都要输出。
随便推点
Linux常用命令_ls-lmore-程序员宅基地
文章浏览阅读4.8k次,点赞17次,收藏51次。Linux的命令有几百个,对程序员来说,常用的并不多,考虑各位是初学者,先学习本章节前15个命令就可以了,其它的命令以后用到的时候再学习。1、开机 物理机服务器,按下电源开关,就像windows开机一样。 在VMware中点击“开启此虚拟机”。2、登录 启动完成后,输入用户名和密码,一般情况下,不要用root用户..._ls-lmore
MySQL基础命令_mysql -u user-程序员宅基地
文章浏览阅读4.1k次。1.登录MYSQL系统命令打开DOS命令框shengfen,以管理员的身份运行命令1:mysql -u usernae -p password命令2:mysql -u username -p password -h 需要连接的mysql主机名(localhost本地主机名)或是mysql的ip地址(默认为:127.0.0.1)-P 端口号(默认:3306端口)使用其中任意一个就OK,输入命令后DOS命令框得到mysql>就说明已经进入了mysql系统2. 查看mysql当中的._mysql -u user
LVS+Keepalived使用总结_this is the redundant configuration for lvs + keep-程序员宅基地
文章浏览阅读484次。一、lvs简介和推荐阅读的资料二、lvs和keepalived的安装三、LVS VS/DR模式搭建四、LVS VS/TUN模式搭建五、LVS VS/NAT模式搭建六、keepalived多种real server健康检测实例七、lvs持久性工作原理和配置八、lvs数据监控九、lvs+keepalived故障排除一、LVS简介和推荐阅读的资料 学习LVS+Keepalived必须阅读的三个文档。1、 《Keepalived权威指南》下载见http://..._this is the redundant configuration for lvs + keepalived server itself
Android面试官,面试时总喜欢挖基础坑,整理了26道面试题牢固你基础!(3)-程序员宅基地
文章浏览阅读795次,点赞20次,收藏15次。AIDL是使用bind机制来工作。java原生参数Stringparcelablelist & map 元素 需要支持AIDL其实Android开发的知识点就那么多,面试问来问去还是那么点东西。所以面试没有其他的诀窍,只看你对这些知识点准备的充分程度。so,出去面试时先看看自己复习到了哪个阶段就好。下图是我进阶学习所积累的历年腾讯、头条、阿里、美团、字节跳动等公司2019-2021年的高频面试题,博主还把这些技术点整理成了视频和PDF(实际上比预期多花了不少精力),包含知识脉络 + 诸多细节。
机器学习-数学基础02补充_李孟_新浪博客-程序员宅基地
文章浏览阅读248次。承接:数据基础02
短沟道效应 & 窄宽度效应 short channel effects & narrow width effects-程序员宅基地
文章浏览阅读2.8w次,点赞14次,收藏88次。文章目录1. 概念:Narrow Width Effect: 窄宽度效应Short Channel effects:短沟道效应阈值电压 (Threshold voltage)2. 阈值电压与沟道长和沟道宽的关系:Narrow channel 窄沟的分析Short channel 短沟的分析1. 概念:Narrow Width Effect: 窄宽度效应在CMOS器件工艺中,器件的阈值电压Vth 随着沟道宽度的变窄而增大,即窄宽度效应;目前,由于浅沟道隔离工艺的应用,器件的阈值电压 Vth 随着沟道宽度_短沟道效应