STM32F103C8T6+I2C+DMA读取陀螺仪模块JY901S(硬件I2C_i2c dma stm32-程序员宅基地
技术标签: c语言
1.背景
笔者曾使用过6轴陀螺仪模块mpu6050模块,发现有一个很严重的零飘问题,也查阅过网上的许多方法,比如延缓等,均解决不了问题,于是就把问题归结于是那个模块只有6轴,所以现更换成9轴陀螺仪--jy901s模块,发现仍有零飘,不过比mpu6050好多了,于是笔者又发现一款HWT101CT陀螺仪模块,这个计划以后试试。
总:mpu6050 -------- 零飘 10°左右;
jy901s -------- 零飘 2° 左右;
HWT101CT -------- 待测,不过个人感觉基本为0。
2.部分代码
(1)JY901S.c代码
#include "stm32f10x.h" // Device header
#include "JY901S.h"
#include "JY901S_Reg.h"
#define JY901S_ADDRESS 0xa0
unsigned char yawAngle[2];
int flag = 0;
void MyDMA_Transfer(int BufferSize_DMA) //单次传输模式下,重装DMA_BufferSize,需先失能DMA通道
{
DMA_Cmd(DMA1_Channel5, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel5, BufferSize_DMA);
DMA_Cmd(DMA1_Channel5, ENABLE);
while (DMA_GetFlagStatus(DMA1_FLAG_TC5) == RESET);
DMA_ClearFlag(DMA1_FLAG_TC5);
}
void JY901S_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
{
uint32_t Timeout;
Timeout = 10000;
while (I2C_CheckEvent(I2Cx, I2C_EVENT) != SUCCESS)
{
Timeout --;
if (Timeout == 0)
{
break;
}
}
}
void JY901S_WriteReg(uint8_t RegAddress, uint8_t Data)
{
I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Transmitter);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6
I2C_SendData(I2C2, RegAddress);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTING);//EV8
I2C_SendData(I2C2, Data);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2
I2C_GenerateSTOP(I2C2, ENABLE);
}
void JY901S_ReadReg(uint8_t RegAddress)
{
int8_t length;
I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Transmitter);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6
I2C_SendData(I2C2, RegAddress);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2
I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Receiver);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//EV6
if(flag != 0)MyDMA_Transfer(2);
for(int8_t count=0;count<length;count++){
if(count!=length-1)
{
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
else{
I2C_AcknowledgeConfig(I2C2, DISABLE);
I2C_GenerateSTOP(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
}
flag ++;
}
void JY901S_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP ;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_ClockSpeed = 50000;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Cmd(I2C2, ENABLE);
DMA_InitTypeDef DMA_InitStructure;
DMA_DeInit(DMA1_Channel5);
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&(I2C2->DR);
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)yawAngle;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = 2; // 偏航角寄存器是2字节
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //地址自增
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //DMA_PeripheralDataSize_Byte 字节int_8; DMA_PeripheralDataSize_HalfWord int_16; DMA_PeripheralDataSize_Word int_32
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal; //DMA_Mode_Normal 单次传输; DMA_Mode_Circular 循环传输;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA_M2M_Disable 硬件触发;有时机选择 DMA_M2M_Enable 软件触发;(寄存器到寄存器) 软件触发:以最快速度搬运完
//硬件触发条件:计数不为0(DMA_BufferSize);有触发源;使能对应通道。
DMA_Init(DMA1_Channel5, &DMA_InitStructure);
// 使能DMA1通道5
DMA_Cmd(DMA1_Channel5, ENABLE);
// 启动DMA传输
I2C_DMACmd(I2C2, ENABLE);
}
(2)JY901S.h代码
#ifndef __JY901S_H
#define __JY901S_H
extern unsigned char yawAngle[2];
void MyDMA_Transfer(int BufferSize_DMA);
void JY901S_WaitEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT);
void JY901S_WriteReg(uint8_t RegAddress, uint8_t Data);
void JY901S_ReadReg(uint8_t RegAddress);
void JY901S_Init(void);
#endif
(3)JY901S_REG代码
#ifndef __JY901S_REG_H
#define __JY901S_REG_H
#define SAVE 0x00
#define CALSW 0x01
#define RSW 0x02
#define RRATE 0x03
#define BAUD 0x04
#define AXOFFSET 0x05
#define AYOFFSET 0x06
#define AZOFFSET 0x07
#define GXOFFSET 0x08
#define GYOFFSET 0x09
#define GZOFFSET 0x0a
#define HXOFFSET 0x0b
#define HYOFFSET 0x0c
#define HZOFFSET 0x0d
#define D0MODE 0x0e
#define D1MODE 0x0f
#define D2MODE 0x10
#define D3MODE 0x11
#define D0PWMH 0x12
#define D1PWMH 0x13
#define D2PWMH 0x14
#define D3PWMH 0x15
#define D0PWMT 0x16
#define D1PWMT 0x17
#define D2PWMT 0x18
#define D3PWMT 0x19
#define IICADDR 0x1a
#define LEDOFF 0x1b
#define GPSBAUD 0x1c
#define YYMM 0x30
#define DDHH 0x31
#define MMSS 0x32
#define MS 0x33
#define AX 0x34
#define AY 0x35
#define AZ 0x36
#define GX 0x37
#define GY 0x38
#define GZ 0x39
#define HX 0x3a
#define HY 0x3b
#define HZ 0x3c
#define Roll 0x3d
#define Pitch 0x3e
#define Yaw 0x3f
#define TEMP 0x40
#define D0Status 0x41
#define D1Status 0x42
#define D2Status 0x43
#define D3Status 0x44
#define PressureL 0x45
#define PressureH 0x46
#define HeightL 0x47
#define HeightH 0x48
#define LonL 0x49
#define LonH 0x4a
#define LatL 0x4b
#define LatH 0x4c
#define GPSHeight 0x4d
#define GPSYAW 0x4e
#define GPSVL 0x4f
#define GPSVH 0x50
#define DIO_MODE_AIN 0
#define DIO_MODE_DIN 1
#define DIO_MODE_DOH 2
#define DIO_MODE_DOL 3
#define DIO_MODE_DOPWM 4
#define DIO_MODE_GPS 5
#endif
(4)main.c代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "JY901S.h"
#include "JY901S_Reg.h"
float Z_Angle;
int main(void)
{
OLED_Init();
JY901S_Init();
while (1)
{
JY901S_ReadReg(Yaw);
Z_Angle = ((yawAngle[1] << 8) | yawAngle[0])*180/32768;
OLED_ShowHexNum(3, 3, yawAngle[1], 2);
OLED_ShowHexNum(3, 5, yawAngle[0], 2);
OLED_ShowSignedNum(2, 8, Z_Angle, 6);
Delay_ms(1000);
}
}
3.代码分析
(1)配置代码分析
首先,我们要配置及初始化我们的外设资源。
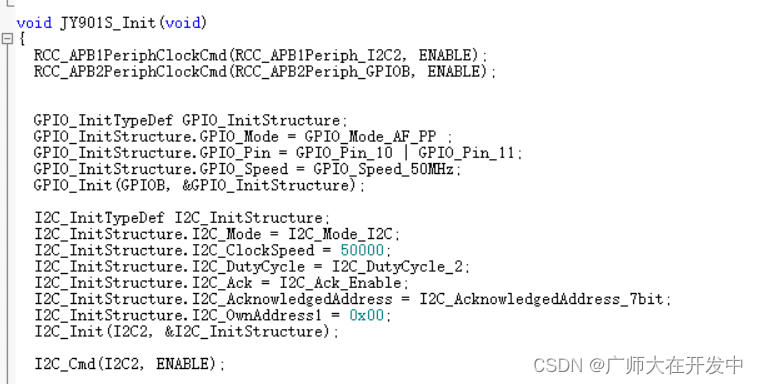
开启时钟,配置GPIO口、外设,使能,这些都是常规操作,我就不多说了。
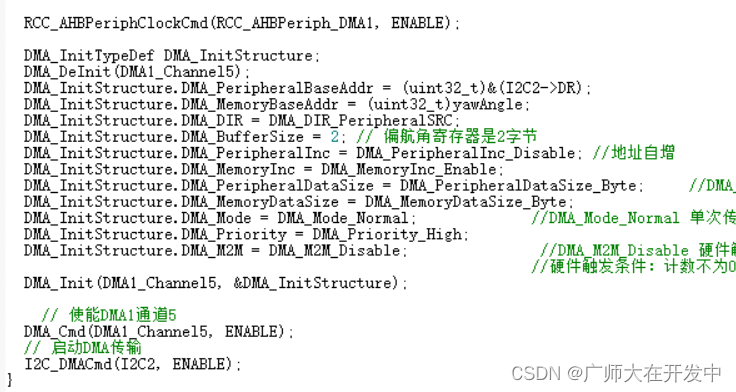
然后开启DMA时钟,说明一下,stm32f103c8t6只有DMA1,没有DMA2!
然后就配置DMA1_Channel5,注意,每种外设都只会对应唯一的DMA通道!参照下图。
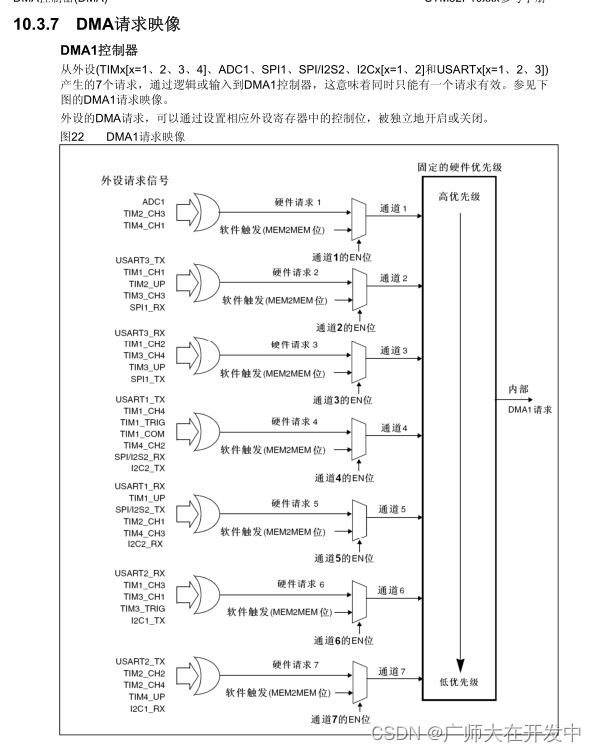
我这里使用的是I2C2_RX,故请求通道5,即DMA1_Channel5。
其他配置我都有注释,不会再评论区交流!
(2)I2C及DMA工作逻辑代码分析
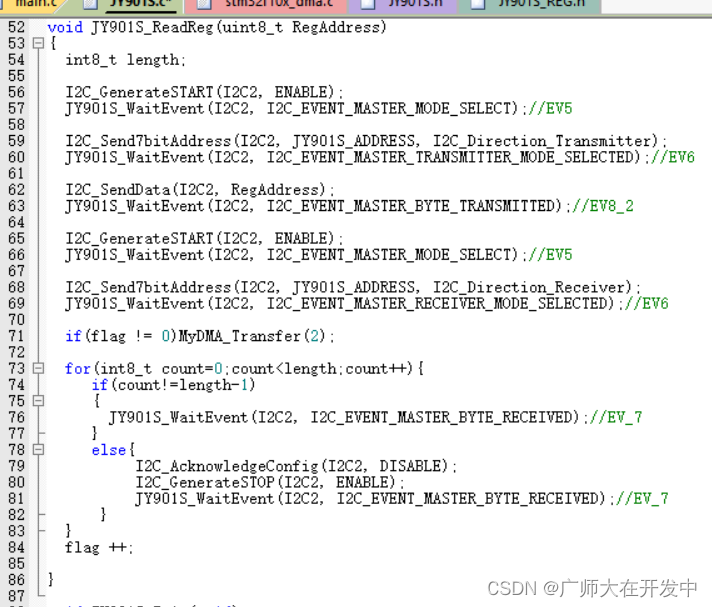
这个是读取相应寄存器封装的函数,其传参为读取寄存器的地址。
对照I2C通信协议图:
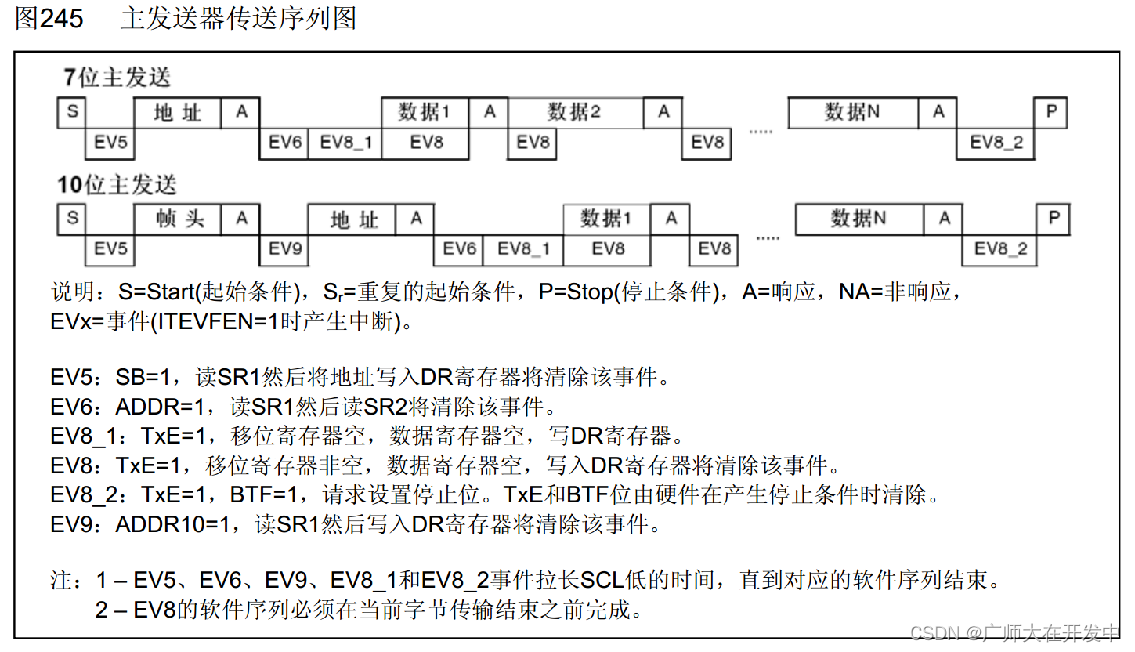
可以得出,读取从机相应寄存器的逻辑是
1. I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
产生I2C起始条件,并等待EV5事件。
(说明为什么要有等待事件:读取从机寄存器的值刷回stm32的移位寄存器,再移入数据寄存器等待搬运,事件恰是移位寄存器状态的标志,标志移位寄存器上是否已经移出上一个字节的数据,我要移入下一个字节的数据,数据寄存器同理)
2. I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Transmitter);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED);//EV6
向从机发送(从机地址左移一位),确认对象无误,并等待EV6事件。
I2C_Direction_Transmitter为写。
因为使用的是7位地址,而一个字节为8位,所以可以把从机地址左移一位,第八位作为确定读写位,这设计思路真的强!!!,故我把宏地址赋值为0xa0,而不是0x50。

0x50 0101 0000 0xa0 1010 0000
即0xa0 = (0x50 << 1)
3. I2C_SendData(I2C2, RegAddress);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_TRANSMITTED);//EV8_2
向从机写入读取寄存器的地址,并等待"写结束"事件EV8_2。
为什么?有什么用?
作用:把从机数据寄存器的指针指向相应得寄存器下,等一下第6步读到的数据便是这个指针指向的值。
4. I2C_GenerateSTART(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_MODE_SELECT);//EV5
产生重开始I2C起始条件,并等待EV5事件。
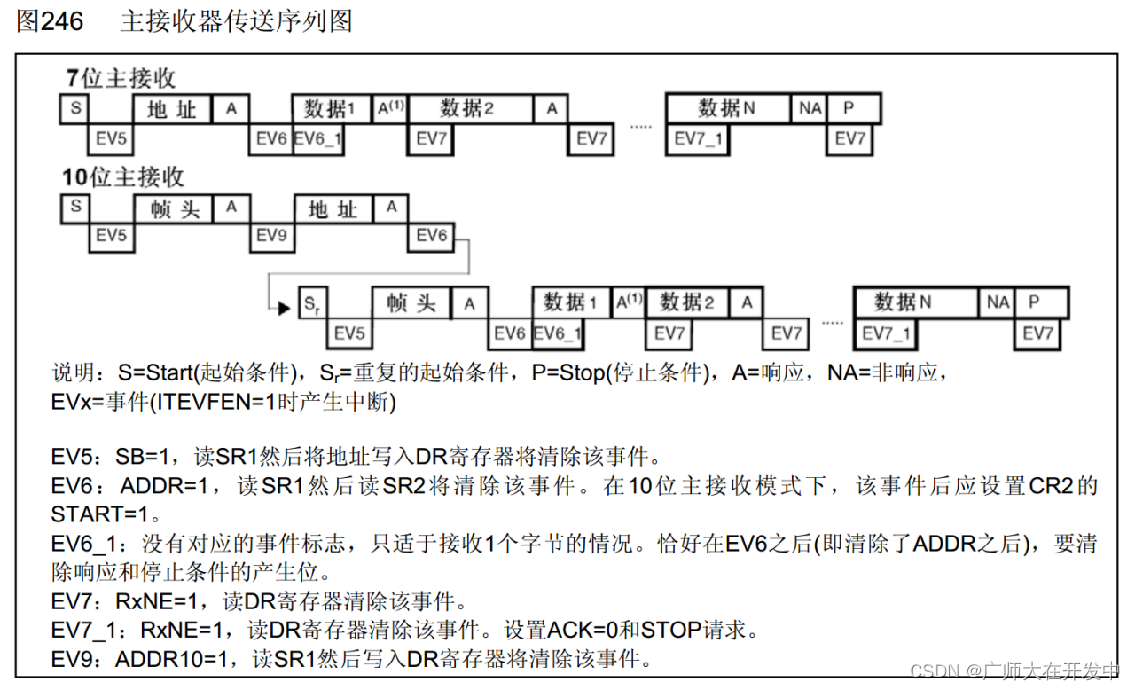
5. I2C_Send7bitAddress(I2C2, JY901S_ADDRESS, I2C_Direction_Receiver);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED);//EV6
向从机发送读指令,并等待EV6事件。
6.
void MyDMA_Transfer(int BufferSize_DMA) //单次传输模式下,重装DMA_BufferSize,需先失能DMA通道
{
DMA_Cmd(DMA1_Channel5, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel5, BufferSize_DMA);
DMA_Cmd(DMA1_Channel5, ENABLE);
while (DMA_GetFlagStatus(DMA1_FLAG_TC5) == RESET);
DMA_ClearFlag(DMA1_FLAG_TC5);
}
void MyDMA_Transfer(int BufferSize_DMA) 函数是封装重装(DMA搬运次数DMA_BufferSize)的。

即上图的 DMA_InitStructure.DMA_BufferSize = 2; // 偏航角寄存器是2字节
因为我只读取偏航角,对应寄存器为Yaw,又

每个地址下有两字节,故我需DMA搬运2次,对应DMA_PeripheralDataSize_Byte 字节int_8,一次搬运8位,即一个字节,前面初始化函数有配置。
if(flag != 0)MyDMA_Transfer(2);
for(int8_t count=0;count<length;count++){
if(count!=length-1)
{
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
else{
I2C_AcknowledgeConfig(I2C2, DISABLE);
I2C_GenerateSTOP(I2C2, ENABLE);
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
}
}
flag ++;思路是开启DMA搬运后由于是单次模式,故搬运完2个字节后就停止了,而我们需要不断读取数据,所以需要重装搬运次数,flag用来记录重装了多少回,初始值为0,用if判断是不是程序刚开始时,原始有2次搬运次数,即开始时第一组数据无需重装,flag++。for循环,length我传入2,因为,只有两个字节,并第一个字节等待EV7事件,数据会刷入数据寄存器,同时DMA会搬运走,第二个字节也为最后一个字节,I2C协议规定要在等待“读结束”事件前给非应答和停止条件,故先
I2C_AcknowledgeConfig(I2C2, DISABLE);
I2C_GenerateSTOP(I2C2, ENABLE);
后
JY901S_WaitEvent(I2C2, I2C_EVENT_MASTER_BYTE_RECEIVED);//EV_7
7.在main.c中读取DMA搬运的目标寄存器的值即可。

JY901S_ReadReg(Yaw);
Z_Angle = ((yawAngle[1] << 8) | yawAngle[0])*180/32768;因为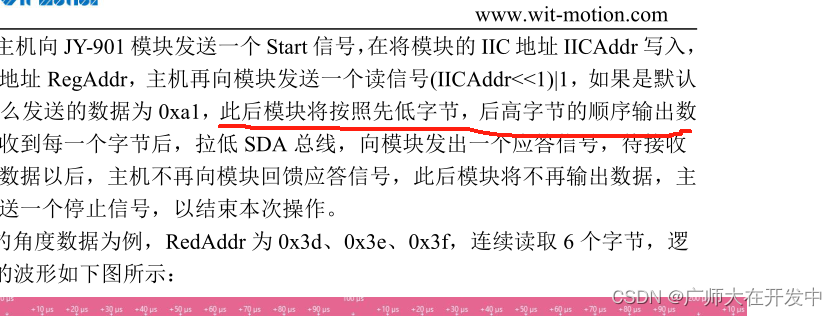
所以后读出的高位左移八位,组成一个int16数据。
4.效果演示
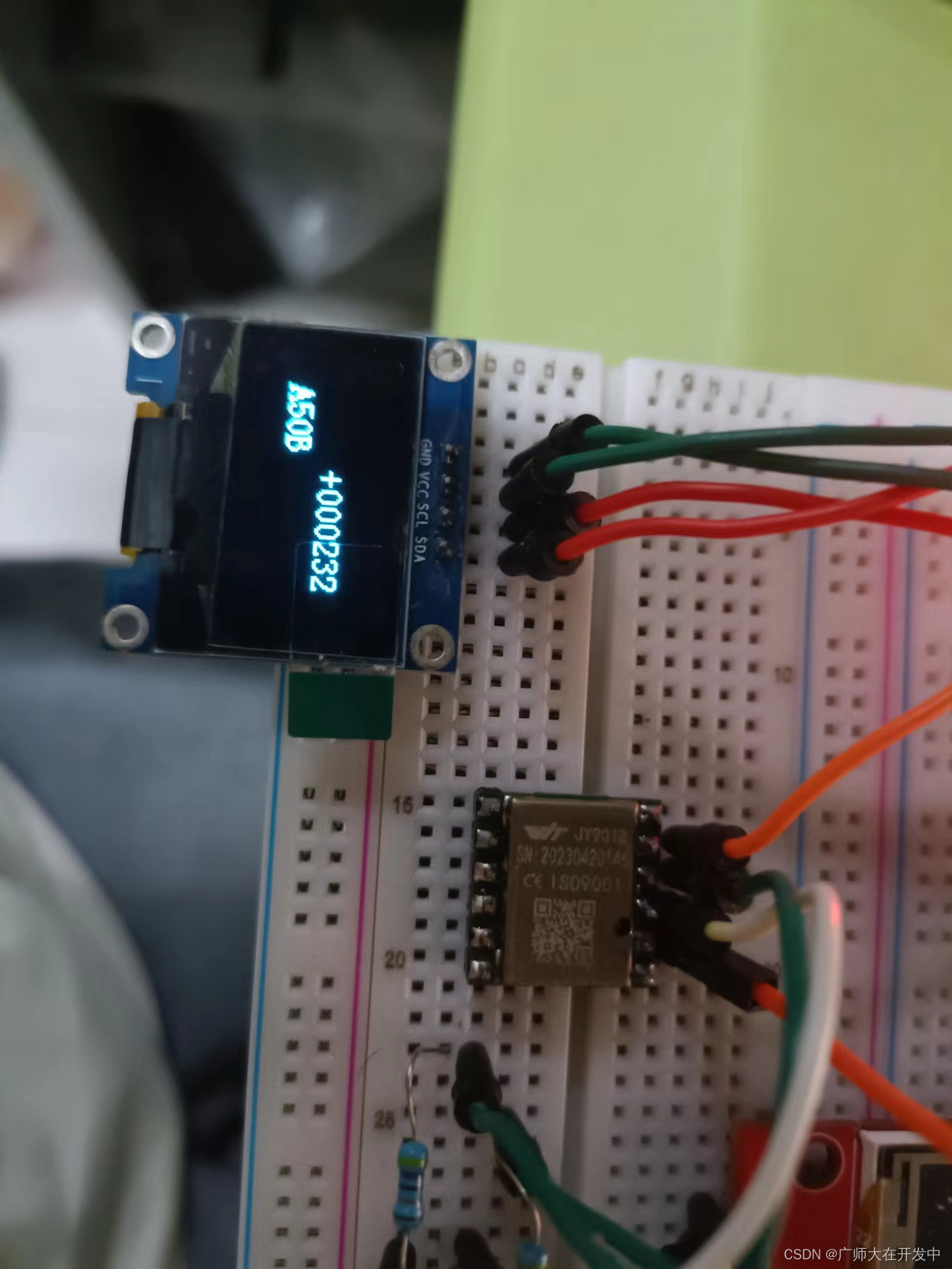
读取的16位数据为0xA50B,转10进制带入公式((yawAngle[1] << 8) | yawAngle[0])*180/32768;
计算得

符合+232,说明正确读取到数据。
谢谢观看!
智能推荐
艾美捷Epigentek DNA样品的超声能量处理方案-程序员宅基地
文章浏览阅读15次。空化气泡的大小和相应的空化能量可以通过调整完全标度的振幅水平来操纵和数字控制。通过强调超声技术中的更高通量处理和防止样品污染,Epigentek EpiSonic超声仪可以轻松集成到现有的实验室工作流程中,并且特别适合与表观遗传学和下一代应用的兼容性。Epigentek的EpiSonic已成为一种有效的剪切设备,用于在染色质免疫沉淀技术中制备染色质样品,以及用于下一代测序平台的DNA文库制备。该装置的经济性及其多重样品的能力使其成为每个实验室拥有的经济高效的工具,而不仅仅是核心设施。
11、合宙Air模块Luat开发:通过http协议获取天气信息_合宙获取天气-程序员宅基地
文章浏览阅读4.2k次,点赞3次,收藏14次。目录点击这里查看所有博文 本系列博客,理论上适用于合宙的Air202、Air268、Air720x、Air720S以及最近发布的Air720U(我还没拿到样机,应该也能支持)。 先不管支不支持,如果你用的是合宙的模块,那都不妨一试,也许会有意外收获。 我使用的是Air720SL模块,如果在其他模块上不能用,那就是底层core固件暂时还没有支持,这里的代码是没有问题的。例程仅供参考!..._合宙获取天气
EasyMesh和802.11s对比-程序员宅基地
文章浏览阅读7.7k次,点赞2次,收藏41次。1 关于meshMesh的意思是网状物,以前读书的时候,在自动化领域有传感器自组网,zigbee、蓝牙等无线方式实现各个网络节点消息通信,通过各种算法,保证整个网络中所有节点信息能经过多跳最终传递到目的地,用于数据采集。十多年过去了,在无线路由器领域又把这个mesh概念翻炒了一下,各大品牌都推出了mesh路由器,大多数是3个为一组,实现在面积较大的住宅里,增强wifi覆盖范围,智能在多热点之间切换,提升上网体验。因为节点基本上在3个以内,所以mesh的算法不必太复杂,组网形式比较简单。各厂家都自定义了组_802.11s
线程的几种状态_线程状态-程序员宅基地
文章浏览阅读5.2k次,点赞8次,收藏21次。线程的几种状态_线程状态
stack的常见用法详解_stack函数用法-程序员宅基地
文章浏览阅读4.2w次,点赞124次,收藏688次。stack翻译为栈,是STL中实现的一个后进先出的容器。要使用 stack,应先添加头文件include<stack>,并在头文件下面加上“ using namespacestd;"1. stack的定义其定义的写法和其他STL容器相同, typename可以任意基本数据类型或容器:stack<typename> name;2. stack容器内元素的访问..._stack函数用法
2018.11.16javascript课上随笔(DOM)-程序员宅基地
文章浏览阅读71次。<li> <a href = "“#”>-</a></li><li>子节点:文本节点(回车),元素节点,文本节点。不同节点树: 节点(各种类型节点)childNodes:返回子节点的所有子节点的集合,包含任何类型、元素节点(元素类型节点):child。node.getAttribute(at...
随便推点
layui.extend的一点知识 第三方模块base 路径_layui extend-程序员宅基地
文章浏览阅读3.4k次。//config的设置是全局的layui.config({ base: '/res/js/' //假设这是你存放拓展模块的根目录}).extend({ //设定模块别名 mymod: 'mymod' //如果 mymod.js 是在根目录,也可以不用设定别名 ,mod1: 'admin/mod1' //相对于上述 base 目录的子目录}); //你也可以忽略 base 设定的根目录,直接在 extend 指定路径(主要:该功能为 layui 2.2.0 新增)layui.exten_layui extend
5G云计算:5G网络的分层思想_5g分层结构-程序员宅基地
文章浏览阅读3.2k次,点赞6次,收藏13次。分层思想分层思想分层思想-1分层思想-2分层思想-2OSI七层参考模型物理层和数据链路层物理层数据链路层网络层传输层会话层表示层应用层OSI七层模型的分层结构TCP/IP协议族的组成数据封装过程数据解封装过程PDU设备与层的对应关系各层通信分层思想分层思想-1在现实生活种,我们在喝牛奶时,未必了解他的生产过程,我们所接触的或许只是从超时购买牛奶。分层思想-2平时我们在网络时也未必知道数据的传输过程我们的所考虑的就是可以传就可以,不用管他时怎么传输的分层思想-2将复杂的流程分解为几个功能_5g分层结构
基于二值化图像转GCode的单向扫描实现-程序员宅基地
文章浏览阅读191次。在激光雕刻中,单向扫描(Unidirectional Scanning)是一种雕刻技术,其中激光头只在一个方向上移动,而不是来回移动。这种移动方式主要应用于通过激光逐行扫描图像表面的过程。具体而言,单向扫描的过程通常包括以下步骤:横向移动(X轴): 激光头沿X轴方向移动到图像的一侧。纵向移动(Y轴): 激光头沿Y轴方向开始逐行移动,刻蚀图像表面。这一过程是单向的,即在每一行上激光头只在一个方向上移动。返回横向移动: 一旦一行完成,激光头返回到图像的一侧,准备进行下一行的刻蚀。
算法随笔:强连通分量-程序员宅基地
文章浏览阅读577次。强连通:在有向图G中,如果两个点u和v是互相可达的,即从u出发可以到达v,从v出发也可以到达u,则成u和v是强连通的。强连通分量:如果一个有向图G不是强连通图,那么可以把它分成躲个子图,其中每个子图的内部是强连通的,而且这些子图已经扩展到最大,不能与子图外的任一点强连通,成这样的一个“极大连通”子图是G的一个强连通分量(SCC)。强连通分量的一些性质:(1)一个点必须有出度和入度,才会与其他点强连通。(2)把一个SCC从图中挖掉,不影响其他点的强连通性。_强连通分量
Django(2)|templates模板+静态资源目录static_django templates-程序员宅基地
文章浏览阅读3.9k次,点赞5次,收藏18次。在做web开发,要给用户提供一个页面,页面包括静态页面+数据,两者结合起来就是完整的可视化的页面,django的模板系统支持这种功能,首先需要写一个静态页面,然后通过python的模板语法将数据渲染上去。1.创建一个templates目录2.配置。_django templates
linux下的GPU测试软件,Ubuntu等Linux系统显卡性能测试软件 Unigine 3D-程序员宅基地
文章浏览阅读1.7k次。Ubuntu等Linux系统显卡性能测试软件 Unigine 3DUbuntu Intel显卡驱动安装,请参考:ATI和NVIDIA显卡请在软件和更新中的附加驱动中安装。 这里推荐: 运行后,F9就可评分,已测试显卡有K2000 2GB 900+分,GT330m 1GB 340+ 分,GT620 1GB 340+ 分,四代i5核显340+ 分,还有写博客的小盒子100+ 分。relaybot@re...