毕设 基于单片机的蓝牙避障小车-程序员宅基地
0 前言
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
基于单片机的蓝牙避障小车
学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:5分
项目分享:见文末!
设计功能:
- 可蓝牙操控小车进行扫地/灭火
- 可自动导航行驶自动避障
- 可扩展设计视觉模块 实现视觉追踪
- 可扩展机械臂进行实物抓取
- 可扩展图传 循迹 等相关功能
1 超声波避障小车原理
总体方案
系统采用51单片机作为核心控制单元用于智能车系统的控制,在超声波检测到障碍物之后,主控芯片根据距离值控制直流电机的转动,在与障碍物距离较大的情况下,快速前进,在与障碍物距离较小但还未到达临界转弯方向值的时候,慢速前进。在与障碍物距离很近需要转向避障时,方案上将尝试进行转向,来进行避障。
设计原理
该智能车系统可分为三个主要模块:单片机主控核心模块,传感器避障模块,电机驱动模块。系统主要原理是:通过超声波避障模块(即感测模块)实时监测路面情况并及时传输给单片机。由单片机主控核心模块根据感测模块给予的信息控制小车两电机转动工作状态。电机驱动模块驱动两电机转动,实现前进或者左、右转。
-
(1)单片机主控核心模块。在这次设计中我们选用已经学过的MCS-51单片机为核心作为控制模块。MCS-51系列单片机是美国Intel公司于1980年推出的产品,MCS-51系列单片机的影响及其深远,许多公司都推出了兼容系列单片机,使MCS-51内核成为一个8位单片机的标准,其典型产品有8031、8051、8751等等。
-
(2)传感器避障模块。智能车避障系统中的传感器一般分为接触型和非接触型两种,接触型相对比较简单。这里我们使用了超声波传感器进行测量,也即非接触型传感器。
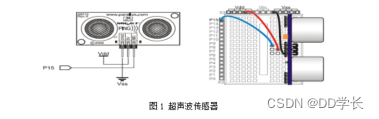
超声波是一种振动频率高于声波的机械波,由换能晶片在电压的激励下发生震动产生的,在碰到杂质获分界面会产生显著反射从而形成反射回波,超声波传感器就是根据超声波在障碍物界面上的反射来判断检测物体的存在以及距离的。超声波频率高,波长短,绕射现象小,方向性好,再加上信息处理简单且价格低廉,所以这里我们使用28015-PING-v1.6超声波传感器对小车行进前方路况进行探测以及判断,它能实现从3cm到1.8m距离的测量,从而识别出范围内的障碍物。我们将其作为传感器避障模块,利用其返回的数据,从而实现小车避障的功能。图1为超声波传感器。
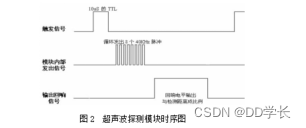
超声波探测模块的基本原理及使用方法如下:IO口触发,给Sin口至少5~10us的高电平,启动测量;模块自动发送8个40Khz的方波,自动检测是否有信号返回;有信号返回,通过IO口Sin输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间,测试距离=(高电平时间*340)/ 2。超声波探测模块的时序图如图2所示。
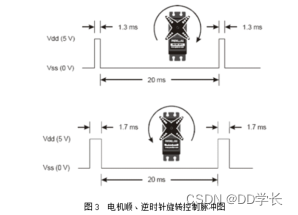
- (3)电机驱动模块。电机驱动模块是由两个伺服电机组成,伺服电机控制原理如下图3所示: 控制电机运动转速的是高电平持续的时间,当高电平持续时间为1.3ms时,电机顺时针全速旋转,当高电平持续时间1.7ms时,电机逆时针速旋转。
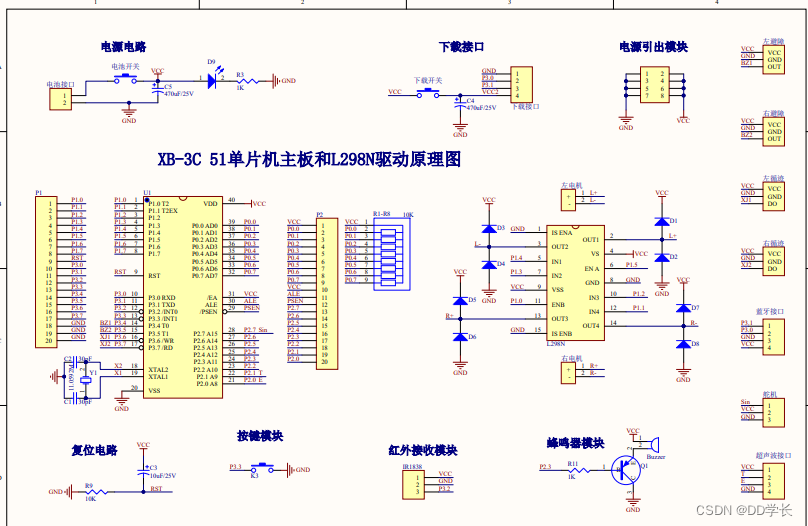
伺服电机与单片机接口的连接,图4为电机连接原理图和实际接线图,P1_0引脚的控制输出用来控制右的伺服电机,而P1_1则用来控制左边的伺服电机。
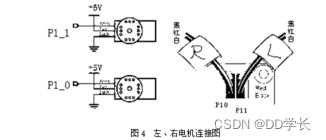
所以可知,若令左、右车轮电机高电平持续时间为1.5ms时,小车将处于静止状态。
若令左车轮电机高电平持续时间为1.7ms,右车轮电机高电平持续时间为1.3ms时,则左车轮电机逆时针,右车轮电机顺时针,小车将会以最快的速度前进。此时,若想改变小车的前进速度,则逐渐减小左电机的高电平时间,逐渐增加右电机的高电平时间,则可以减小车速。
同理可知,若令左车轮电机高电平持续时间为1.3ms,右车轮电机高电平持续时间为1.7ms时,则左车轮电机顺时针,右车轮电机逆时针,小车将会以最快的速度后退。
当需要转弯时,通过分析和测试我们可以知道,当小车想左转时,需令左右两轮均顺时针旋转,而当小车想右转时,需令左右两轮均逆时针旋转。
具体实施方案及程序流程图
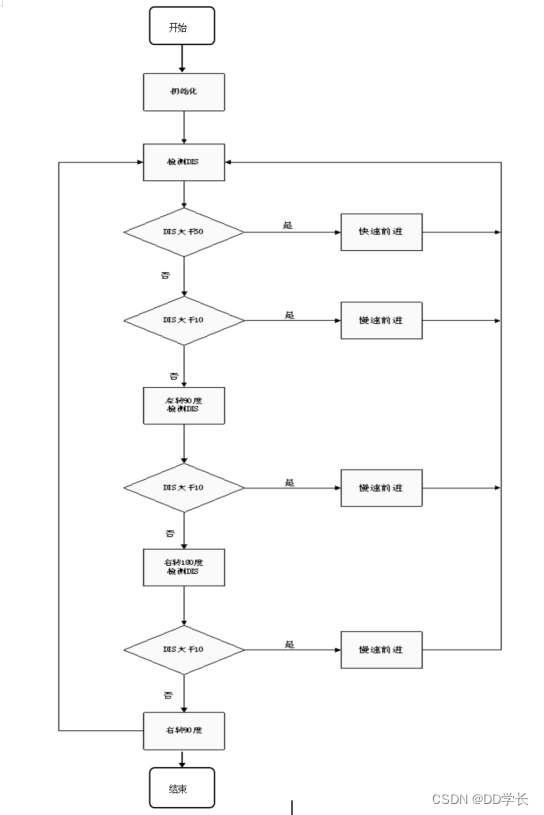
小车的避障流程如下:
(1)在车前方没有障碍物时,小车沿直线向前走。
(2)在车前方有障碍物时,小车能避开障碍物,避障方法如下:
- ①先向左边转90度,如果前面没有障碍物,再沿直线向前走;
- ②如果前面仍有障碍物,则向右转180度,如果前面没有障碍物,则沿直线向前行走;
- ③如果前面仍有障碍物,则向右90度,然后直线行。
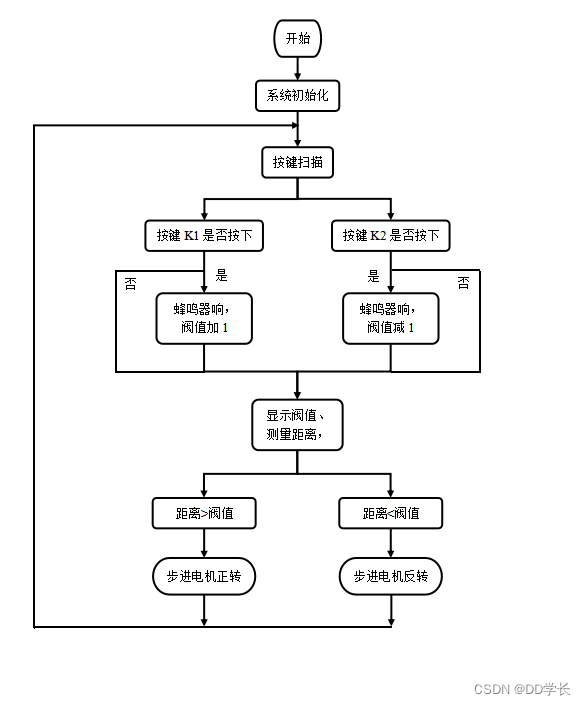
主程序流程图如图所示
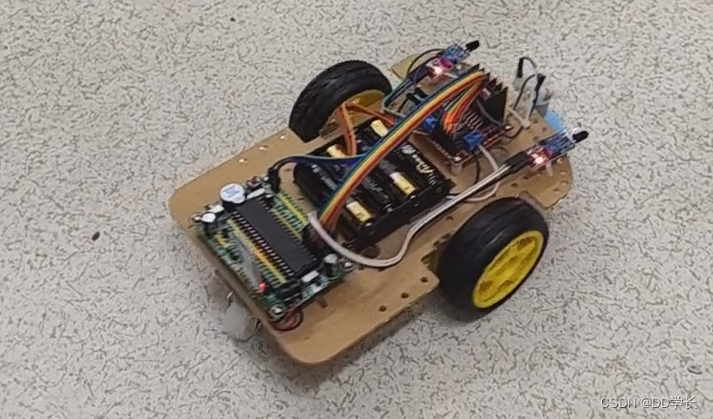
2 实现效果
毕业设计 基于单片机的蓝牙避障小车
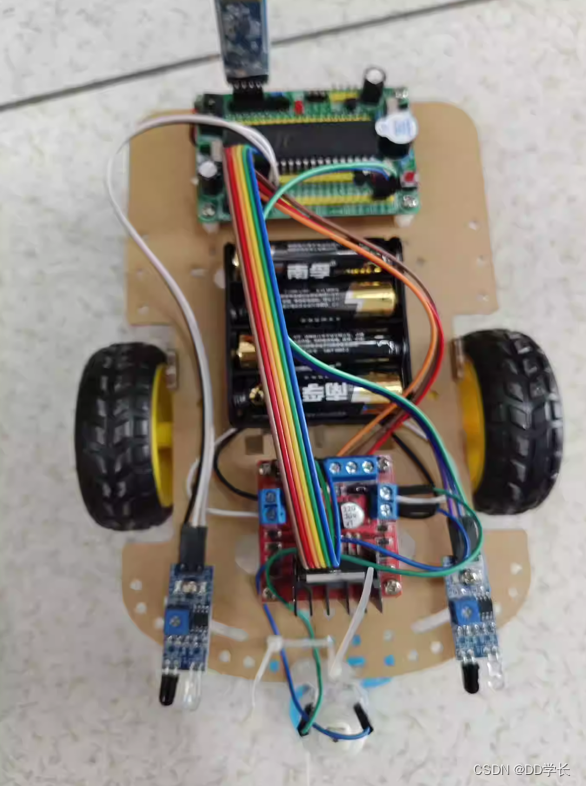

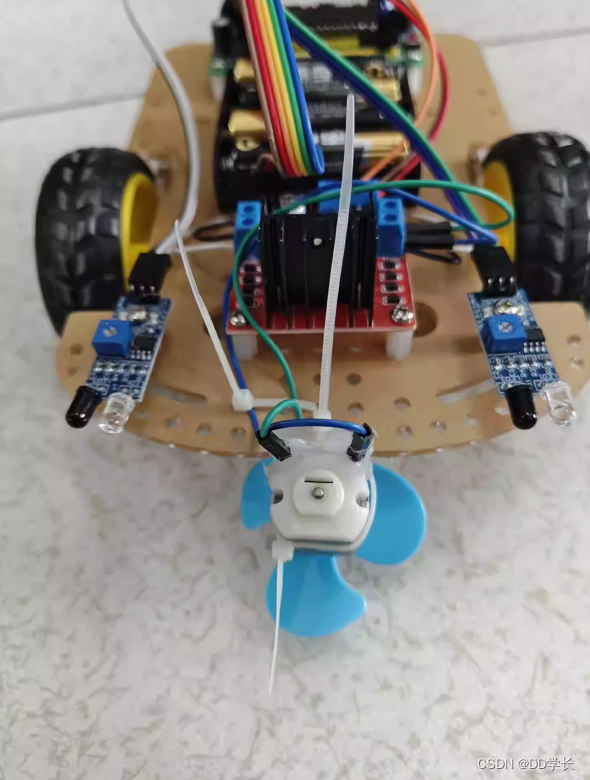
3 硬件设计
4 软件流程设计
5 最后
包含内容
项目分享:见文末!
**项目分享: ** https://blog.csdn.net/m0_984093
智能推荐
一个ngrok如何穿透多个端口?_ngrok多个端口-程序员宅基地
文章浏览阅读2.7k次,点赞2次,收藏4次。如何不充钱就可以穿透多个端口?./ngrok authtoken 授权码之前这个操作的生成的yml文件中修改 端口可添加多个addr:port端口可随意配置_ngrok多个端口
C语言 char转uint8_t-程序员宅基地
文章浏览阅读5.9k次。char转uint8_t:static int char2uint(char *input, uint8_t *output){ for(int i = 0; i < 24; i++) { output[i] &= 0x00; for (int j = 1; j >= 0; j--) { char hb = input[i*2 + 1 - j]; if (hb >= '0' &..._char转uint8_t
android 陀螺仪简单使用,判读手机是否静止状态_安卓陀螺仪多少才算静止-程序员宅基地
文章浏览阅读6.5k次,点赞5次,收藏13次。陀螺仪允许您在任何给定时刻确定Android设备的角速度。简单来说,它告诉您设备绕X,Y和Z轴旋转的速度有多快。最近,即使是预算手机正在制造,陀螺仪内置,增强现实和虚拟现实应用程序变得如此受欢迎。通过使用陀螺仪,您可以开发可以响应设备方向的微小更改的应用程序。创建陀螺仪对象和管理器manager// Register it, specifying the polling interv..._安卓陀螺仪多少才算静止
lib静态库逆向分析_libtersafe-程序员宅基地
文章浏览阅读4.7k次,点赞3次,收藏16次。当我们要分析一个lib库里的代码时,首先需要判断这是一个静态库还是一个导入库。库类型判断lib文件其实是一个压缩文件。我们可以直接使用7z打开lib文件,以查看里面的内容。如果里面的内容是obj文件,表明是静态库。如果里面的内容是dll文件,表明是导入库。导入库里面是不包含代码的,代码包含在对应的dll文件中。从lib中提取obj静态库是一个或者多个obj文件的打包,这里有两个方法从中提取obj:Microsoft 库管理器 7z解压Microsoft 库管理器(li_libtersafe
Linux的网络适配器_linux 查询网络适配器-程序员宅基地
文章浏览阅读5.3k次,点赞3次,收藏3次。了解一下,省的脑壳痛 桥接模式对应的虚拟网络名称“VMnet0” 桥接模式下,虚拟机通过主机的网卡进行通信,若物理主机有多块网卡(有线的和无线网卡),应选择桥结哪块物理网卡桥接模式下,虚拟机和物理主机同等地位,可以通过物理主机的网卡访问外网(局域网),一个局域网的其他计算机可以访问虚拟机。为虚拟机设置一个与物理网卡在同个网段的IP,则虚拟机就可以与物理主机以及局域..._linux 查询网络适配器
【1+X Web前端等级考证 】 | Web前端开发中级理论 (附答案)_1+xweb前端开发中级-程序员宅基地
文章浏览阅读3.4w次,点赞77次,收藏438次。# 前言2020 12月 1+X Web 前端开发中级 模拟题大致就更这么多,我的重心不在这里,就不花太多时间在这里面了。但是,说说1+X Web前端开发等级考证这个证书,总有人跑到网上问:这个证书有没有用? 这个证书含金量高不高?# 关于考不考因为这个是工信部从2019年才开始实施试点的,目前还在各大院校试点中,就目前情况来看,知名度并不是很高,有没有用现在无法一锤定音,看它以后办的怎么样把,软考以前也是慢慢地才知名起来。能考就考吧,据所知,大部分学校报考,基本不用交什么报考费(小部分学校,个别除._1+xweb前端开发中级
随便推点
项目组织战略管理及组织结构_项目组织的具体形态的是战略管理层-程序员宅基地
文章浏览阅读1.7k次。组织战略是组织实施各级项目管理,包括项目组合管理、项目集管理和项目管理的基础。只有从组织战略的高度来思考,思考各个层次项目管理在组织中的位置,才能够理解各级项目管理在组织战略实施中的作用。同时战略管理也为项目管理提供了具体的目标和依据,各级项目管理都需要与组织的战略保持一致。..._项目组织的具体形态的是战略管理层
图像质量评价及色彩处理_图像颜色质量评价-程序员宅基地
文章浏览阅读1k次。目录基本统计量色彩空间变换亮度变换函数白平衡图像过曝的评价指标多视影像因曝光条件不一而导致色彩差异,人眼可以快速区分影像质量,如何利用图像信息辅助算法判断影像优劣。基本统计量灰度均值方差梯度均值方差梯度幅值直方图图像熵p·log(p)色彩空间变换RGB转单通道灰度图像 mean = 225.7 stddev = 47.5mean = 158.5 stddev = 33.2转灰度梯度域gradMean = -0.0008297 / -0.000157461gr_图像颜色质量评价
MATLAB运用规则,利用辛普森规则进行数值积分-程序员宅基地
文章浏览阅读1.4k次。Simpson's rule for numerical integrationZ = SIMPS(Y) computes an approximation of the integral of Y via the Simpson's method (with unit spacing). To compute the integral for spacing different from one..._matlab利用幸普生计算积分
【AI之路】使用huggingface_hub优雅解决huggingface大模型下载问题-程序员宅基地
文章浏览阅读1.2w次,点赞28次,收藏61次。Hugging face 资源很不错,可是国内下载速度很慢,动则GB的大模型,下载很容易超时,经常下载不成功。很是影响玩AI的信心。经过多次测试,终于搞定了下载,即使超时也可以继续下载。真正实现下载无忧!究竟如何实现?且看本文分解。_huggingface_hub
mysql数据库查看编码,mysql数据库修改编码_查看数据库编码-程序员宅基地
文章浏览阅读3.5k次,点赞2次,收藏7次。其中 `DEFAULT CHARSET` 和 `COLLATE` 分别指定了表的默认编码和排序规则。其中 `DEFAULT CHARACTER SET` 指定了数据库的默认编码。其中 `Collation` 列指定了字段的排序规则,这也是字段的默认编码。此命令将更改表的默认编码和排序规则。此命令将更改字段的编码和排序规则。此命令将更改数据库的默认编码。_查看数据库编码
机器学习(十八):Bagging和随机森林_bagging数据集-程序员宅基地
文章浏览阅读1.3k次,点赞7次,收藏24次。本文深入探讨了集成学习及其在随机森林中的应用。对集成学习的基本概念、优势以及为何它有效做了阐述。随机森林,作为一个集成学习方法,与Bagging有紧密联系,其核心思想和实现过程均在文中进行了说明。还详细展示了如何在Sklearn中利用随机森林进行建模,并对其关键参数进行了解读,希望能帮助大家更有效地运用随机森林进行数据建模。_bagging数据集